Схема вращения двигателей квадрокоптера: Настройка моторов ArduPilot Mega APM квадрокоптера
Содержание
Настройка моторов ArduPilot Mega APM квадрокоптера
- Главная
- База знаний
- Квадрокоптеры
- Возможности
- Купить
- Задать вопрос
Настройка моторов
Мультикоптеры требуют вращение двигателей в определенных направлениях в зависимости от их конфигурации.
Производя первоначальные установки вы должны убедиться в правильном вращении каждого двигателя.
Эта страница дает инструкции по настройке направления двигателей, выбору пропеллеры и их соединению.
Проверка направление вращения двигателя
- Убедитесь, что нет установленных пропеллеров на вашем квадрокоптере!
- Включите аппаратуру и установите режим полета Stabilize (Стабилизация).
- Подключите LiPo батарею.
- Снимите с охраны квадрокоптер (Arming) удерживая стик газа вниз и положение руддера вправо. (нижняя правое положение) в течение пяти секунд.
- Если квадрокоптер не снимится с охраны после этих действий, возможно его полетный контроллер нашел предполетную ошибку (Pre-Arm Safety Check).

- Безопасная предполетная проверка синаглизирует ошибку циклическим двойным миганием красного светодиода.
- Если вы не можете пройти предполетную проверку безопасности , о посетите страницу Prearm Safety Check и исправите проблему или отключить эту проверку, прежде чем продолжать.
- Когда вы сняли с охраны квадрокоптер (arming) дайте небольшое количество газа и наблюдайте за направлением вращения каждого двигателя.
Установите правильные направления вращения
Теперь, когда ваши двигатели вращаются, мы установим правильное направление для каждого двигателя.
Направление вращения двигателей (по часовой стрелке или против часовой стрелки) определяеюся подключением к регуляору ESC.
Когда вы подадите небольшое количество газа , проверьте и посмотрите направление движения каждого двигателя
Моторы должны вращаться , как указано на диаграммах ниже в зависимости от типа рамы квадрокоптера.
Проверьте схему вращения двигателей указанную ниже , что бы проверить и убедится, что двигатели производят вращения в правильном направлении.
Скорее всего некоторые из ваших моторов нужно будет переключить.
Для изменений направления вращений мотора отсоедените LiPo батарею.
Что бы поменять сторону вращения мотора вам необходимо переключить два из трех кабелей регулятора ESC соединяющие мотор, подключите как показано ниже.
Выбор винтов
- Практика показывает, что в документации каждого мотора есть своя таблица пропеллеров, которые рекомендует производиель, можно следовать этим рекомендациям при выборе пропеллеров.
- Найдите вашу раму квадрокоптера в указанных изображениях. Используйте толкательные пропеллеры в зависимости от нужного вам направления.
- Толкательные пропеллеры, как правило, с пометкой «P» или «SFP» на нем.
- Выберите необходимые пропеллеры на основе направления каждого двигателя.
- Винты бывают разных вариантов и подходят для различных нужд.
Прикрепите винты
- Отвинтите гайки у моторов и соедените пропеллер на моторную цангу с надписями лицом вверх.

- Если у вас соосная конфигурация двигателей, убедитесь, что надпись на пропеллере лицом вверх, даже если двигатель смотрит вниз.
- Установите шайбу сверху пропеллера если это необходимо (зависит от конфигурации крепежа и пропеллеров).
- Затяните гайки для фиксации пропеллеров.
- Зафиксируйте мотор или используйте второй гаечный ключ для более лучшей фиксации пропеллеров.

Более подробную информацию по настройки двигателей (и RC входов) можно найти (Here!) .
Как летает квадрокоптер, пропеллеры и двигатель в подробностях
Чтобы понимать, как работает квадрокоптер, надо разобраться в его конструкции, двигателях и направление вращения пропеллеров.
Научиться управлять дроном в любом направлении сегодня очень легко. Они также способны плавно зависать в воздухе на одном месте. Конструктивные особенности его дизайна и полетных характеристик сильно отличаются от самолета или вертолета.
В этом статье мы рассмотрим, как летает квадрокоптер, требуемое направление двигателей, их конфигурацию, настройку, конструкцию пропеллеров, а также тягу двигателя квадрокоптера и необходимые расчеты. Также покажем несколько отличных и интересных видео на эти темы.
Также покажем несколько отличных и интересных видео на эти темы.
Как работает квадрокоптер
Как квадрокоптер зависает или летит в любом направлении, поднимается или опускается в одно мгновение, от прикосновений к ручке пульта дистанционного управления. Дроны способны летать автономно через запрограммированное программное обеспечение для навигации по маршрутным точкам и летать в любом направлении от точки к точке. Давайте рассмотрим используемые технологии в мультикоптерах в подробностях.
Направление вращения пропеллеров наряду со скоростью двигателя дрона, что делает возможным его полет и маневренность. Пульт радиоуправления квадрокоптером отправляет информацию контроллеру на беспилотнике, и передает данные двигателям через их электронные схемы управления скоростью (ESC) о тяге, оборотах, и направлении. Контроллер полета объединяет данные IMU (инерциального измерительного модуля), гироскопа и GPS перед подачей сигналов двигателям квадрокоптера о тяге и скорости вращения ротора.
Несмотря на то, что современные технологии беспилотных летательных аппаратов и квадрокоптеров являются современными, они все еще используют старые принципы парного полета, гравитации, действия и реакции.
При изготовлении квадрокоптеров, винтов и конструкции двигателя учитываются основные 4 силы, влияющие на весь полет: вес, подъем, тяга и также являются важными факторами. Математика используется для расчета тяги двигателя квадрокоптера, в то время как аэродинамика самолета используется для расчета винта и движения воздуха над, под и вокруг квадрокоптера.
Важность понимания того, как летает и работает квадрокоптер
С небольшим опытом управления полетом, квадрокоптер становится практически автоматическим. Вы перемещаете джойстики на пульте радиоуправления, направляющие дрон в любом направлении, в котором вы хотите, чтобы он летел. Нам не нужно думать о том, что делают двигатели или пропеллеры.
Теперь предположим, что мультикоптер полетел неправильно. Может быть, его тянет в каком-то направлении, и он не зависает на одном месте. Хорошее понимание того, как летает и работает квадрокоптер, поможет вам найти проблему с двигателем или пропеллером, особенно если визуальный осмотр не выявил неисправности.
Хорошее понимание того, как летает и работает квадрокоптер, поможет вам найти проблему с двигателем или пропеллером, особенно если визуальный осмотр не выявил неисправности.
Когда вы понимаете конструкцию пропеллеров (винтов) квадрокоптера и тягу двигателя, у вас появляется возможность внести изменения в свой дрон. Например, снять камеру и установить что-то другое, например датчик времени полета или лидар. Полеты с дополнительным весом влияют на контроль, полет и баланс беспилотника.
Если вы проектируете или создаете свой собственный квадрокоптер, то понимание конструкции двигателя и винта является важной информацией. Вам нужно подобрать правильную конфигурацию двигателя квадрокоптера, соответствующие пропеллеры, электронные схемы управления скоростью, а также IMU и GPS вместе с соответствующим корпусом.
Объяснение направления вращения двигателя и гребного винта Quadcopter
Как летает квадрокоптер
Изменения на пульте дистанционного управления, посылают сигналы на центральный полетный полета. Центральный контроллер полета передает эту информацию в электронные регуляторы скорости (ESC) каждого двигателя, которые, направляют каждый двигатель на увеличение или уменьшение скорости.
Центральный контроллер полета передает эту информацию в электронные регуляторы скорости (ESC) каждого двигателя, которые, направляют каждый двигатель на увеличение или уменьшение скорости.
Движение ручки дистанционного управления → Центральный контроллер полета → Электронные схемы управления скоростью (ESC) → Двигатели и пропеллеры → Движение квадрокоптера или зависание.
Центральный полетный контроллер
Теперь центральный полетный контроллер также получает информацию от IMU, гироскопа, модулей GPS и датчиков обнаружения препятствий, если они установлены на квадрокоптере. Он выполняет вычислительные расчеты с использованием запрограммированных параметров полета и алгоритмов, а затем отправляет эти данные в электронные контроллеры скорости.
Фактически, большинство полетных контроллеров включают в себя IMU, GPS, гироскоп и множество других функций для контроля полета и стабильности квадрокоптера. Довольно часто они имеют второй резервный инерциальный измерительный модуль и другие функций безопасности, такие как возврат на точку взлета.
Примером полетного контроллера послужит новый DJI N3 Flight Controller. Он имеет множество функций и может работать с различными двигателями.
ESC — электронные регуляторы скорости (оборотов)
Электронный регулятор скорости (ESC) — это электронная схема, установленная на каждом двигателе и предназначенная для изменения оборотов электродвигателя, его направления, а также торможения.
Электронные регуляторы скорости являются важным компонентом современных квадрокоптеров. Они предоставляют высокую мощность, высокую частоту и 3-фазный переменный ток для двигателей. Одновременно с этим, ESC очень маленькие и компактные. Квадрокоптеры и дроны полностью зависят от переменной скорости двигателей, приводящих в движение пропеллеры.
Направление пропеллеров и двигателей квадрокоптера
Направление пропеллеров для вертикального подъем
Вертикальный подъем зависит от направления вращения пропеллеров. Для того чтобы дрон поднялся в воздух, необходимо создать подъемную силу, равной силе гравитации или превышающей ее. Это основная идея взлета самолетов, которая сводится к контролю восходящей и нисходящей силы.
Это основная идея взлета самолетов, которая сводится к контролю восходящей и нисходящей силы.
Квадрокоптеры используют конструкцию двигателя и направление вращения винта для создания требуемой тяги, чтобы управлять силой тяжести, воздействующей на летательный аппарат.
Вращение винтов приводит к вытеснению воздуха. Все силы приходят парами (Третий Закон Ньютона), что означает, для каждой силы действия существует равная (по размеру) и противоположная (по направлению) сила противодействия. Поэтому, когда ротор толкает воздух вниз, воздух толкает ротор вверх. Чем быстрее вращаются роторы, тем больше подъемная сила и наоборот.
Дрон может делать три вещи в вертикальной плоскости: зависать, подниматься или опускаться.
Зависание на месте – для зависания, тяга четырех роторов толкает дрон вверх и должна быть точно равна силе гравитации, притягивающей его вниз.
Подъем вверх – достигается путем увеличения тяги (скорости) четырех роторов квадрокоптера так, чтобы сила, направленная вверх, была больше веса и силы тяжести.
Вертикальный спуск или падение вниз — требует выполнения полной противоположности подъему. Уменьшается тяга, чтобы сила была направлена вниз.
Направление пропеллеров — рыскание, тангаж, крен
Прежде чем углубиться в настройку двигателя и пропеллеров квадрокоптера, давайте немного объясним терминологию, используемую, когда он летит вперед, назад, вбок или вращается при зависании.
Рыскание (Yaw)— это вращение или поворот квадрокоптера вправо или влево. Это основное движение для вращения мультикоптера. На большинстве дронов это достигается с помощью левой ручки газа влево или вправо.
Тангаж (Pitch)— это движение квадрокоптера вперед или назад. Подача вперед обычно достигается нажатием ручки газа вперед, что заставляет квадрокоптер наклоняться и двигаться вперед от вас. Шаг назад достигается перемещением ручки газа назад.
Крен (Roll)— Большинство людей путают крен с рысканием. Крен заставляет квадрокоптер лететь вбок, влево или вправо. Он управляется правой ручкой газа, заставляя его летать слева направо.
Он управляется правой ручкой газа, заставляя его летать слева направо.
Большинство высокотехнологичных дронов, таких как квадрокоптер Yuneec Q500 4k, позволяют управлять им двумя различными способами. Вы можете летать на дроне, как будто вы пилот и на самом деле в квадрокоптере. Вы управляете ручками по-разному относительно крена, в зависимости от того, приближается ли дрон к вам или улетает от вас.
Вот короткое видео, которое очень просто показывает вам, каковы движения крена, тангажа и рыскания.
Направление двигателя для рыскания
На квадрокоптере, таком как DJI Mavic Pro или последняя версия Mavic 2 Pro, рыскание управляется правой ручкой управления на пульте дистанционного радиоуправления. Перемещение джойстика влево или вправо приведет к повороту квадрокоптера влево или вправо.
Движение на пульте передают сигналы на полетный контроллер, который отправляет данные на регуляторы скорости квадрокоптера, управляющие конфигурацией и скоростью каждого двигателя.
Чтобы увидеть, как это на самом деле работает, взгляните на диаграмму конфигурации пропеллеров выше. На схеме изображен квадрокоптер DJI Phantom 3, вид сверху с роторами, обозначенными от 1 до 4.На приведенной схеме, вы можете видеть конфигурацию двигателя квадрокоптера: 2-й и 4-й двигатели вращаются против часовой стрелки, а 1-й и 3-й вращаются по часовой стрелке. С двумя наборами двигателей квадрокоптера, настроенными на вращение в противоположных направлениях, суммарный угловой момент равен нулю.
Угловой момент является вращательным эквивалентом линейного импульса и рассчитывается путем умножения угловой скорости на момент инерции. Какой момент инерции? Это похоже на массу, но только он имеет дело с вращением. Угловой момент зависит от того, как быстро вращаются роторы.
Концептуально момент инерции можно рассматривать как представление сопротивления объекта изменению угловой скорости.
Если на двигателях квадрокоптера крутящий момент отсутствует, то общий угловой момент должен оставаться постоянным, равным нулю. Чтобы понять угловое движение вышеуказанного квадрокоптера, представьте, что 2-й и 4-й ротор, имеют положительный угловой момент, а 1-й и 3-й имеют отрицательный угловой момент. Назначим каждому двигателю значение -4, +4, -4, +4, что в сумме равно нулю.
Чтобы понять угловое движение вышеуказанного квадрокоптера, представьте, что 2-й и 4-й ротор, имеют положительный угловой момент, а 1-й и 3-й имеют отрицательный угловой момент. Назначим каждому двигателю значение -4, +4, -4, +4, что в сумме равно нулю.
Чтобы повернуть дрон вправо, нужно уменьшить угловую скорость двигателя 1, чтобы иметь угловой момент -2 вместо -4. Если бы ничего не случилось, общий момент импульса квадрокоптера теперь был бы +2. Так вот, этого не может быть. Дрон теперь будет вращаться по часовой стрелке, так что его корпус имеет момент импульса -2.
Уменьшение вращения ротора 1 действительно привело к вращению дрона, но также вызывает проблему. Это также уменьшило тягу от двигателя 1. Теперь направленная вверх сила не равна силе гравитации, и квадрокоптер опускается.
Кроме того, тяга двигателя квадрокоптера не одинакова, поэтому квадрокоптер становится неуравновешенным. Квадрокоптер наклонится вниз в направлении двигателя 1.
Чтобы вращать дрон без создания вышеуказанных дисбалансов, необходимо уменьшить вращение двигателей 1 и 3 с увеличением вращения вращающихся роторов 2 и 4.
Угловой момент вращения роторов по-прежнему не равен нулю, поэтому корпус дрона должен вращаться. Однако общая сила остается равной силе гравитации, и дрон продолжает зависать. Поскольку нижние упорные роторы расположены по диагонали друг от друга, дрон может оставаться в равновесии.
Направление пропеллеров квадрокоптера для тангажа и крена
Поскольку большинство квадрокоптеров симметричны (например, DJI Phantom 4 Pro v2, Autel X-Star и Holy Stone HS 100 Drone), нет никакой разницы между движением вперед или назад. То же самое относится и к движению из стороны в сторону. Как лететь вперед также объясняет, как летать назад или вбок.
Чтобы лететь вперед, необходимо увеличить число оборотов двигателя квадрокоптера (скорость вращения) роторов 3 и 4 (задние двигатели) и уменьшить частоту вращения роторов 1 и 2 (передние двигатели). Общая сила тяги останется равной весу, поэтому дрон останется на том же вертикальном уровне.
Кроме того, поскольку один из задних роторов вращается против часовой стрелки, а другой по часовой стрелке, увеличенное вращение этих двигателей будет по-прежнему создавать нулевой угловой момент.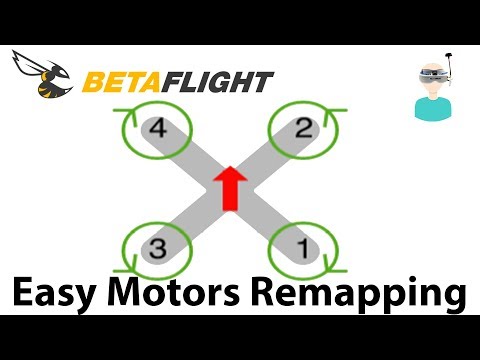 То же самое относится и к передним роторам, поэтому дрон не вращается.
То же самое относится и к передним роторам, поэтому дрон не вращается.
Большая сила в задней части дрона означает, что он наклонится вперед. Теперь небольшое увеличение тяги для всех роторов приведет к созданию силы тяги, которая уравновешивает вес вместе с движением вперед.
Как работает квадрокоптер вместе с пропеллерами и моторами
Понимание направления двигателя дрона и пропеллера, а также конструкция показывают нам, как работает квадрокоптер.
Современные квадрокоптеры очень легко летают в любом направлении. Они также могут очень плавно зависать на месте. Инженерия и дизайн отличаются от самолета или вертолета для полета.
В этом посте мы рассмотрим, как летает квадрокоптер, требуемое направление двигателя, конфигурацию, настройку, конструкцию пропеллера, а также тягу двигателя квадрокоптера и необходимые расчеты.
Есть также несколько отличных видеороликов и ссылок на очень интересные соответствующие статьи для дальнейшего чтения о том, как летает квадрокоптер.
Как работает квадрокоптер
Итак, как квадрокоптер парит или летит в любом направлении, поднимается или опускается в момент касания стика пульта дистанционного управления. Дроны также могут летать автономно через запрограммированное программное обеспечение для навигации по путевым точкам и летать в любом направлении от точки к точке. Итак, давайте посмотрим на технологию квадрокоптера, которая делает это возможным.
Направление пропеллера вместе с вращением и скоростью двигателя дрона делают его полет и маневренность возможными.
Контроллер полета квадрокоптера отправляет информацию двигателям через их электронные схемы управления скоростью (ESC) о тяге, оборотах в минуту, (оборотов в минуту) и направлении. Контроллер полета также будет объединять данные IMU, гироскопа и GPS, прежде чем сигнализировать двигателям квадрокоптера о тяге и скорости вращения ротора.
Несмотря на то, что сегодняшние технологии дронов и квадрокоптеров полностью современны, они все еще используют старые принципы полета самолета, гравитации, действия и реакции.
При изготовлении квадрокоптеров, пропеллеров и двигателей также важно учитывать 4 силы, влияющие на весь полет (вес, подъемная сила, тяга и сопротивление).
Математика также используется для расчета тяги двигателя квадрокоптера, в то время как аэродинамика самолета используется для проектирования пропеллера и движения воздуха над, под и вокруг квадрокоптера.
Важность того, как работает и летает квадрокоптер
С небольшим опытом управление квадрокоптером становится автоматическим. Вы перемещаете стики на наземной станции дистанционного управления, которые направляют квадрокоптер в любом направлении, в котором вы хотите, чтобы он летал. Нам не нужно думать о том, что делают двигатели или пропеллеры.
Теперь предположим, что ваш квадрокоптер летел неправильно. Возможно, он тянет в одном направлении или зависает не плавно. Что ж, понимание того, как работает и летает квадрокоптер, поможет вам определить проблему с двигателем или пропеллером, особенно если визуальный осмотр не выявил неисправности.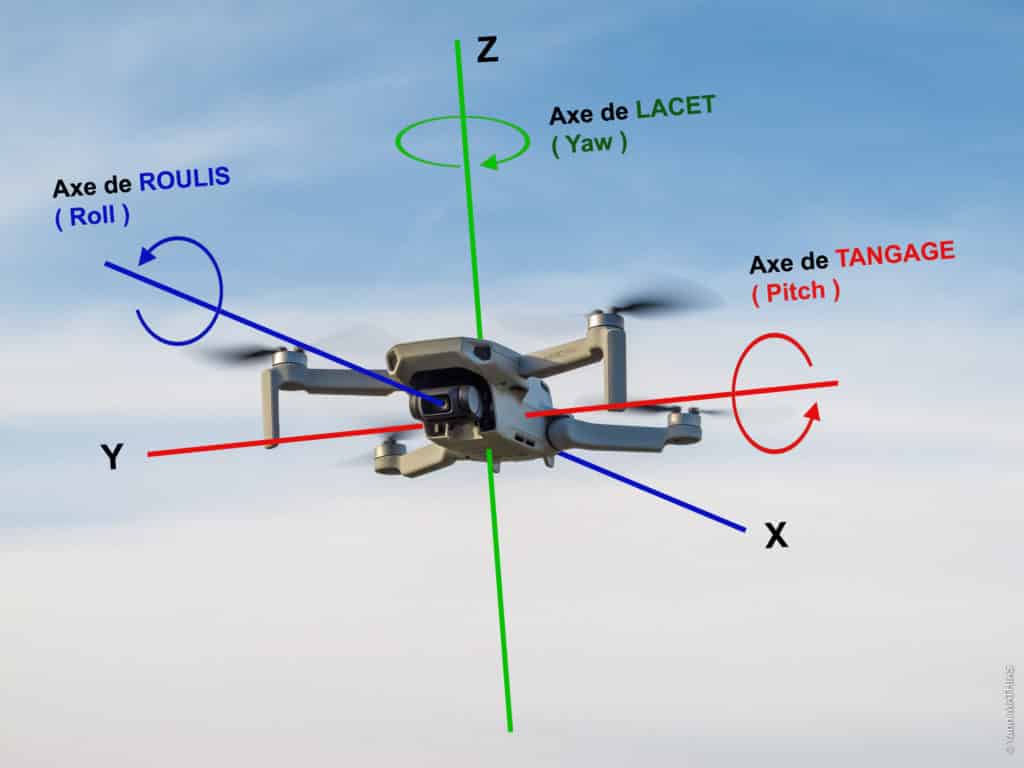
Когда вы понимаете конструкцию пропеллера квадрокоптера и тягу двигателя, вы можете вносить изменения в свой квадрокоптер, например, снимать камеру и устанавливать другую полезную нагрузку, например датчик времени полета или лидар.
Полеты с другой полезной нагрузкой повлияют на управление, полет и баланс дрона. Тогда другая полезная нагрузка потребует другой тяги двигателя квадрокоптера.
Если вы строите или проектируете квадрокоптеры, понимание конструкции двигателя и пропеллера является важной информацией. Вам нужна правильная конфигурация двигателя квадрокоптера, соответствующие пропеллеры, электронные схемы управления скоростью, а также IMU и GPS вместе с правильным корпусом.
Если вы хотите узнать больше обо всех других компонентах, из которых состоит наш обычный дрон, прочитайте эту потрясающую статью о всех типах технологий дронов.
Хорошо, давайте теперь посмотрим, как летает дрон, а именно на пропеллер квадрокоптера, направление и дизайн двигателя.
Объяснение направления двигателя и пропеллера квадрокоптера
Как летает квадрокоптер
По сути, движение стиков дистанционного управления посылает сигналы на центральный контроллер полета. Этот центральный контроллер полета отправляет эту информацию на электронные контроллеры скорости (ESC) каждого двигателя, которые, в свою очередь, направляют свои двигатели на увеличение или уменьшение скорости.
Движение ручки дистанционного управления → Центральный контроллер полета → Электронные схемы управления скоростью (ESC) → Двигатели и пропеллеры → Движение или зависание квадрокоптера.
Центральный контроллер полета
Теперь центральный контроллер полета также получает информацию от IMU, гироскопа, модулей GPS и датчиков обнаружения препятствий, если они установлены на квадрокоптер. Он выполняет вычислительные расчеты с использованием запрограммированных параметров полета и алгоритмов, а затем отправляет эти данные на электронные регуляторы скорости.
Фактически, большинство полетных контроллеров включают в себя IMU, GPS, гироскоп и множество других функций для управления полетом и стабильностью квадрокоптера. Довольно часто они имеют двойные IMU для резервирования и других функций безопасности, таких как Return-To-Home.
Примером центрального контроллера полета может быть новый контроллер полета DJI N3. Он имеет множество функций и может работать с различными двигателями.
Электронные схемы управления скоростью (ESC)
Каждый двигатель квадрокоптера имеет схему, называемую электронной регулировкой скорости (ESC). Электронный регулятор скорости — это электронная схема, предназначенная для изменения скорости электродвигателя, его направления, а также торможения.
Электронные регуляторы скорости являются важным компонентом современных квадрокоптеров. Они обеспечивают высокую мощность, высокую частоту и высокое разрешение трехфазного переменного тока для двигателей. В то же время эти ESC действительно маленькие и компактные.
Квадрокоптеры и дроны полностью зависят от переменной скорости двигателей, приводящих в движение пропеллеры. Это широкое разнообразие и тяга RPM, а также контроль скорости двигателя / пропеллера дают квадрокоптеру все необходимое управление для полета.
Чтобы узнать больше об электронных регуляторах скорости, просмотрите это потрясающее видео под названием «Основы радиоуправления — регуляторы скорости».
Двигательная установка дрона
Регуляторы скорости вращения являются одним из очень важных компонентов двигательной установки дрона. ESC должны иметь соответствующие двигатели дрона, которые, в свою очередь, должны иметь совместимые пропеллеры. Вот список компонентов двигателя и силовой установки дрона;
- Статор двигателя
- Моторный звонок (ротор)
- Обмотки
- Подшипники
- Система охлаждения
- Электронные регуляторы скорости
- Программа обновления ESC
- Пропеллеры
- Проводка
- Рука
Направление пропеллера двигателя квадрокоптера
Вертикальный подъем – направление пропеллера двигателя квадрокоптера
Чтобы квадрокоптер поднялся в воздух, должна быть создана сила, равная или превышающая силу тяжести.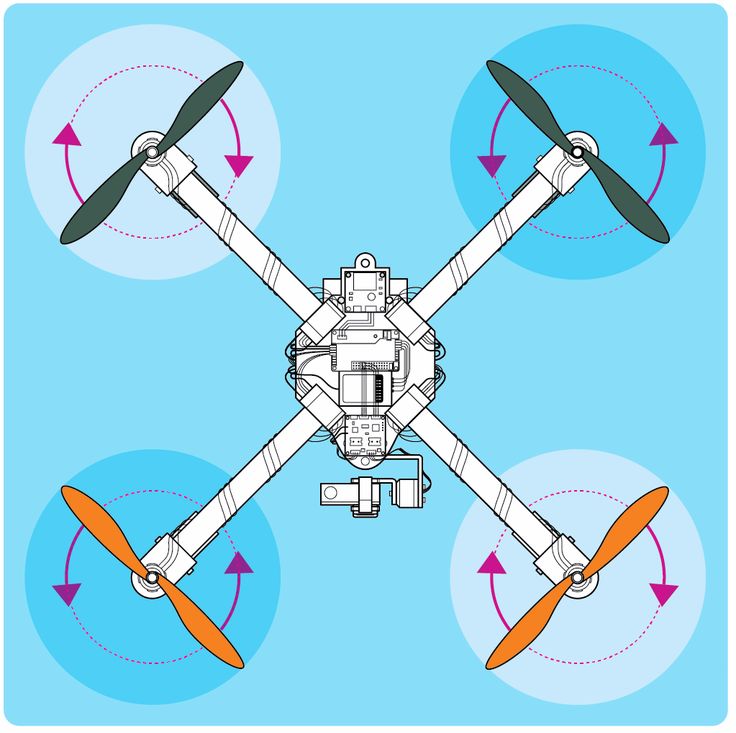 Это основная идея подъемной силы самолета, которая сводится к управлению восходящей и нисходящей силой.
Это основная идея подъемной силы самолета, которая сводится к управлению восходящей и нисходящей силой.
Теперь квадрокоптеры используют конструкцию двигателя и направление пропеллера для движения, чтобы в основном контролировать силу тяжести, воздействующую на квадрокоптер.
Вращение лопастей пропеллера квадрокоптера толкает воздух вниз. Все силы действуют парами (третий закон Ньютона), что означает, что для каждой силы действия существует равная (по величине) и противоположная (по направлению) сила противодействия. Следовательно, когда ротор давит на воздух, воздух давит на ротор вверх. Чем быстрее вращаются роторы, тем больше подъемная сила и наоборот.
Теперь дрон может делать три вещи в вертикальной плоскости: зависать, подниматься или опускаться.
Наведение 900:12 — Для зависания чистая тяга четырех винтов толкает дрон вверх и должна быть точно равна силе гравитации, тянущей его вниз.
Climb Ascend — Путем увеличения тяги (скорости) четырех роторов квадрокоптера, чтобы восходящая сила превышала вес и силу тяжести.
Направление пропеллера квадрокоптера — рыскание, тангаж, крен
Прежде чем углубляться в настройку двигателя и пропеллера квадрокоптера, давайте немного объясним терминологию, используемую, когда он летит вперед, назад, вбок или вращается во время зависания. Они известны как тангаж, крен и рыскание.
Рыскание — Это вращение или поворот головы квадрокоптера вправо или влево. Это основное движение для вращения квадрокоптера. На большинстве дронов это достигается перемещением левой ручки газа влево или вправо.
Шаг — это движение квадрокоптера вперед и назад. Шаг вперед обычно достигается нажатием ручки газа вперед, что заставляет квадрокоптер наклоняться и двигаться вперед, от вас. Шаг назад достигается перемещением ручки газа назад.
Roll — Большинство людей путают с Roll and Yaw. Крен заставляет квадрокоптер лететь боком, влево или вправо. Крен управляется правой ручкой газа, заставляя его лететь либо влево, либо вправо.
Большинство высокотехнологичных дронов, таких как квадрокоптер Yuneec Q500 4k, позволяют управлять им двумя разными способами. Вы можете управлять дроном, как если бы вы были пилотом и на самом деле в квадрокоптере. Вы используете ручки управления по-разному, независимо от того, приближается ли дрон к вам или улетает от вас.
Вот короткое видео, в котором очень просто показано, что такое движения по крену, тангажу и рысканию.
Направление двигателя квадрокоптера Для отклонения от курса
Отклонение или вращение головы квадрокоптера вправо или влево. На дронах, таких как DJI Mavic Pro или новейший Mavic 2 Pro, действие рыскания управляется правым джойстиком на пульте дистанционного управления. Перемещение стика влево или вправо заставит квадрокоптер поворачиваться влево или вправо.
Движение на наземной станции дистанционного управления отправляет сигналы на контроллер полета, который, в свою очередь, отправляет данные для цепей ESC квадрокоптера, которые управляют конфигурацией двигателей и скоростью двигателей.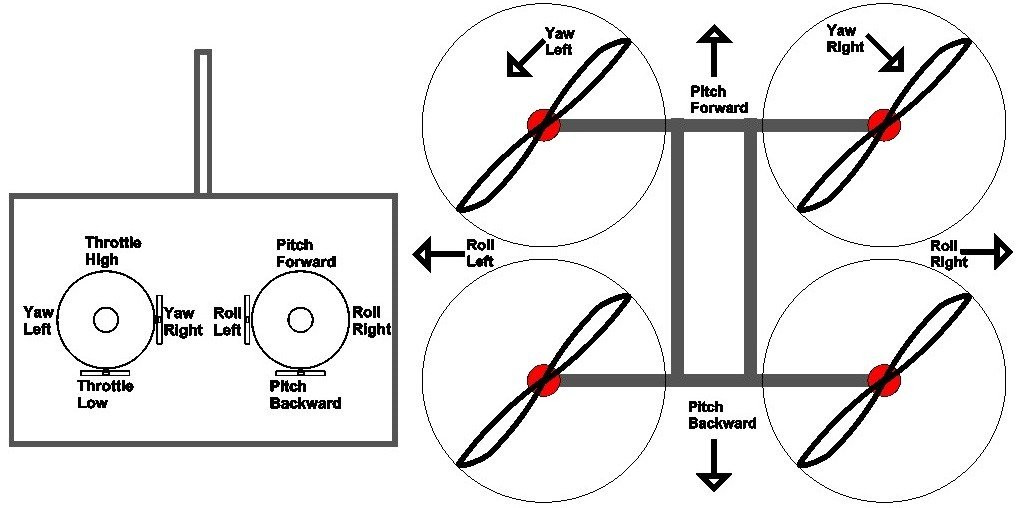
Чтобы увидеть, как это работает на самом деле, взгляните на приведенную ниже схему конфигурации пропеллера квадрокоптера. На диаграмме показан квадрокоптер DJI Phantom 3, вид сверху с роторами, помеченными цифрами от 1 до 4. ), а двигатели 1/3 вращаются по часовой стрелке (двигатели CW). С двумя наборами двигателей квадрокоптера, настроенных на вращение в противоположных направлениях, общий угловой момент равен нулю.
Угловой момент является вращательным эквивалентом линейного количества движения и рассчитывается путем умножения угловой скорости на момент инерции. Что такое момент инерции? Это похоже на массу, за исключением того, что имеет дело с вращением. Угловой момент зависит от того, насколько быстро вращаются роторы.
Концептуально, момент инерции можно рассматривать как представление сопротивления объекта изменению угловой скорости.
Если на двигателях квадрокоптера нет крутящего момента, то общий угловой момент должен оставаться постоянным, равным нулю. Чтобы понять угловое движение вышеупомянутого квадрокоптера, подумайте о 2 и 4 синих роторах против часовой стрелки, имеющих с положительным угловым моментом и зеленые двигатели квадрокоптера, вращающиеся по часовой стрелке, с отрицательным угловым моментом. Я назначу каждому двигателю значение -4, +4, -4, +4, что равно нулю
Чтобы понять угловое движение вышеупомянутого квадрокоптера, подумайте о 2 и 4 синих роторах против часовой стрелки, имеющих с положительным угловым моментом и зеленые двигатели квадрокоптера, вращающиеся по часовой стрелке, с отрицательным угловым моментом. Я назначу каждому двигателю значение -4, +4, -4, +4, что равно нулю
Чтобы повернуть дрон вправо, затем уменьшите угловую скорость двигателя 1, чтобы получить угловой момент -2 вместо -4. Если бы ничего другого не произошло, общий угловой момент квадрокоптера теперь был бы +2. Такого не может быть. Теперь дрон будет вращаться по часовой стрелке, так что угловой момент корпуса дрона будет равен -2.
Уменьшение скорости вращения ротора 1 действительно привело к вращению дрона, но также вызывает проблему. Это также уменьшило тягу двигателя 1. Теперь результирующая восходящая сила не равна силе гравитации, и квадрокоптер опускается.
Также тяга двигателя квадрокоптера не одинакова, поэтому квадрокоптер становится неуравновешенным. Квадрокоптер опрокинется вниз в сторону двигателя 1.
Квадрокоптер опрокинется вниз в сторону двигателя 1.
Для вращения дрона без создания вышеуказанных дисбалансов необходимо уменьшение скорости вращения двигателей 1 и 3 с увеличением скорости вращения роторов 2 и 4.
Угловой момент роторов по-прежнему не равен нулю, поэтому корпус дрона должен вращаться. Однако общая сила остается равной силе гравитации, и дрон продолжает зависать. Поскольку нижние упорные винты расположены по диагонали друг от друга, дрон все еще может оставаться сбалансированным.
Объявление: Проверьте это превосходное предложение DJI Mavic 2 Zoom на Amazon.
Направление винта квадрокоптера для тангажа и крена
Поскольку большинство квадрокоптеров симметричны (например, DJI Phantom 4 Pro V2, Autel X-Star и дрон Holy Stone HS 100), нет никакой разницы между движением вперед или назад. То же самое и с движением из стороны в сторону. Как лететь вперед также объясняет, как лететь назад или вбок.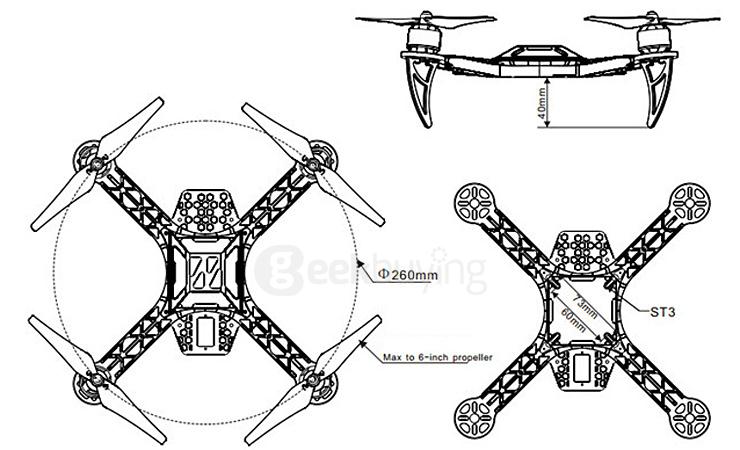
Чтобы лететь вперед, необходимо увеличить обороты двигателя квадрокоптера (скорость вращения) роторов 3 и 4 (задние двигатели) и уменьшить скорость вращения роторов 1 и 2 (передние двигатели). Суммарная сила тяги останется равной весу, поэтому дрон останется на том же вертикальном уровне.
Кроме того, поскольку один из задних роторов вращается против часовой стрелки, а другой по часовой стрелке, увеличенное вращение этих двигателей по-прежнему будет производить нулевой угловой момент. То же самое относится и к передним роторам, поэтому дрон не вращается.
Однако большая сила в задней части дрона означает, что он будет наклоняться вперед. Теперь небольшое увеличение тяги для всех роторов создаст результирующую силу тяги, которая имеет компонент для балансировки веса вместе с компонентом поступательного движения.
Видео о том, как работает квадрокоптер
Вот отличное видео, которое очень доступно объясняет, как работает и летает квадрокоптер.
В следующем видео обсуждается направление двигателя квадрокоптера.
Как работают двигатели квадрокоптера
Выше мы обсуждали, как работают двигатели и пропеллеры квадрокоптера. Вот некоторая дополнительная информация о двигателях для квадрокоптеров с учетом последних разработок и инноваций в технологии двигателей, а также ведущих брендов.
Бесколлекторные двигатели для квадрокоптеров
Почти все квадрокоптеры, выпущенные за последние несколько лет и будущие, используют бесколлекторные электродвигатели. Бесщеточные двигатели квадрокоптера более эффективны, надежны и тише, чем щеточные двигатели. Тип двигателя и его конструкция очень важны. Более эффективный двигатель означает меньший расход заряда батареи и большее время полета.
Более эффективный двигатель означает меньший расход заряда батареи и большее время полета.
Стабильность очень важна для квадрокоптера, поэтому верхние двигатели производят очень небольшую вибрацию двигателя, а это означает, что контроллеру полета требуется меньше усилий для поддержания устойчивости квадрокоптера.
Вот 2 отличные статьи, в которых рассказывается все о бесколлекторных двигателях и о том, как выбрать двигатель для квадрокоптера.
- Бесколлекторные двигатели и принципы их работы
- Как выбрать двигатели для квадрокоптера
По часовой стрелке (CW) и против часовой стрелки (CCW) Направление вращения двигателя
У квадрокоптера должно быть 4 двигателя. Чтобы квадрокоптер был сбалансирован, вращение пропеллера должно быть направлено к основному корпусу квадрокоптера. Для этого вам необходимо настроить двигатель квадрокоптера следующим образом:
- Передний левый — двигатель по часовой стрелке (CW)
- Передний правый — двигатель против часовой стрелки (против часовой стрелки)
- Задний левый — двигатель против часовой стрелки (CCW)
- Задний правый — двигатель по часовой стрелке (CW)
Примечание: Убедитесь, что гребные винты на двигателях расположены правильно. Вы хотите установить пропеллер против часовой стрелки на двигатели против часовой стрелки и т. д.
Вы хотите установить пропеллер против часовой стрелки на двигатели против часовой стрелки и т. д.
Марки двигателей квадрокоптеров
Компания DJI — двигатели, регуляторы скорости и пропеллеры
В настоящее время DJI является крупнейшим производителем потребительских и профессиональных мультикоптеров. Они поставляют на рынок 70% дронов. Они также производят отличный ассортимент стабилизаторов и камер Zenmuse.
В последние годы они производят первоклассные двигатели для квадрокоптеров и мультикоптеров для собственных дронов, а также силовые установки, которые каждый может купить и использовать для создания собственного БПЛА.
Новейшие мультикоптерные двигатели от DJI: E5000, E2000, Snail и E305.
Все их новейшие двигатели или силовые установки содержат двигатель квадрокоптера, винты, электронные схемы управления скоростью и систему охлаждения. Двигатель DJI E5000 и большинство других двигателей защищены от дождя.
Теперь мы видим, как квадрокоптеры используются на фермах для обследования земли, заборов и зданий, а также для наблюдения за посевами. Мультикоптеры также можно использовать для опрыскивания сельскохозяйственных культур с помощью квадрокоптера DJI MG-1S, специально созданного для этой цели. При опрыскивании сельскохозяйственных культур важно иметь герметичный двигатель.
Компания T-Motor — двигатели, регуляторы скорости и пропеллеры
Также известна как Tiger Motor, производящая передовые силовые установки для БПЛА. Они специализируются на двигателях, ESC и пропеллерах. T-Motor производит двигатели для квадрокоптеров высочайшего качества, которые широко используются для аэрофотосъемки, промышленного, сельскохозяйственного и коммерческого применения.
Двигатели от T-Motor
T-Motor Модельный ряд из 32 двигателей:
- 4 ЕВ Мощность
- 4 U Эффективный тип
- 4 двигателя типа P
- 8 Тип навигации
- 4 FPV типа
- 4 Антигравитационный
- 4 Тип карданного подвеса
Электронные регуляторы скорости T-Motor
T-Motor имеет 17 следующих типов цепей ESC;
- 4 Серия Альфа
- Серия 4 пламени
- 3 Воздушная серия
- 4 серии FPV
- 2 серии T
Схемы ESC действительно высокого качества. Давайте кратко рассмотрим функции T-Motor Alpha 40A LV ESC.
Давайте кратко рассмотрим функции T-Motor Alpha 40A LV ESC.
Alpha 40A LV — это регулятор скорости с низким уровнем шума, температуры и помех, который очень быстро реагирует.
Технология Field Oriented Control (FOC) – принцип FOC заключается в управлении выходной мощностью двигателя посредством регулировки тока и угла, которые управляют магнитным полем и крутящим моментом двигателя.
Серия T-Motor Alpha содержит следующие интеллектуальные функции и средства защиты двигателя;
- Защита от короткого замыкания
- Защита от перегрузки по току
- Защита от потери дроссельной заслонки
- Защита двигателя от блокировки
- Защита от низкого напряжения
- Антикоррозийный
- Пыленепроницаемый и водонепроницаемый
- Нанопокрытие
- Сверхлегкий корпус
- Эффективное охлаждение
Пропеллеры T-Motor
Ассортимент пропеллеров T-Motor огромен: FPV, ультралегкие, полированные, складные из пластика и углеродного волокна различных размеров.
Калькулятор тяги двигателя квадрокоптера
Вот статья, в которой показано, как рассчитать тягу двигателя квадрокоптера с помощью математической формулы.
В Интернете также есть несколько калькуляторов тяги двигателя квадрокоптера. Вот 3 наиболее часто используемых калькулятора тяги и подъемной силы квадрокоптера;
- Калькулятор тяги мультикоптера eCalc
- Калькулятор подъема квадрокоптера DriveCalc
- Калькулятор тяги GoBrushless
Конструкция пропеллера квадрокоптера
Объяснение размера пропеллера
Пропеллеры для квадрокоптеров изготавливаются из самых разных материалов, размеров и цен, начиная с нижнего и заканчивая верхним диапазоном. Как правило, более дешевые опоры менее точно изготовлены и более подвержены вибрации.
Это особенно относится к относительно большей части спектра винта, при этом различия становятся менее заметными для небольших судов.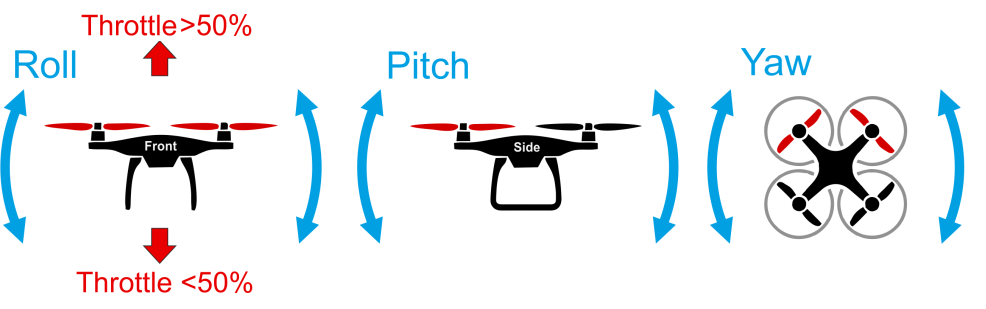 Если вы летите на квадрокоптере с намерением делать качественные аэрофотоснимки или фильмы, то стоит потратиться на пропеллеры высшего качества. Кроме того, используйте качественный Prop Balancer, чтобы проверять пропеллеры вашего квадрокоптера каждые несколько полетов.
Если вы летите на квадрокоптере с намерением делать качественные аэрофотоснимки или фильмы, то стоит потратиться на пропеллеры высшего качества. Кроме того, используйте качественный Prop Balancer, чтобы проверять пропеллеры вашего квадрокоптера каждые несколько полетов.
Есть три простых измерения, которые следует учитывать при выборе пропеллеров, если вы проектируете или хотите улучшить свой квадрокоптер.
Длина – Первая – длина (диаметр), обычно указывается в дюймах. Длина винта – это диаметр диска, который образует винт при вращении.
Чем выше номинальное значение Kv ваших двигателей, тем меньше должны быть винты. Меньшие винты обеспечивают большую скорость, но снижают эффективность. Большую пропеллерную установку (с соответственно двигателями с низким Kv) легче стабильно летать. Он также потребляет меньше тока и поднимает больший вес.
Если вы собираете квадрокоптер, лучший способ определить правильный диапазон для моторов и пропеллеров — обратиться к рекомендациям производителя.
Шаг стойки – Это второе измерение также очень важно. Размеры винта указаны в виде 21 x 7,0 дюймов (533 x 178 мм), что соответствует системе движения DJI E2000. Первая цифра относится к длине винта, как указано выше. Второй — шаг, определяемый как расстояние, на которое винт будет проталкиваться вперед через твердое тело за один полный оборот. Например, этот гребной винт с шагом 7,0 дюймов будет двигаться вперед на 7,0 дюймов за один оборот.
Отверстие — Последнее известно как измерение диаметра, которое представляет собой просто размер отверстия в центре опоры. Это должно быть согласовано с валом выбранных вами двигателей. Имеются адаптеры для уменьшения диаметра отверстия винта. В качестве альтернативы, некоторые винты, например, производимые T-Motor, используют систему прямого крепления, при которой винты крепят винты непосредственно к головке двигателя.
Самоблокирующийся — Большинство современных квадрокоптеров используют самоблокирующиеся винты. Они называют это «самоблокирующимся», потому что на квадрокоптере 2 двигателя вращаются по часовой стрелке, а другие 2 вращаются против часовой стрелки. Используя резьбу пропеллера, противоположную направлению вращения двигателя, пропеллеры автоматически блокируются и не расшатываются во время полета.
Они называют это «самоблокирующимся», потому что на квадрокоптере 2 двигателя вращаются по часовой стрелке, а другие 2 вращаются против часовой стрелки. Используя резьбу пропеллера, противоположную направлению вращения двигателя, пропеллеры автоматически блокируются и не расшатываются во время полета.
Пропеллеры для квадрокоптера большого или меньшего размера
Чем больше шаг, тем выше тяга и необходимая мощность двигателя. Обычно в мультикоптерах используются винты с шагом от 3 до 5 дюймов. Более низкие частоты более эффективны. Чем больше опора (либо увеличивающийся диаметр, либо шаг, либо и то, и другое), тем больше энергии требуется для ее вращения. Тем не менее, больший винт или большая длина шага увеличат скорость вашего самолета, но также потреблят больше энергии.
Вообще говоря, винт с меньшим диаметром или шагом может вращаться быстрее (более высокие обороты), потому что двигателю не нужно прилагать столько усилий, чтобы вращать его, поэтому он потребляет меньший ток. Они, как правило, работают более плавно и чувствуют себя более отзывчивыми на клюшки. Более быстрое изменение числа оборотов из-за меньшей инерции помогает стабильности квадрокоптера.
Они, как правило, работают более плавно и чувствуют себя более отзывчивыми на клюшки. Более быстрое изменение числа оборотов из-за меньшей инерции помогает стабильности квадрокоптера.
Пропеллеры по часовой стрелке (CW) и против часовой стрелки (CCW)
Квадрокоптер поставляется с 4 пропеллерами, причем пропеллеры для вращения по часовой стрелке и против часовой стрелки имеют разную конструкцию. Когда вы покупаете или просматриваете гребные винты, вы прочитаете о CW, что означает вращение по часовой стрелке, и CCW, что означает вращение гребных винтов против часовой стрелки.
Следовательно, для создания тяги необходимы соответствующие пропеллеры CCW и CW, а также противоположное движение по рысканию, которое компенсирует друг друга в полете. Чтобы узнать больше о пропеллерах для квадрокоптера, вот хорошая статья под названием «Как выбрать пропеллеры для мини-квадрокоптера».
На изображении ниже показаны винты квадрокоптера DJI Mavic Pro по часовой и против часовой стрелки. Оба отмечены «8330F», что является реквизитом по умолчанию, поставляемым с Mavic Pro. Однако на винте CW он фактически помечен как «8330F CW». Так что хорошо бы внимательно посмотреть на ваши реквизиты, чтобы узнать, являются ли они CW или CCW.
Оба отмечены «8330F», что является реквизитом по умолчанию, поставляемым с Mavic Pro. Однако на винте CW он фактически помечен как «8330F CW». Так что хорошо бы внимательно посмотреть на ваши реквизиты, чтобы узнать, являются ли они CW или CCW.
Материал пропеллера квадрокоптера
Материал пропеллера квадрокоптера, как правило, пластик или углеродное волокно. Однако вы также можете купить деревянные пропеллеры, которые вы обычно видите в секторе авиамоделей.
Как выбрать лучший пропеллер для квадрокоптера
Далее представлено потрясающее видео, которое поможет вам выбрать лучший пропеллер. Действительно есть над чем подумать.
Понимание вращения двигателя и пропеллера квадрокоптера
Направление двигателя квадрокоптера
Существует 2 направления вращения пропеллера: «Пропеллер наружу» и «Пропеллер внутрь». Оба имеют свои плюсы и минусы. Традиционное направление — «Props-in», и оно используется по умолчанию для всех современных прошивок. Это также стандарт для всех мультикоптеров.
Оба имеют свои плюсы и минусы. Традиционное направление — «Props-in», и оно используется по умолчанию для всех современных прошивок. Это также стандарт для всех мультикоптеров.
Конфигурация с реквизитом
Конфигурация без реквизита
Конфигурация без реквизита с большинством плюсов для 3-дюймовых квадрокоптеров и меньше, по крайней мере, когда вы фокусируетесь на заметных летных характеристиках. Это становится совершенно очевидным, когда вы делаете крутой поворот;
Конфигурация вращения «Пропеллер внутрь», резкий поворот вызывает внезапное падение и подъем точно так же, как и при тупом повороте на 90° из-за турбулентности при вращении по рысканию. У всех более ранних кораблей с криком была эта проблема, пока не было найдено решение: обратное вращение («опрокидывание»).
Related Posts
За исключением аэродинамических преимуществ в небольших (от 3 до 3 дюймов) катерах, хорошей идеей будет установить направление «Props-out» для FPV-камеры.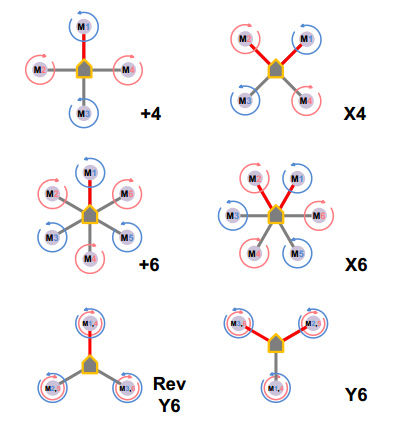 Вероятность повреждения и испачкания во время аварии меньше. Это связано с тем, что пропеллеры вращаются от камеры, поэтому пыль, грязь, трава, листья и т. д. отбрасываются от нее в сторону обода корабля.
Вероятность повреждения и испачкания во время аварии меньше. Это связано с тем, что пропеллеры вращаются от камеры, поэтому пыль, грязь, трава, листья и т. д. отбрасываются от нее в сторону обода корабля.
Конфигурация «Props-out» также отлично подходит для полетов в помещении — если вы ударитесь о стену, аппарат отскочит назад из-за направления вращения пропеллера. Если вы решите летать в лесу, листья и ветки не будут засасываться, и это не приведет к падению.
«Props-in» сделает именно это — нарисует все ветки и листья в радиусе пропеллера. Это означает, что выбраться из щекотливой ситуации будет не очень легко, если вообще возможно. Во время гонки маловероятно, что ваш дрон поймает поворотный флажок или верхнюю планку ворот. Он просто отскочит и продолжит полет без каких-либо проблем.
Конфигурация «Props-out» теоретически может быть немного более эффективной по сравнению с традиционной «Props-in». Винты, вращающиеся в противоположном направлении, изменяют положение центра тяги внутрь (к центру корабля). Вот почему турбулентность не такая сильная на задней части квадрокоптера.
Вот почему турбулентность не такая сильная на задней части квадрокоптера.
Учитывая, что квадрокоптер при полете по прямой всегда имеет переднюю часть немного ниже по сравнению с задней частью летательного аппарата, передние пропеллеры не создают турбулентность для задних пропеллеров, потому что они расположены ниже, чем задняя часть те. При наведении обе конфигурации идентичны, и вы не заметите разницы.
Минусы конфигурации «Props-out» совершенно очевидны при работе с большими кораблями (более 4 дюймов) — большое количество пыли и частиц в воздухе будет достигать середины бортов корабля, особенно если у вас есть «настоящий X». рамка на руках. Это может привести к повреждению USB-порта и других разъемов, расположенных в средней части корпуса. Хорошим решением для этого являются заглушки USB (и других разъемов), которые защищают порты от пыли.
Не забывайте о функции «Перевернуть после падения». В этом случае, в отличие от конфигурации «Props-in», пропеллеры будут вращаться в направлении камеры (в этот момент корабль перевернут). Учитывая, что пропеллеры находятся прямо на земле, пыль, грязь, грязь и т. д. будут закрывать объектив камеры, что может затруднить полет после того, как вы вернетесь в правильное положение. В конфигурации «Props-in» это не так. Вся грязь будет отходить от центра рамы.
Учитывая, что пропеллеры находятся прямо на земле, пыль, грязь, грязь и т. д. будут закрывать объектив камеры, что может затруднить полет после того, как вы вернетесь в правильное положение. В конфигурации «Props-in» это не так. Вся грязь будет отходить от центра рамы.
Для установки конфигурации «Props-out» необходимо изменить направление вращения каждого двигателя. Это можно сделать в программе BLHeli Suite, в функции «Motor Direction». Вы установите два «реверсивных» двигателя на «нормальный», а «нормальный» — на «реверсивный».
Далее вы настроите все двигатели на «реверс» в Betaflight Configurator. Нажав «Сохранить и перезагрузить», вы сохраняете конфигурацию и активируете «Props-out» конфиг.
Единственное, что осталось сделать, это переключить винты — вы устанавливаете винты против часовой стрелки в положение по часовой стрелке, а по часовой стрелке в положение против часовой стрелки.
Как соединить моторы с пропеллерами для скорости или эффективности?
Короче говоря: по размеру кадра.
Вы всегда должны подбирать пропеллеры (их диаметр) по размеру рамы — максимально допустимому диаметру относительно рамы. Чем большую поверхность они покрывают (не касаясь противоположных гребных винтов), тем они эффективнее. Это связано с тем, что площадь, не покрытая гребными винтами, меньше — эффективность относится к площади гребных винтов (A = πr2). Даже небольшое увеличение диаметра может иметь большое значение и сделать коптер более эффективным. Следующим шагом является выбор двигателей в отношении гребных винтов.
Выбрать правильную комбинацию двигатель/пропеллер не так просто, как кажется. Еще больше усложняет ситуацию тот факт, что большинство производителей не предоставляют информацию обо всех типах гребных винтов, которые можно установить на их двигатель. Это означает еще больше неизвестных переменных в этой «математике» идеальной комбинации двигателя и винта. Здесь вам могут помочь проверенные комбинации двигатель/пропеллер (идентичные или похожие) или рейтинги пропеллера/тяги.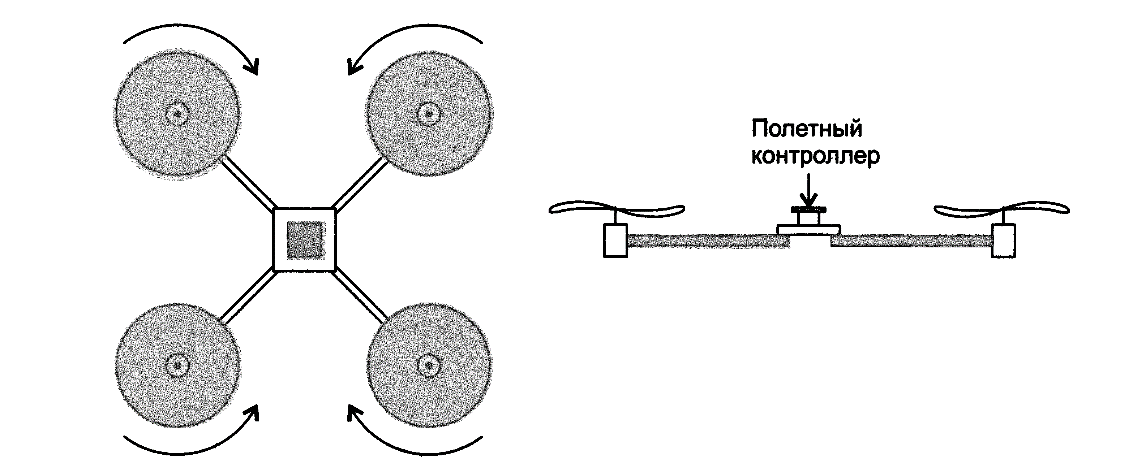
Гребные винты
В целом, говоря о гребных винтах: маневренность корабля зависит от того, насколько быстро он может изменять тягу — насколько быстро вы можете изменить число оборотов (количество оборотов) гребных винтов.
Легче изменить ускорение для меньших пропеллеров; большим требуется больше времени для этого. Слишком много времени на ускорение/торможение, и вы не сможете летать. Вот почему вы можете увидеть меньшие пропеллеры на гексакоптерах и октокоптерах по сравнению с гигантскими пропеллерами квадрокоптера.
Здесь также важен шаг винта. Мы измеряем его в дюймах, и он представляет собой расстояние по вертикальной оси, которое требуется пропеллеру, чтобы сделать полный круг при вращении (в идеальных условиях). При маркировке гребного винта, например, цифрой «5145»: 51 означает диаметр 5,1 дюйма и шаг 4,5 дюйма. Если вы хотите лететь быстрее, шаг винта должен быть более агрессивным. Если вы планируете придерживаться скорости зависания (для видеосъемки, медленного кружения…), вам понадобится наименьший возможный шаг винта.
В заключение: скорость (точнее, назначение корабля) напрямую связана с шагом винта.
Двигатели
На практике вы выбираете двигатель в зависимости от типа гребного винта. Если вы установите слишком большой двигатель, он будет слишком тяжелым, а слишком маленький будет недостаточно эффективен и, скорее всего, сгорит.
Меньшие пропеллеры требуют более высоких оборотов двигателя; им нужно вращаться быстрее, чтобы создать достаточно сильную тягу, чтобы иметь возможность летать.
Резюме
Учитывая все обстоятельства, эффективное судно имеет оптимальный размер двигателя с низкими оборотами и большими винтами. Acro quad потребуются меньшие, более агрессивные пропеллеры, более быстрые двигатели и немного более высокое напряжение для более быстрого отклика дроссельной заслонки.
Шансы найти все комбинации кривых крутящего момента в радиоуправляемых двигателях очень малы. Легче узнать номинальную тягу/пропеллер в сочетании с различными размерами пропеллера, что очень полезно при расчете того, как быстро вы сможете поднять летательный аппарат и как долго вы будете на нем летать.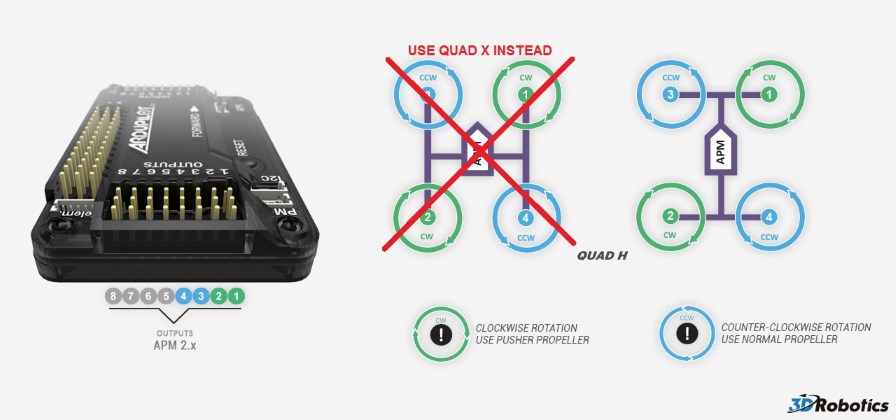
Как правило, отношение тяги к весу должно быть 2:1 для стандартного квадрокоптера и 5:1 для акро/гоночного квадрокоптера. Только для зависания (граница доступности) минимум 1,8:1.
Вот пример: у нас есть летательный аппарат с 1 кг AUW (полный вес), общая тяга, создаваемая двигателями на полном газу, должна составлять 2 кг (минимум 500 г тяги на двигатель — если речь идет о квадроцикле).
Чистокровные гонщики имеют тяговооруженность более 5:1, а то и 8:1 (иногда даже брутальные 10:1). Эти соотношения полезны для крутых поворотов, безумного ускорения и крутых поворотов. Мы должны подчеркнуть, что ремесла с этими пайками ужасно трудно контролировать, и вам нужно много практики, чтобы быть в состоянии это сделать. Если вы ищете медленно летающий и записывающий самолет, вам понадобится соотношение тяги к весу примерно 3:1 или 4:1. Эта сборка обеспечивает сверхточное управление и оставляет достаточно места для полезной нагрузки (камеры и т. д.) или более тяжелых батарей, если вы хотите увеличить время полета.
Заключение
В заключение, чтобы правильно определить КПД двигателя, отправной точкой всегда является рама.
Размер рамы -> Размер пропеллера -> Размер двигателя (и Kv)
Несмотря на то, что многие люди делают по-разному, в зависимости от их потребностей, пропорций пропеллера, двигателя и Kv двигателя, эту удобную таблицу можно отличная ссылка на то, какое комбо лучше всего иметь в зависимости от размера кадра.
Frame size | prop size | motor size | Motor Kv | |||
|---|---|---|---|---|---|---|
150mm or less | 3“ or smaller | 1306 или меньше | 3000 кВ или выше | |||
180 мм | 4 ” | 9000 1806 1806 19063 9063 7 9000 1806 1806 1806 1806 1 | 93 9063 9000 9000 2 | 9000 2 | 2600Kv | |
210mm | 5″ | 2204-2206 | 2300Kv-2600Kv | |||
250mm | 6″ | 2204- 2208 | 2000KV-2300KV | |||
350 мм | 7 « | 2208 77777777777777777777777777777777777777777777777777777777777777777777777777777777777777770542 | 450mm | 8“, 9“, 10“ | 2212 or bigger | 1000Kv or lower |
If you want to be fully precise when calculating efficiency, you can use старый, но хороший онлайн-калькулятор eCalc.
Похожие записи
-

 Блок питания управления: Блок питания и блок управления
Блок питания управления: Блок питания и блок управления - Бриз ппм 88: Лицевая часть БРИЗ-4301М (ППМ-88) для комплектования гражданских противогазов
- Автоклав давление: Температура и давление в домашнем автоклаве: какие нужно соблюдать параметры?
- Аварийный фонарь в машину: Ліхтарик RG 813 аварійний ліхтар для авто з магнітом і гачком: продажа, ціна в Києві. ProductCategory. caption від «MegaHertz — Інтернет магазин електроніки»