Осциллограмма шагового двигателя: Схема управления шаговым двигателем Осциллограммы токов в обмотках управления шагового двигателя
Содержание
Управление шаговым двигателем | Электроника для всех
Робототехника
DI HALT 207 комментариев
| Первая модификация силового блока. L293 вытащена. |
| Вид снизу |
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Униполярный отличается от биполярного только тем, что ему нужна куда более простая схема управления, а еще у него значительно слабее момент. Так как работает он только половинами обмоток. НО! Если оторвать нафиг средний вывод униполярника, то мы получим обычный биполярный.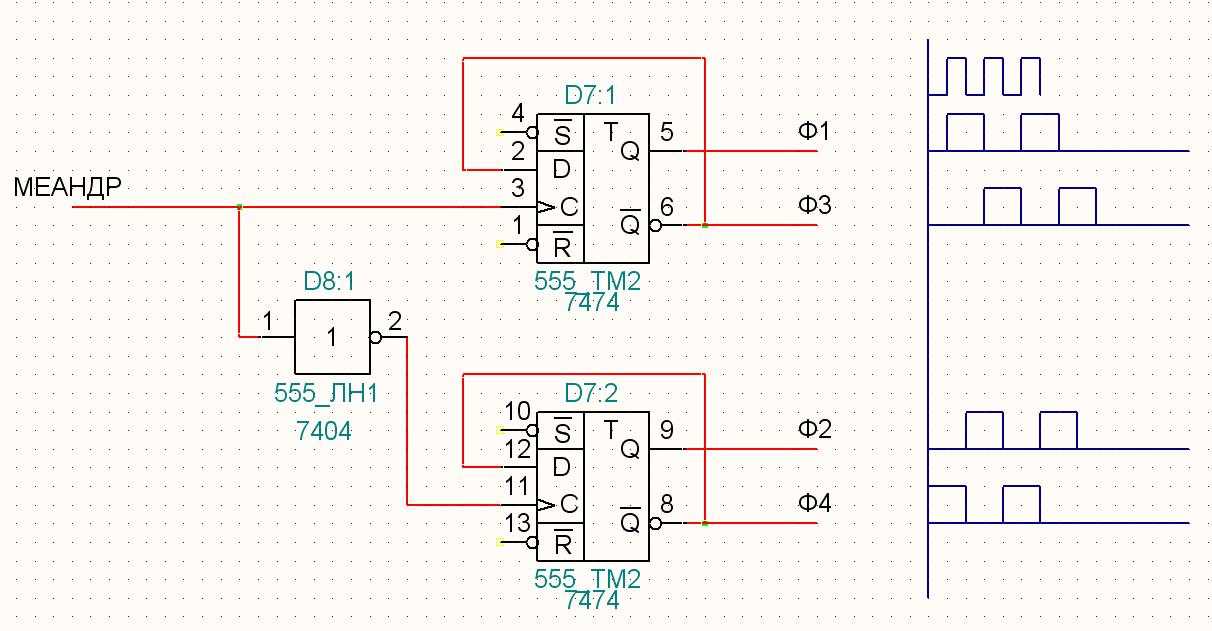 Определить какой из выводов средний не сложно, достаточно прозвонить сопротивление тестером. От среднего до крайних сопротивление будет равно ровно половине сопротивления между крайних выводов. Так что если тебе достался униполярник, а схема подключения для биполярного, то не парься и отрывай средний провод.
Определить какой из выводов средний не сложно, достаточно прозвонить сопротивление тестером. От среднего до крайних сопротивление будет равно ровно половине сопротивления между крайних выводов. Так что если тебе достался униполярник, а схема подключения для биполярного, то не парься и отрывай средний провод.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
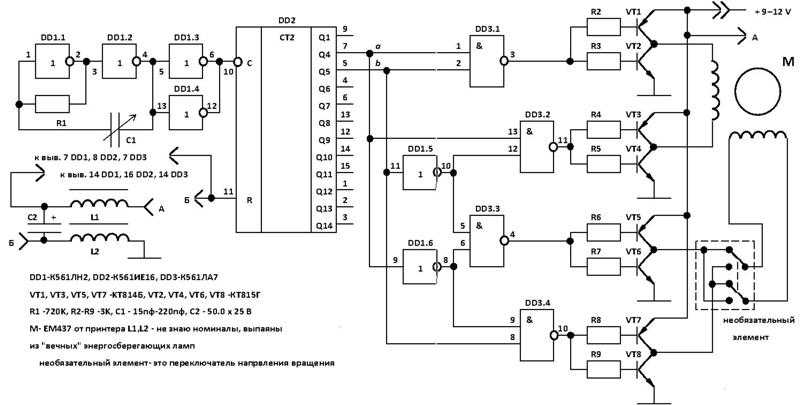
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект.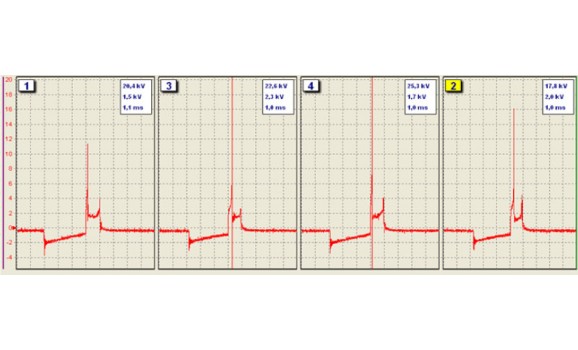 Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N.
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3, а если 1 то через выходы на драйвер ABCD.
 Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема. - На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0. 5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
 Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема. 5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.Правда на будущее, когда я буду делать роботу шаговый привод, я возьму не связку L297+L293, а микруху L6208 которая может и чуть слабей по току, но зато два в одном! Сразу подключай двигатель и работай. Если же их покупать, то на L6208 получается даже чуть дешевле.
Документация по микросхемам:
- Управляющий контроллер L297
- Силовой мост L298N
- Силовой мост L293
- Управляющий контроллер с интегрированным силовым мостом L6208
- Сводная таблица микросхем управления шаговыми двигателями
Шаговый двигательЭлектропривод
Спасибо!!! Вы потрясающие! Всего за месяц мы собрали нужную сумму в 500000 на хоккейную коробку для детского дома Аистенок.
А я встрял на три года, как минимум, ежемесячной пахоты над статьями :)))))))))))) Спасибо вам за такой мощный пинок!!!
 Из которых 125000+ было от вас, читателей EasyElectronics!!! Были даже переводы на 25000+ и просто поток платежей на 251 рубль. Это невероятно круто!!! Сейчас идет заключение договора и подготовка к строительству!
Из которых 125000+ было от вас, читателей EasyElectronics!!! Были даже переводы на 25000+ и просто поток платежей на 251 рубль. Это невероятно круто!!! Сейчас идет заключение договора и подготовка к строительству!Регулятор холостого хода установлен на корпусе дроссельного патрубка. Регулятор состоит из двухполюсного шагового двигателя с двумя обмотками и соединенного с ним конусного штока клапана. Конусная часть штока регулятора холостого хода располагается в канале подачи воздуха для обеспечения регулирования холостого хода двигателя. Шток регулятора выдвигается или втягивается в зависимости от управляющего сигнала контроллера. Регулятор холостого хода регулирует частоту вращения коленчатого вала на режиме холостого хода, управляя количеством воздуха, подаваемым в обход закрытой дроссельной заслонки. В полностью выдвинутом положении (выдвинутое до упора положение соответствует «0» шагов), конусная часть штока перекрывает подачу воздуха в обход дроссельной заслонки.
 При открывании клапан обеспечивает расход воздуха, пропорциональный перемещению штока (количеству шагов) от своего седла. Полностью открытое положение клапана соответствует перемещению штока на 255 шагов. На прогретом двигателе контроллер, управляя перемещением штока, поддерживает постоянную частоту вращения коленчатого вала на холостом ходу независимо от состояния двигателя и от изменения нагрузки (включение электровентилятора, компрессора кондиционера и т.д.). Эталонная осциллограмма На осцилогармме видно как обе обмотки РХХ работают в противофазе относительно друг друга. Частота и скважность этих импульсов зависит только от нажатия педали акселератора. Осциллограмма на ХХ На холостом ходу осциллограмма может иметь любой вид, т.к. происходит регулирование холостого хода.
При открывании клапан обеспечивает расход воздуха, пропорциональный перемещению штока (количеству шагов) от своего седла. Полностью открытое положение клапана соответствует перемещению штока на 255 шагов. На прогретом двигателе контроллер, управляя перемещением штока, поддерживает постоянную частоту вращения коленчатого вала на холостом ходу независимо от состояния двигателя и от изменения нагрузки (включение электровентилятора, компрессора кондиционера и т.д.). Эталонная осциллограмма На осцилогармме видно как обе обмотки РХХ работают в противофазе относительно друг друга. Частота и скважность этих импульсов зависит только от нажатия педали акселератора. Осциллограмма на ХХ На холостом ходу осциллограмма может иметь любой вид, т.к. происходит регулирование холостого хода.
Регулятор холостого хода установлен на корпусе дроссельного патрубка. Регулятор состоит из двухполюсного шагового двигателя с двумя обмотками и соединенного с ним конусного штока клапана. Конусная часть штока регулятора холостого хода располагается в канале подачи воздуха для обеспечения регулирования холостого хода двигателя.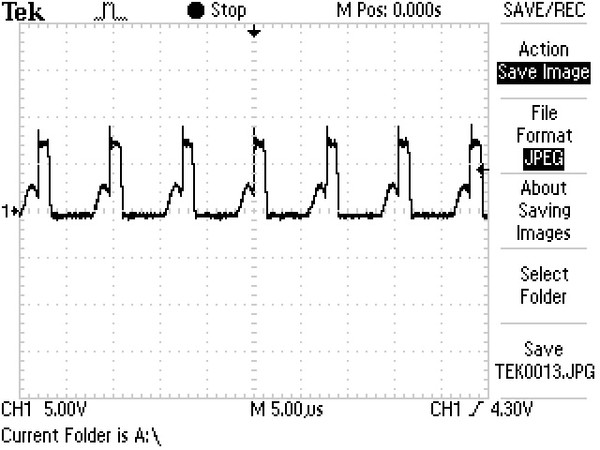 Шток регулятора выдвигается или втягивается в зависимости от управляющего сигнала контроллера. Регулятор холостого хода регулирует частоту вращения коленчатого вала на режиме холостого хода, управляя количеством воздуха, подаваемым в обход закрытой дроссельной заслонки. В полностью выдвинутом положении (выдвинутое до упора положение соответствует «0» шагов), конусная часть штока перекрывает подачу воздуха в обход дроссельной заслонки. При открывании клапан обеспечивает расход воздуха, пропорциональный перемещению штока (количеству шагов) от своего седла. Полностью открытое положение клапана соответствует перемещению штока на 255 шагов. На прогретом двигателе контроллер, управляя перемещением штока, поддерживает постоянную частоту вращения коленчатого вала на холостом ходу независимо от состояния двигателя и от изменения нагрузки (включение электровентилятора, компрессора кондиционера и т.д.).
Шток регулятора выдвигается или втягивается в зависимости от управляющего сигнала контроллера. Регулятор холостого хода регулирует частоту вращения коленчатого вала на режиме холостого хода, управляя количеством воздуха, подаваемым в обход закрытой дроссельной заслонки. В полностью выдвинутом положении (выдвинутое до упора положение соответствует «0» шагов), конусная часть штока перекрывает подачу воздуха в обход дроссельной заслонки. При открывании клапан обеспечивает расход воздуха, пропорциональный перемещению штока (количеству шагов) от своего седла. Полностью открытое положение клапана соответствует перемещению штока на 255 шагов. На прогретом двигателе контроллер, управляя перемещением штока, поддерживает постоянную частоту вращения коленчатого вала на холостом ходу независимо от состояния двигателя и от изменения нагрузки (включение электровентилятора, компрессора кондиционера и т.д.).
Эталонная осциллограммаНа осцилогармме видно как обе обмотки РХХ работают в противофазе относительно друг друга. Частота и скважность этих импульсов зависит только от нажатия педали акселератора.
Частота и скважность этих импульсов зависит только от нажатия педали акселератора.
Осциллограмма на ХХ
На холостом ходу осциллограмма может иметь любой вид, т.к. происходит регулирование холостого хода.
Почему фазные токи шагового двигателя имеют синусоидальную форму волны?
спросил
Изменено
3 года, 7 месяцев назад
Просмотрено
1к раз
\$\начало группы\$
Я не знаю, действительно ли это глупый вопрос или нет, но я видел всевозможные обсуждения крутящего момента, пикового тока и среднеквадратичного значения, связанные с текущим выходным сигналом для шаговых двигателей. Я признаю, что для плавной работы двухфазного гибридного шагового двигателя фазные токи должны быть двумя синусоидами, одна опережающая 90º по отношению к другому, как на изображении ниже
https://www.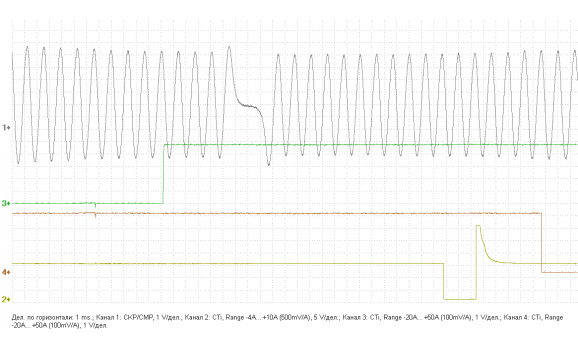 researchgate.net/figure/Sampled-currents-in-2-phases-of-stepper-motor-in-500-ms_fig4_275460011 Но я действительно не не знаю почему так. Я читал в книге (Stephen D. Umans-Fitzgerald & Kingsley’s Eletrical Machinery), что крутящий момент как функция угла ротора представляет собой синусоидальную кривую, когда возбуждаются фазы A или B, но почему фазы A и B также должны быть возбуждены? синусоидальный ток мне не понятен. Я заранее благодарен всем, кто может объяснить мне эту корреляцию между текущими синусоидальными формами сигналов и крутящим моментом.
researchgate.net/figure/Sampled-currents-in-2-phases-of-stepper-motor-in-500-ms_fig4_275460011 Но я действительно не не знаю почему так. Я читал в книге (Stephen D. Umans-Fitzgerald & Kingsley’s Eletrical Machinery), что крутящий момент как функция угла ротора представляет собой синусоидальную кривую, когда возбуждаются фазы A или B, но почему фазы A и B также должны быть возбуждены? синусоидальный ток мне не понятен. Я заранее благодарен всем, кто может объяснить мне эту корреляцию между текущими синусоидальными формами сигналов и крутящим моментом.
(https://www.researchgate.net/figure/Sampled-currents-in-2-phases-of-stepper-motor-in-500-ms_fig4_275460011)
- ток
- шаговый двигатель
- 2
- 2
- 2
- 2
- 2
- 2
- 2 шаговый двигатель крутящий момент
- шаговый привод
\$\конечная группа\$
3
\$\начало группы\$
Синусоида, показанная в вашем вопросе, связана с позицией шагового двигателя между его базовыми фиксаторами, она не имеет ничего общего с током через фазы или скоростью (об/мин) двигателя.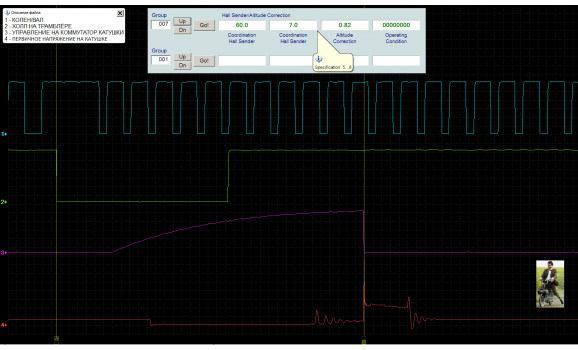 Частоту этой синусоиды можно привести к постоянному току, другими словами, двигатель неподвижен.
Частоту этой синусоиды можно привести к постоянному току, другими словами, двигатель неподвижен.
Посмотрите что-нибудь вроде таблицы данных TB6600, чтобы понять разницу между коэффициентом тока положения (относительно двух фаз) и током переключателя (относится только к одной фазе).
Один описывает относительные отношения между токами в двух фазах (но не имеет ничего общего с абсолютными значениями, индуктивностью или сопротивлением фаз шагового двигателя), а другой описывает фактический фазный ток в одной фазе. Учтите, что один и тот же драйвер может управлять шаговым двигателем с пиковым током 0,5 А и шаговым двигателем с пиковым током 2 А… соотношение позиций не меняется.
Токи шагового двигателя НЕ ДОЛЖНЫ быть синусоидальными, но отношения между фазными токами должны быть синусоидальными. Это зависит исключительно от того, используете ли вы микрошаг или нет.
Микрошаг позволяет расположить двигатель между его базовыми положениями шага. Например, шаговый двигатель с углом поворота 1,8 градуса может управляться с разрешением, в 4, 8, 16. ..256 раз превышающим базовое разрешение шага. Начало чтения:
..256 раз превышающим базовое разрешение шага. Начало чтения:
- Микрошаг в отношении пошагового крутящего момента
- Частота коммутации по отношению к фазному току
Обратите внимание, что в № 1 крутящий момент быстро падает при увеличении отношения микрошагов. Учтите, что в любой точке позиционной области изменение тока в двух фазах падает, что эффективно снижает мощность, доступную для вращения якоря двигателя.
Вам НЕ НУЖНО иметь драйвер переключения для пофазных токов. В первые дни было много дисководов, которые позиционировали головки с помощью шаговых двигателей, но они использовали ЦАП с драйвером постоянного тока для установки тока на фазу.
Если вам нужен хороший справочник для понимания шаговых двигателей и приводных технологий, вы не найдете ничего лучше, чем книга Пола Акарнли «ШАГОВЫЕ ДВИГАТЕЛИ: РУКОВОДСТВО ПО ТЕОРИИ И ПРАКТИКЕ».
В частности, для вашего вопроса будут интересны разделы 3.4.2 и 3.4.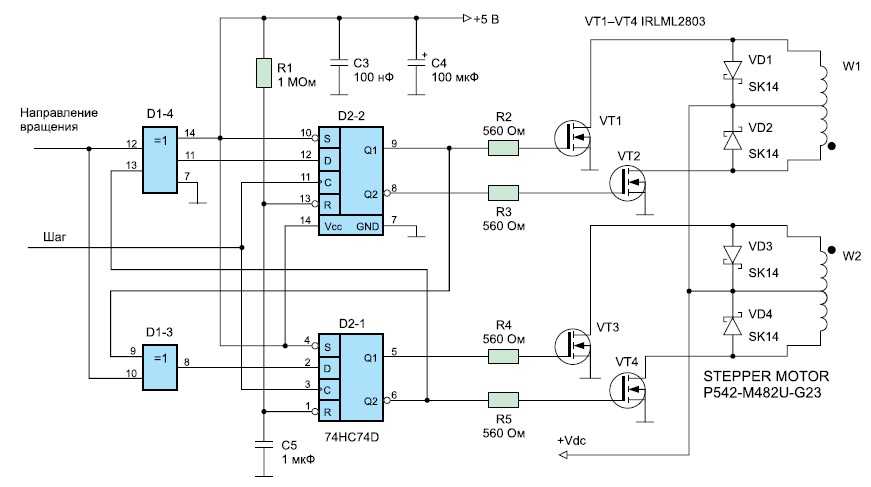 3 и 5.4.4.
3 и 5.4.4.
\$\конечная группа\$
4
\$\начало группы\$
Все двигатели постоянного тока работают с управляемым током крутящим моментом.
Степперы ничем не отличаются на медленных скоростях переменного шага тока.
Удерживающий момент (T) является произведением постоянного крутящего момента двигателя (KT) и тока (i), подаваемого на обмотки статора.
верно то, что по мере того, как ток уменьшается с микроступенчатым положением между полюсами, крутящий момент уменьшается синусоидальным образом и, таким образом, может идти только на 1/16 ускорения и на 1/16 в худшем случае статическая нагрузка проскальзывает по сравнению с полным ступенчатое регулирование тока. Таким образом, этот метод сглаживания крутящего момента значительно компенсирует максимальный крутящий момент и максимальное ускорение.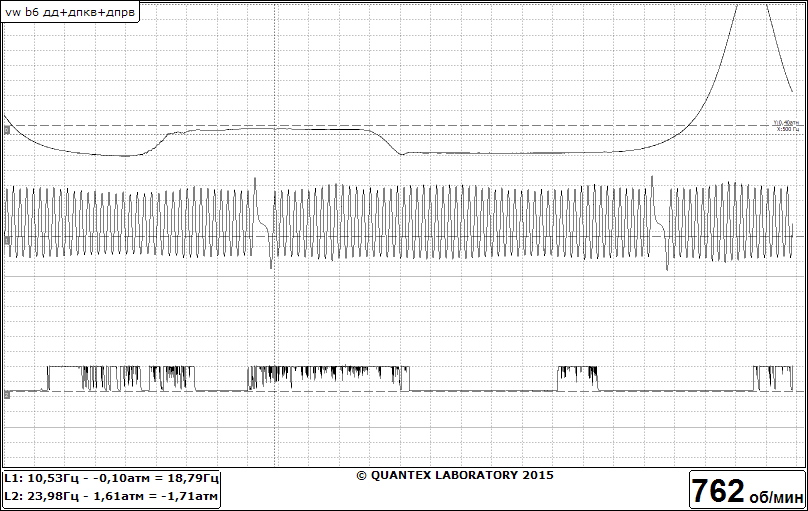 Пошаговая скорость нарастания шага уменьшается на время отклика L/R, что делает временной график синусоидальным.
Пошаговая скорость нарастания шага уменьшается на время отклика L/R, что делает временной график синусоидальным.
У этого исследователя были некоторые проблемы с шумом на графиках, что не имеет большого значения из-за необходимых сбоев времени простоя двигателя L/R = 3,5 мГн/5R = 440 мкс, что приводит к шуму 1,1 кГц.
В идеальном случае токи двигателя имеют квадратурную разность фаз 90 градусов. т. е. регулируемые sin/cos токи на некоторой фазе в соответствии с таблицей поиска синуса от 0 до 100% с 8-битным разрешением, что дает 256 микрошагов рабочего цикла ШИМ от 0 до 255.
например.
Шаг 𝐷 = рабочий цикл при 40 кГц для однофазной обмотки 1 251 2 238 3 217 4 188 5 154 6 114 7 70 8 24 924 10 70 11 114 12 154 13 188 14 217 15 238 16 251
Это не идеальный дизайн, но работает.
В этой статье реализация FPGA не идеальна, и они показывают квадратурные токи с разницей в 72 градуса. Работает на полюсной частоте 2 Гц.
При работе с максимальной скоростью шагового двигателя отношение индуктивности/сопротивления двигателя является ограничивающим фактором для частоты полюсов, поскольку индуктивность увеличивает импеданс, уменьшает ток и крутящий момент обмотки и увеличивает вероятность проскальзывания.
В этой статье использовались 40 кГц L=3,5 мГн и DCR= 5 Ом.
\$\конечная группа\$
11
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
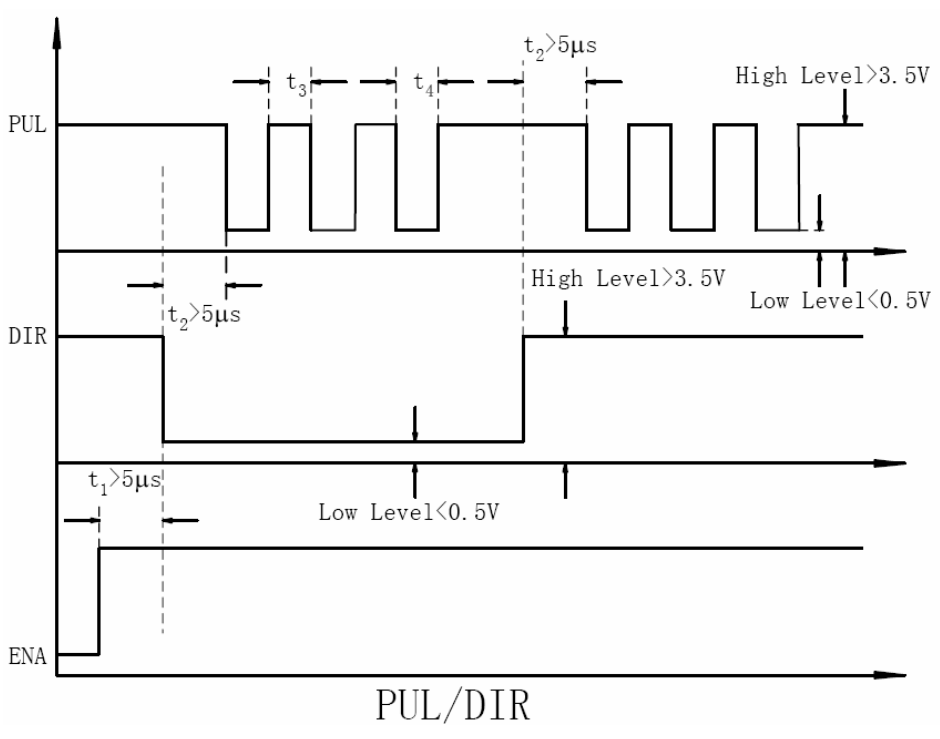
Сигналы шагового двигателя
Задавать вопрос
спросил
Изменено
5 лет, 1 месяц назад
Просмотрено
2к раз
\$\начало группы\$
Я работаю с шаговым двигателем и не понимаю, почему ток, поступающий в две обмотки, ведет себя так, как показано на снимке экрана осциллографа.
Шаговый двигатель: FL42STh57-1204A (4-проводной) Драйвер: ST L6208
Драйвер настроен на работу в полношаговом режиме и с быстрым затуханием, 1,2 А при 24 В. Мотор работает на 700 об/мин.
СИНИЙ/ЗЕЛЕНЫЙ: Узлы измерения тока обмотки КРАСНЫЙ: Шаг ЖЕЛТЫЙ: Обмотка
При более низкой скорости токи заряжаются/разряжаются в соответствии с нормальной экспоненциальной модой, но когда я увеличиваю скорость, токи начинают показывать это странное поведение.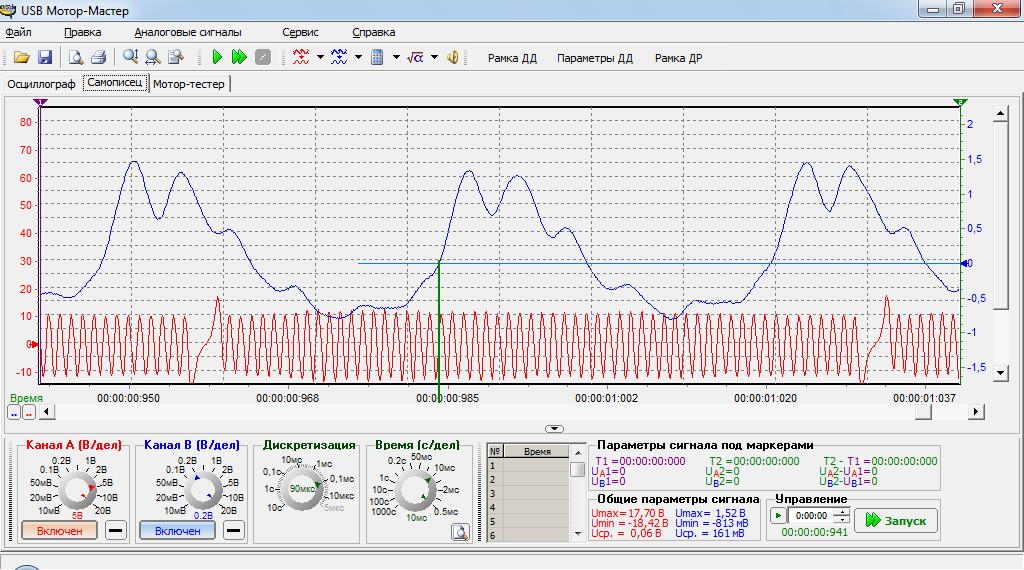 Сначала я думал, что это из-за того, что драйвер не справляется с текущей нагрузкой, но тот же результат был получен с более мощным драйвером. Это заставляет меня думать, что это связано с базовой физикой индуктивности, но я не могу понять, что вызывает это. Кто-нибудь знает, что происходит? Спасибо.
Сначала я думал, что это из-за того, что драйвер не справляется с текущей нагрузкой, но тот же результат был получен с более мощным драйвером. Это заставляет меня думать, что это связано с базовой физикой индуктивности, но я не могу понять, что вызывает это. Кто-нибудь знает, что происходит? Спасибо.
- шаговый двигатель
- шаговый двигатель
\$\конечная группа\$
\$\начало группы\$
При высокой частоте шагов шаговые двигатели демонстрируют динамическую нестабильность. Во многих случаях это приводит к слегка затухающему переходному процессу скорости. Это то, что вы видите. В худшем случае привод будет работать нестабильно… потеря синхронизма. Причина этого в том, что двигатель представляет собой нелинейную систему четвертого порядка. Его нельзя рассматривать как линейную систему! Индуктивность и обратная ЭДС определенно влияют на стабильность. Как правило, чем выше скорость шага, тем ниже стабильность.
Похожие записи
-

 Внешняя звуковая карта что это: Как выбрать звуковую карту — Статья Dr.Head
Внешняя звуковая карта что это: Как выбрать звуковую карту — Статья Dr.Head - Redmond rmc 50 мультиварка: Мультиварка REDMOND RMC-M50
- Термопаста mx 2 или mx 4: Тестирование термопасты Arctic Cooling MX-2 2019. Тестирование легенды №2 в новой обертке. + Бонусы.
- Пищалка для холодильника: Сигнализация открытой дверки холодильника: useful_faq — LiveJournal