Блок питания управления: Блок питания и блок управления
Содержание
Блок питания и блок управления
- Подробности
- Категория: Подвижной состав
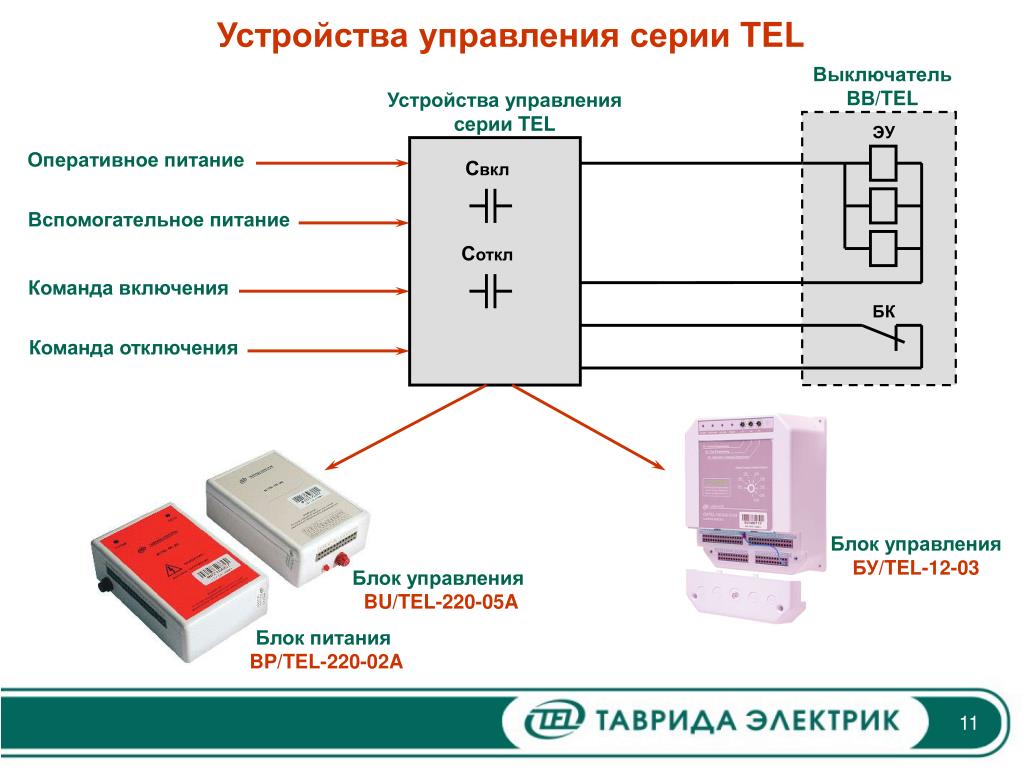
Источником постоянного и переменного токов на пассажирских локомотивах являются блоки питания с полупроводниковыми преобразователями и малогабаритными аккумуляторными батареями, а с 1978 г. — статические преобразователи на тиристорах. Для электрического управления ЭПТ и контроля состояния цепей управления применяется блок управления, который комплектуется на локомотиве с блоком питания или преобразователем и получает напряжение через контроллер крана машиниста № 395.
Таблица 1. Технические данные источников питания электропневматического тормоза
| Наименование параметра | Блок питания БП-ЭПТ-П № 579-00-35 (рис. 214) | Статический преобразователь ПТ-ЭПТ-П № 553-00-35 (рис. 215) |
Напряжение, В: питания на входе | 50-52 | 50 — 52 на электровозах, 66 — 75 или 110 — 120 на тепловозах |
постоянного тока на выходе | 50 — 55 | Не менее 50 |
переменного тока на выходе | 50 | » » 52 |
Ток нагрузки на выходе, А: постоянный | До 7 | 8 |
переменный | 0. | 0,6 |
Частота переменного тока, Гц | 625±15 | 625± 15 |
Габаритные размеры, мм | 512X282X548 | 385X175X320 |
Масса, кг, не более | 53 | 16 |
 5
5Примечания.
1. Преобразователи ПТ-ЭПТ-П выпускают трех видов: ПТ-ЭПТ-50 — для установки на электровозах, ПТ-ЭПТ-75 и ПТ-ЭПТ-110У — для установки на тепловозах.
2. Электрическая схема фильтра Ф-ПТ приведена на рис. 216.
Рис. 214. Принципиальная электрическая схема блока питания БП-ЭПТ-П № 579-00-35
Таблица 2. Характеристика элементов источников питания
| Обозначение схеме | Наименование | БП-ЭПТ-П № 579-00-35 (см. | ПТ-ЭПТ-П № 553-00-35 (см. рис. 215) |
Тр1 | Транс | Обмотка; 1 — 2 360 витков, 2 — 3 800 витков, 4 — 5 36 витков; провод ПЭЛ диаметром 0,31 мм; 6 — 7, 7 — 8 — провод ПЭЛШКО диаметром 0,31 мм, 36X2 витков | Тип 644-27-41 — 01, обмотка 1 — 2 380 витков, 2 — 3 960 витков, 4 — 5 40 витков, 6 — 7, 7 — 8 20 витков, 9 — 10 25 витков, 10 — 11 75 витков, 11 — 12 50 витков; провод ПЭВ-2 диаметром 0,29 мм |
 рис. 214)
рис. 214)Рис. 215. Принципиальная электрическая схема статического преобразователя ПТ-ЭПТ-П
Рис. 216. Электрическая схема фильтра Ф-ПТ:
1 — конденсаторы; 2 — дроссель
Таблица 3. Характеристика реле, конденсаторов, выпрямителей и резисторов блока управления БУ-ЭПТ № 579-00-20
Обозначение на схеме (рис. 217) 217) | Наименование | Тип реле | Характеристика |
к | Сильноточное реле | РКС-3 | Сопротивление катушки 800 Ом ± ±10% с контактами на размыкание тока 20 А индуктивной нагрузки; рабочее напряжение 50 В |
ТР | Тормозное реле | КДР1 — М | Сопротивление катушки 280 Ом ± ±10% с контактами на протекание постоянного тока 10 А без размыкания цепи; рабочее напряжение 50 В |
ПР | Реле перекрыши | КДР1 — М | Сопротивление катушки 280 Ом ± ±10% с контактами на протекание постоянного тока 10 А без размыкания цепи; рабочее напряжение 50 В |
КР | Контрольное реле | КДР1 — М | Сопротивление катушки 650 Ом ± ±10%; напряжение 50 В |
R1, R2 | Ограничительные | пэ | 15 Вт; 30 Ом ±5% |
R3 | Защитный резистор | пэ | 50 Вт; 50 Ом ± 5% |
Сш | Шунтирующий | МБГП | Емкость 0,25 мкФ, напряжение 400 В |
Сз | Конденсатор замедления | кэг | Емкость 200 мкФ, напряжение 50 В |
вк | Выпрямитель контрольного реле | Диоды | По одному диоду в каждом плече моста |
примечания. 1. В таблице приведены данные для преобразователей ПТ-ЭПТ-50, устанавливаемых на электровозах. В схемах преобразователей для тепловозов устанавливают дополнительные резисторы для снижения питающего напряжения с 75 или 110 до 52 В, а также изменяются отдельные характеристики элементов.
1. В таблице приведены данные для преобразователей ПТ-ЭПТ-50, устанавливаемых на электровозах. В схемах преобразователей для тепловозов устанавливают дополнительные резисторы для снижения питающего напряжения с 75 или 110 до 52 В, а также изменяются отдельные характеристики элементов.
2. Преобразователи на тиристорах для устранения помех радиоприему на локомотивах, возникающих при их работе, оборудуют фильтрами Ф-ПТ (см. рис. 216). Фильтр выполнен в виде приставки к преобразователю и представляет собой блок, в котором размещен дроссель индуктивностью 900 мкГд и шесть конденсаторов с суммарной емкостью 1200 мкФ.
Рис. 217. Электрическая схема блока управления БУ-ЭПТ № 579-00-20
Таблица 4. Характеристика реле, применяемых в ЭПТ
Примечание. ПР — перекрыта; ТР — тормозное; КР — контрольное; К· — сильноточное.
- Назад
- Вперёд
© 2009-2023 — lokomo.ru, железные дороги.
Блоки питания и управления БПУ, БПУ-М
Блок питания и управления «Гамма-01 БПУ» (рис. 4) предназначен для обеспечения бесперебойного электропитания блоков и модулей прибора. В двухуровневых системах БПУ выполняет функции периферийного контроллера, обеспечивая передачу информации по линиям связи верхнего и нижнего уровня.
4) предназначен для обеспечения бесперебойного электропитания блоков и модулей прибора. В двухуровневых системах БПУ выполняет функции периферийного контроллера, обеспечивая передачу информации по линиям связи верхнего и нижнего уровня.
БПУ содержит в себе импульсный преобразователь питания (переменное напряжение 220 В — постоянное напряжение 28 В), два аккумулятора 12 В емкостью 7 А•ч, соединенных последовательно, работающих в буферном режиме и электронный модуль питания и управления МПУ с двумя интерфейсными входами. Для специального применения может устанавливаться преобразователь питания на другое входное напряжение, соответствующее требованиям объекта.
Блок БПУ-М отличается наличием герметичных кабельных вводов, дополнительных фильтров на линиях питания и связи, что повышает степень защищенности прибора, и возможностью работы от двух источников напряжения одновременно.
| Входное напряжение (внешний источник питания): | ||
| переменный ток однофазный: | ||
| напряжение, В | 220 -33 +22 | |
| частота, Гц | 50±1 | |
| потребляемый ток, А | 1,0 не более | |
| постоянный ток (для БПУ-М): | ||
| напряжение, В | 24±4 | |
| потребляемый ток, А | 2,0 не более | |
| Характеристика встроенных аккумуляторов: | ||
| количество, шт | 2 | |
| номинальное напряжение одного аккумулятора, В | 12 | |
| емкость, А•ч | 7, не менее | |
| выходное напряжение, В | 24±4 | |
| Время работы приборов от аккумуляторов БПУ, ч: | ||
| в дежурном режиме: | ||
| при суммарном токе потребления 80 мА | 72, не менее | |
| при суммарном токе потребления 120 мА | 48, не менее | |
| при суммарном токе потребления 240 мА | 24, не менее | |
| Диапазон рабочих температур, оС | от минус10 до плюс 50 | |
| Вид климатического исполнения по ГОСТ 15150: | ||
| БПУ | УХЛ 3. 1 1 | |
| БПУ-М | ОМ4 | |
| Степень защиты блока питания, обеспечиваемая оболочкой, по ГОСТ 14254: | ||
| БПУ | IР44 | |
| БПУ-М | IP55 | |
| Габаритные размеры, мм: | ||
| БПУ | 278х188х130 | |
| БПУ-М | 325х278х145 | |
| Масса, кг: | ||
| БПУ | 4, не более | |
| БПУ-М | 9,3, не более | |
| Cрок службы, лет | 10, не менее | |
Количество блоков питания и схема их соединения в каждом случае определяется проектной документацией. Схемы электрических подключений блоков питания приведены в паспортах.
Схемы электрических подключений блоков питания приведены в паспортах.
Обозначение при заказе:
- Блок питания и управления «Гамма-01 БПУ»
- Блок питания и управления БПУ-М
Документация (*.pdf)
|
Методы управления источниками питания — Советы по силовой электронике
Управление источниками питания эволюционировало от примитивного феррорезонансного регулирования и линейных источников питания до простого гистерезисного управления, аналогового управления в режиме напряжения, аналогового управления в режиме тока, а теперь и различных подходов к цифровому управлению. По сравнению с импульсными источниками питания выходной сигнал феррорезонансных конструкций регулируется не так точно, в то время как линейное регулирование может обеспечить очень точно регулируемый выходной сигнал с очень низким уровнем шума. Феррорезонансные и линейные источники питания намного проще, но менее эффективны, чем импульсные конструкции. Различные методы управления с переключением режимов в большинстве электронных систем обеспечивают наилучшее сочетание высокой эффективности и регулирования мощности.
Феррорезонансные и линейные источники питания намного проще, но менее эффективны, чем импульсные конструкции. Различные методы управления с переключением режимов в большинстве электронных систем обеспечивают наилучшее сочетание высокой эффективности и регулирования мощности.
Феррорезонансное управление — это технология на основе трансформатора, в которой используются нелинейные магнитные свойства и резонансный контур для обеспечения стабильного выходного напряжения при колебаниях входного напряжения до ±40%. Феррорезонансные источники питания устойчивы к воздействию окружающей среды, по своей природе ограничивают ток и поглощают большинство переходных процессов, вызванных линией электропередачи. До распространения технологии импульсного режима феррорезонансные источники питания были основным источником питания -48 В постоянного тока в каждом центральном телекоммуникационном офисе.
Феррорезонансный трансформатор состоит из вспомогательной вторичной обмотки с параллельным емкостным баком для обеспечения резонансного контура на частоте питающего напряжения (рисунок 1) . Регулирование является результатом характеристик насыщения железного сердечника трансформатора вместе с резонансным LC-контуром на том же сердечнике. Резонансный контур может поддерживать выходное напряжение в течение нескольких миллисекунд, если входной переменный ток изменяется или пропадает. Резонансный контур также действует как фильтр для подавления гармоник, создаваемых насыщением сердечника.
Регулирование является результатом характеристик насыщения железного сердечника трансформатора вместе с резонансным LC-контуром на том же сердечнике. Резонансный контур может поддерживать выходное напряжение в течение нескольких миллисекунд, если входной переменный ток изменяется или пропадает. Резонансный контур также действует как фильтр для подавления гармоник, создаваемых насыщением сердечника.
Рис. 1. Феррорезонансное регулирование — это метод управления на основе трансформатора, основанный на нелинейных свойствах резонансного LC-контура. (Изображение: Sunpower Electronics)
Линейные регуляторы
Подобно феррорезонансным конструкциям, линейные регуляторы (линейные регуляторы) представляют собой неэффективную диссипативную технологию. Базовая линейка состоит из проходного транзистора, используемого для регулирования выходного напряжения (рис. 2) . Управление осуществляется с помощью обратной связи от резистивного делителя, измеряющего выходное напряжение. Напряжение обратной связи сравнивается с опорным напряжением в усилителе ошибки. Выход усилителя ошибки управляет проходным транзистором. Усилитель ошибки постоянно регулирует свое выходное напряжение (и ток через проходной транзистор), чтобы заставить напряжение обратной связи равняться опорному напряжению.
Напряжение обратной связи сравнивается с опорным напряжением в усилителе ошибки. Выход усилителя ошибки управляет проходным транзистором. Усилитель ошибки постоянно регулирует свое выходное напряжение (и ток через проходной транзистор), чтобы заставить напряжение обратной связи равняться опорному напряжению.
Рисунок 2. Линейное управление реализовано с помощью выходного транзистора, усилителя ошибки и опорного напряжения, которое сравнивается с сигналом обратной связи, полученным от внешнего делителя напряжения (R1 и R2) (Изображение: ROHM Semiconductor)
важная спецификация для линеаров. Минимальное падение напряжения требуется на регуляторе для поддержания регулирования выходного напряжения. Существует три основных типа конструкций линейных регуляторов:
- Стандартный линейный (NPN Darlington, управляемый транзистором PNP), падение напряжения до 3 В
- Линейный с малым падением напряжения (LDO), падение напряжения от 1 В до 2 В с выходным транзистором NPN, 0,7 В или менее с выходным транзистором PNP или MOSFET
- Quasi LDO с падением напряжения от 0,9 до 1,5 В
Стандартные линейные преобразователи лучше всего подходят для приложений с питанием от сети переменного тока, где требуется низкая стоимость и относительно большой ток нагрузки. LDO лучше всего подходят для приложений с батарейным питанием, потому что более низкое падение напряжения напрямую приводит к экономии средств и увеличению срока службы батареи. Независимо от напряжения падения все линейные стабилизаторы являются понижающими стабилизаторами (таблица 1). Импульсное управление требуется для реализации повышающего, понижающего/повышающего или инвертирующего преобразования мощности.
LDO лучше всего подходят для приложений с батарейным питанием, потому что более низкое падение напряжения напрямую приводит к экономии средств и увеличению срока службы батареи. Независимо от напряжения падения все линейные стабилизаторы являются понижающими стабилизаторами (таблица 1). Импульсное управление требуется для реализации повышающего, понижающего/повышающего или инвертирующего преобразования мощности.
Таблица 1: Сравнение производительности стандартного линейного регулирования и импульсного регулирования. (Изображение: ROHM Semiconductor)
Три разновидности импульсного управления
Три основные топологии импульсного аналогового управления: гистерезисная, по напряжению и по току . Каждый из них обеспечивает уникальное соотношение производительности. Гистерезисное управление (также называемое импульсным управлением) является простейшей реализацией и не требует компенсации для поддержания стабильности. Выходное напряжение измеряется и сравнивается с эталоном в гистерезисном контроллере. Цикл переключения начинается, когда выходное напряжение достигает нижнего порога, и завершается через постоянный период времени или когда выходное напряжение достигает верхнего порога (Рисунок 3) .
Цикл переключения начинается, когда выходное напряжение достигает нижнего порога, и завершается через постоянный период времени или когда выходное напряжение достигает верхнего порога (Рисунок 3) .
Рис. 3. Гистерезисное управление является простым и по своей природе стабильным без компенсации, но оно использует переменную частоту переключения, что приводит к проблемам с электромагнитными помехами. (Изображение: Texas Instruments)
Гистерезисное управление является асинхронным, мгновенно реагирующим на изменения напряжения, вызванные ступенчатыми изменениями нагрузки. Контроллеры режима напряжения и тока используют тактовый сигнал и должны ждать до следующего тактового цикла, прежде чем реагировать на любое отклонение напряжения. Быстрая переходная характеристика гистерезисного управления снижает требуемую выходную емкость, но за счет работы с переменной частотой. Управление по напряжению или по току следует использовать в приложениях, которые не могут легко работать с источником питания с переменной частотой.
Только выходное напряжение контролируется через контур обратной связи в режиме управления по напряжению. Управление в режиме напряжения синхронизирует управление с широтно-импульсной модуляцией (ШИМ) с тактовым сигналом (рис. 4) . Для поддержания стабильности требуется компенсация контура, что делает его более сложным в реализации, чем гистерезисное управление. В начале каждого такта управляющий ключ включается, подавая энергию на выход. Компенсированное напряжение ошибки, полученное путем объединения выходного напряжения с опорным напряжением в усилителе ошибки, сравнивается с треугольной волной от генератора ШИМ. Когда линейное изменение сигнала ШИМ пересекает компенсированное напряжение ошибки, контроллер выключает управляющий переключатель, который остается выключенным до следующего тактового импульса.
Рис. 4. Управление в режиме напряжения обеспечивает лучшую помехозащищенность, чем управление в гистерическом режиме или режиме тока, но его реализация может быть сложной. (Изображение: Texas Instruments)
(Изображение: Texas Instruments)
Преимущества управления по напряжению заключаются в его относительной простоте, основанной на использовании единственного контура обратной связи по напряжению, возможности управления более коротким временем включения и хорошей помехоустойчивости. К сожалению, несмотря на то, что обратная связь выглядит просто, компенсация сложна, а разработка источников питания с режимом напряжения может быть относительно сложной задачей.
Управление текущим режимом также синхронизировано с тактовым сигналом. Но у него другой набор компромиссов по дизайну и производительности по сравнению с управлением по напряжению. В начале каждого тактового цикла включается управляющий ключ, подающий энергию на индуктор (рисунок 5) . Как и в режиме напряжения, усилитель ошибки сравнивает выходной сигнал с опорным. Current-mode также отслеживает ток катушки индуктивности. Переключатель выключается, когда измеренный ток пересекает напряжение усилителя ошибки.
Рис. 5: Управление режимом тока быстро реагирует на изменения выходного тока, но чувствительно к скачкам тока. (Изображение: Texas Instruments)
Управление в режиме тока исключает катушку индуктивности из контура, что приводит к однополюсной передаточной функции, связанной только с выходной емкостью и сопротивлением нагрузки. Одна из проблем с управлением по току заключается в том, что шум от переходов переключения может исказить сигнал обратной связи по току, что приведет к преждевременному отключению цикла ШИМ. Для решения этой проблемы обычно используется гашение переднего края. Конструкции с токовым режимом обычно дороже, поскольку они включают в себя петли обратной связи по напряжению и току. Субгармонические колебания, которые могут возникать при рабочих циклах 50 % и выше, являются ограничениями токового управления. Эту проблему можно решить с помощью методов компенсации уклона, что приводит к дополнительной сложности конструкции.
Токовый режим является очень популярным методом управления из-за его работы на фиксированной частоте, упрощенного ограничения тока, возможности параллелизма, хорошей переходной характеристики и относительной простоты компенсации. Каждый из трех основных методов управления источником питания предлагает различные компромиссы производительности и проблемы проектирования (Таблица 2) .
Каждый из трех основных методов управления источником питания предлагает различные компромиссы производительности и проблемы проектирования (Таблица 2) .
Таблица 2: Сравнение эффективности управления блоком питания и сложности конструкции. (Изображение: Texas Instruments)
Цифровой отличается
Цифровые пропорционально-интегрально-дифференциальные (ПИД) регуляторы десятилетиями использовались в (относительно медленных) контурах управления двигателями. Но адаптация ПИД-регулятора для высокочастотных импульсных источников питания является относительно недавней разработкой. ПИД-регулятор может контролировать и контролировать как напряжение, так и ток.
В PID-алгоритме каждый из трех терминов имеет определенное назначение (Рисунок 6) . Ошибка между заданным выходным напряжением и фактическим выходным напряжением является пропорциональным членом, используемым для обеспечения большей части выходных команд контура управления. Интегральный член содержит накопление пропорциональных ошибок и помогает перевести систему управления на требуемое выходное напряжение. Без интегрального члена влияние пропорционального члена на достижение желаемого выходного напряжения уменьшается по мере уменьшения ошибки. Изменение пропорциональной ошибки во времени содержит член производной. Производная составляющая используется для смягчения переходных процессов и обеспечения высокочастотного усиления контура управления.
Интегральный член содержит накопление пропорциональных ошибок и помогает перевести систему управления на требуемое выходное напряжение. Без интегрального члена влияние пропорционального члена на достижение желаемого выходного напряжения уменьшается по мере уменьшения ошибки. Изменение пропорциональной ошибки во времени содержит член производной. Производная составляющая используется для смягчения переходных процессов и обеспечения высокочастотного усиления контура управления.
Рисунок 6: В ПИД-регуляторе (Изображение: Microchip)
Более продвинутые ПИД-алгоритмы включают термины «упреждающей связи». Обычное ПИД-регулирование полагается на измеренную ошибку выходного напряжения, чтобы создать команду, необходимую для движения к желаемому выходному напряжению. Цифровые сигнальные процессоры (DSP) и микропроцессоры (MCU) могут использоваться для добавления дополнительных членов в уравнение PID. Основной термин прямой связи используется для создания «идеальной» команды контура управления на основе значений компонентов системы входного напряжения и желаемого выходного напряжения. Упреждающий член добавляется к базовым параметрам PID для повышения стабильности и общей производительности.
Упреждающий член добавляется к базовым параметрам PID для повышения стабильности и общей производительности.
В более продвинутых реализациях ожидаемые изменения тока нагрузки могут быть добавлены к уравнениям прямой связи. Некоторые большие цифровые ИС, такие как микроконтроллеры, переходят в спящий режим, чтобы свести к минимуму рассеивание тепла, когда они неактивны. MCU, готовящийся к выходу из спящего режима, может сигнализировать источнику питания в ожидании потребности в токе, что приводит к более быстрой переходной реакции. Упреждающие условия могут предвидеть изменения этого типа системы до того, как они отразятся на выходном напряжении источника питания. Эти условия прямой связи по своей сути стабильны и «предвосхищают».
Усовершенствованные алгоритмы цифрового управления могут динамически изменять параметры управления и адаптироваться к изменяющимся условиям эксплуатации, таким как входное напряжение и условия нагрузки, включение и выключение фаз в многофазных архитектурах и сложные схемы управления питанием системы. Цифровое управление также позволяет использовать сложные топологии преобразования энергии, такие как резонансные и квазирезонансные преобразователи, которые нелегко реализовать с помощью аналоговых методов управления.
Цифровое управление также позволяет использовать сложные топологии преобразования энергии, такие как резонансные и квазирезонансные преобразователи, которые нелегко реализовать с помощью аналоговых методов управления.
Резюме
Технологии управления источниками питания значительно продвинулись с течением времени, начиная с базовых феррорезонансных и линейных источников питания, которые до сих пор широко распространены. Развитие импульсного управления повысило эффективность преобразования энергии, начиная с гистерезисного управления и управления по напряжению, до перехода к управлению по току, что упростило компенсацию обратной связи. Цифровое управление сделало возможным более совершенное управление силовым преобразователем, включая управление с упреждением и возможность динамического изменения параметров управления для адаптации к меняющимся условиям работы и системным требованиям.
Ссылки
Методы управления (режим напряжения, режим тока, управление гистерезисом), ROHM Semiconductor
Феррорезонансный источник питания, Sunpower Electronics
Введение в теорию управления мощностью, Texas Instruments
Введение в методы управления импульсными источниками питания, Microchip
PID Basic с, Блоки питания Microchip
| Аллен-Брэдли
Источники питания
Мы предлагаем широкий спектр решений для электропитания. От импульсных и промышленных источников бесперебойного питания до трансформаторов, каждый продукт разработан для обеспечения надежности и безотказной работы.
От импульсных и промышленных источников бесперебойного питания до трансформаторов, каждый продукт разработан для обеспечения надежности и безотказной работы.
9Импульсные источники питания 0092
Наш импульсный источник питания Bulletin 1606 включает четыре семейства продуктов, которые отвечают большинству глобальных требований к однофазным и трехфазным приложениям. Эти устройства спроектированы и изготовлены для работы в широком диапазоне входных напряжений как переменного, так и постоянного тока и прошли испытания на соответствие мировым стандартам безопасности.
Блоки питания ArmorPower On-Machine
Наш бюллетень 1607-XT Блоки питания ArmorPower™ On-Machine™ предназначены для приложений, в которых падение напряжения происходит из-за потерь в линии, а компактный размер, высокая эффективность и надежность имеют решающее значение. Доступные в моделях мощностью 50–200 Вт, эти блоки питания со степенью защиты IP67 отражают тенденцию отказа от традиционных корпусов для установки на машинах и в заводских условиях. Эти блоки питания имеют вакуумную герметизацию для обеспечения максимальной устойчивости к ударам, вибрации и влажности.
Эти блоки питания имеют вакуумную герметизацию для обеспечения максимальной устойчивости к ударам, вибрации и влажности.
информация о продукте
Источники бесперебойного питания
Источники бесперебойного питания Bulletin 1609 разработаны специально для промышленного применения. Они соответствуют мировым требованиям промышленного и общего назначения до 10 кВА. Эти устройства сертифицированы во всем мире для обеспечения резервного питания переменного тока для преодоления провалов, просадок или кратковременных потерь напряжения в линии.
Трансформаторы цепи управления
Наши трансформаторы глобальных цепей управления предназначены для снижения напряжения питания цепей управления, обеспечивая большую безопасность операторов. Для дополнительной безопасности на рабочем месте все устройства снабжены защитными крышками клемм IP2X и крышками предохранителей.