Гироскутер переделка: Что можно сделать из гироскутера? Самокат и электросамокат своими руками, машина и электромобиль, карт и детский велосипед без контроллера
Содержание
Прошивка гироскутера под ручку газа
Прошивка платы надоевшего гироскутера под ручку (педаль) газа открывает новые возможности для самодельщиков электротранспорта. Гироскутер (ховерборд) является отличным недорогим донором для изготовления электротранспорта своими руками. На основе запчастей гироскутера можно собрать электросамокат, трайк, детский четырехколесный автомобиль, багги, самоходную тележку и другие двух (и более) колесные полезные и интересные самоделки.
Некоторые самоделки Вы можете посмотреть в этом видео.
В этой статье рассказано именно о прошивке под управление с ручки газа, но применяя другие настройки плата может управляться с проводного джойстика, пульта дистанционного управления. Это ещё больше расширяет область её применения!
Это ещё больше расширяет область её применения!
Присоединяйтесь к Телеграмм-группе “Самоделки из гироскутера” если возникают вопросы!
Прошивка, о которой здесь пойдет речь абсолютно бесплатная. Исходник периодически обновляется и дорабатывается, свежую версию всегда можно скачать с официальной страницы разработчиков на GitHub.
Содержание статьи
- На что нужно обратить внимание при выборе донора
- Что понадобится для прошивки
- Настройка прошивки
- Формирование файла прошивки
- Примеры готовых прошивок
- Подключение программатора к плате
- Процесс прошивки
- Подключение ручки газа и тормоза
- Калибровка ручек газа и тормоза
- Звуковые сигналы ошибок
- Обсуждение и комментарии
Контроллер от гироскутера с такой прошивкой не уступает обычным велосипедным/самокатным контроллерам средней мощности. Кратко о возможностях и особенностях:
Кратко о возможностях и особенностях:
- векторное (FOC) управление моторами, за счет этого высокий КПД и экономичный расход энергии
- один контроллер управляет двумя моторами (возможна прошивка на один мотор)
- управление с обычных ручек или педалей для электротранспорта на датчиках Холла или потенциометрах
- любая плата выдерживает пиковый батарейный ток на каждый мотор до 25 А, при 36 В это более 900 Вт (более 20 А потребуется улучшение теплоотвода). Более высокий ток на Ваш страх и риск.
- ручка газа управляет мощностью (током), вкачиваемой в мотор, а не оборотами (напряжением), как у велосипедных, за счет этого плавный старт и гораздо лучше поведение в поворотах в конфигурации трайка или автомобиля
- активный электронный тормоз с кнопки или курка (аналог ручки газа) с плавным дозированием усилия. В некоторых случаях позволяет отказаться от механических тормозов
- свободный накат при сбросе газа, как у велосипедного контроллера
- задний ход активируется ручкой тормоза при условии, что колеса остановлены (два коротких полных нажатия)
- ослабление поля (задается в настройках прошивки) позволяет добиться более высоких оборотов без поднятия напряжения батареи.

- безопасный верхний предел напряжения питания до 60 В. Это батарея из литий ионных элементов до 14S (полный заряд 58,8 В).

На что нужно обратить внимание при выборе донора
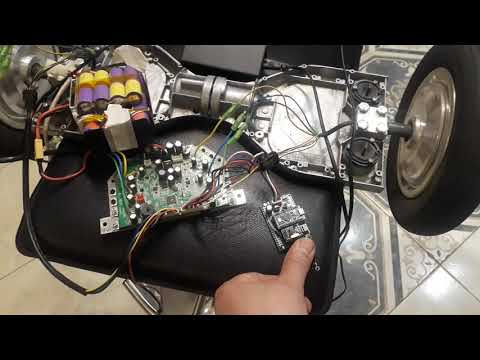
Первое условие – для такой прошивки подойдет гироскутер с тремя платами на борту. Это большинство первых версий гироскутеров. Одна из них – плата контроллера (она самая большая) и две платы поменьше (гироскопы). В одной половине корпуса размещается первый гироскоп и контроллер, в другой – батарея и второй гироскоп. Еще встречаются гироскутеры с двумя платами, такие для прошивки не подойдут.
Форма главной платы может отличаться, но на ней всегда есть 12 мощных транзисторов на алюминиевом радиаторе и многоногая микросхема (чип, процессор), на название которой нужно обязательно обратить внимание.
Второе условие – плата контроллера обязательно должна быть с чипом STM32F103RCT6, GD32F103RCT6.
Что понадобится для прошивки
Программатор ST-Link
Программатор ST-Link V2 доставка из Китая / доставка из РФ. Все необходимые провода для подключения будут в комплекте.
Все необходимые провода для подключения будут в комплекте.
Утилита для программатора STM32 ST-LINK Utility
Скачиваем с официального сайта актуальную версию. Нужно будет принять пользовательское соглашение и указать действующий адрес электронной почты. На него придет письмо со ссылкой на скачивание утилиты.
При установке всё предельно просто, и проблем возникнуть не должно.
Интерфейс утилиты выглядит следующим образом:
Драйвера для программатора ST-Link V2
digitally-signed-usb-driver-for-st-linkv2-on-win7810Скачать
Распаковываем архив и от имени администратора запускаем dpinst_amd64 (для х64) или dpinst_x86 (для х32) в зависимости от разрядности операционной системы. Разрядность можно посмотреть – Мой компьютер – свойства, (тип системы)
Исходник прошивки
Исходник прошивки (проект) прямая ссылка скачиваем, извлекаем из архива и сохраняем. Его будем настраивать.
В связи с иногда возникающими проблемами в обновленных исходниках, оставлю архив с одной из старых стабильных версий:
hoverboard-firmware-hack-foc-master-03-08-2021Скачать
Программа Visual Studio
Программа Visual Studio позволит настроить прошивку нужным нам образом и создать BIN-файл, который мы и будем заливать в микроконтроллер с помощью программатора. Для скачивания Visual Studio нужно будет зарегистрироваться на сайте. В процессе установки необходимо соглашаться на все разрешения для программы.
После запуска необходимо установить дополнение PlatformIO IDE. Копируем название, жмем на значок в левом меню, вставляем в поле поиска, выбираем из списка и жмем Install. После завершения установки и автоматических обновлений (это может занять немало времени и она подгузит еще несколько нужных дополнений сама) программа готова к работе.
,
 ru\/proshivka-giroskutera-pod-ruchku-gaza\/"}»>
ru\/proshivka-giroskutera-pod-ruchku-gaza\/"}»>Также при неполадках с программой иногда помогает её запуск через “Исправление неполадок совместимости” (жмем на иконку программы правой кнопкой мыши, из меню выбираем эту функцию) экспериментируем с различными вариантами.
Настройка прошивки
В исходном состоянии прошивка не готова к заливке в контроллер и её нужно подготовить. Все скриншоты сделаны после редактирования настроек под ту конфигурацию, которая была необходима мне для электросамоката. В ней оба колеса вращаются в одном направлении, максимальный ток на один мотор 15А. Для своих нужд Вы можете экспериментировать с настройками.
Открываем в программе Visual Studio папку с проектом (исходником прошивки). Жмем иконку Explorer – File – Open Folder и выбираем папку с проектом. Необходимо выбрать именно конечную папку с этим названием, иначе прошивка может не компилироваться (не собираться).
Выбор режима управления
Открываем в левом меню пункт platformio.ini. Здесь мы видим список возможных вариантов управления. Для управления ручкой газа служит вариант HOVERCAR. Для его активации нужно раскомментировать строку default_envs = VARIANT_HOVERCAR; Variant for HOVERCAR build, для этого убираем знак ; в начале строки.
Далее в левом меню выбираем Inc – config.h, открывается код, в котором и проводим необходимые настройки.
Настройка батареи
Так как исходник проекта периодически обновляется, у Вас номера строк могут отличаться от тех, что я привожу в скриншотах, но по тексту их легко найти. Вы можете воспользоваться переводчиком, чтобы понять за что отвечают строки, я приведу описание только понятных мне.
Вы можете воспользоваться переводчиком, чтобы понять за что отвечают строки, я приведу описание только понятных мне.
Настройки батареи (строки 63-82).
Эта настройка нужна для того чтобы научить контроллер правильно измерять напряжение батареи. При вводе неправильного значения в BAT_CALIB_REAL_VOLTAGE возможно преждевременное отключение контроллера, отключение сразу после запуска.
70 #define BAT_CALIB_REAL_VOLTAGE 3600 – указать реальное напряжение батареи из расчета 1000=10В на момент прошивки. Достаточно измерить напряжение батареи мультиметром. Например, 36 В записываем как 3600.
72 #define BAT_CELLS 10 – количество последовательных ячеек в батарее
73-74 #define BAT_LVL_1..2 напряжение при котором будет подаваться предупреждающий звуковой сигнал (350 = 3,50 вольт на банку при 10S)
81 #define BAT_DEAD (337……) – при каком напряжении на банку (337=3,37 В) отключить батарею (во избежание переразряда)
 ru\/proshivka-giroskutera-pod-ruchku-gaza\/"}»>
ru\/proshivka-giroskutera-pod-ruchku-gaza\/"}»>При использовании 10S литий ионной батареи допускается её разряд до 30 В. Поэтому значения BAT_LVL2, BAT_LVL1 и BAT_DEAD целесообразнее установить 340, 320 и 300 соответственно.
Можно сделать проще, если не нужно звуковое оповещение уровня заряда и отключение при разряде АКБ. Если на борту есть вольтметр (например курок газа с ним) и батарея с БМСкой, эти функции вобщим то и не нужны. В этом случае BAT_CALIB_REAL_VOLTAGE пишем например 3600, занижаем значение BAT_DEAD например до 100 (10 вольт). Отключаем звук #define BAT_LVL2_ENABLE (пишем 0 как у #define BAT_LVL1_ENABLE) Плата исправно работает начиная с 24 В (моя точно работает).
Отключение/включение моторов
(138-140) При необходимости, можно программно отключить один из моторов, если он не нужен в конструкции. Дело в том, что при запуске контроллера сначала происходит самодиагностика. Если один из моторов отключен физически (отключены провода датчиков Холла) от платы с прошивкой на два мотора, при запуске будет ошибка. Не будет работать ни один мотор и зуммер будет писком сигнализировать о неисправности. По умолчанию оба мотора включены.
Не будет работать ни один мотор и зуммер будет писком сигнализировать о неисправности. По умолчанию оба мотора включены.
138 // Enable/Disable Motor
139 #define MOTOR_LEFT_ENA – для отключения левого мотора закомментировать
140 #define MOTOR_RIGHT_ENA – для отключения правого мотора закомментировать
Типы управления и методы контроля
(142-145)
Для самокатов, машинок и других проектов с водителем хорошо подходит FOC_CTRL в сочетании с TRQ_MODE (управление моментом). При этом управление наиболее мягкое, высокая энергоэффективность, свободный накат при сбросе газа.
Также в разделе ховеркар (ищите ниже)
############## VARIANT_HOVERCAR SETTINGS ####################
выставляем в #define CTRL_MOD_REQ значение TRQ_MODE
Ограничение тока и оборотов
В зависимости от требуемой пиковой мощности в моторах и токоотдачи аккумулятора можно отрегулировать максимальный вливаемый в моторы ток. Для своих 250 Вт моторов я оставил ток по умолчанию 15А. На практике любая плата выдерживает пиковый непродолжительный ток до 25 А (потребуется улучшить охлаждение). Более высокий ток на ваш страх и риск.
Для своих 250 Вт моторов я оставил ток по умолчанию 15А. На практике любая плата выдерживает пиковый непродолжительный ток до 25 А (потребуется улучшить охлаждение). Более высокий ток на ваш страх и риск.
(147-150)
// Limitation settings
define I_MOT_MAX 15 – максимальный ток одного мотора, А
define I_DC_MAX 17 – ставим на 2 Ампера больше как рекомендует автор исходника, либо если колеса “пищат” при резком старте – добавляем экспериментально по 1.
define N_MOT_MAX 1000 – ограничение максимальных оборотов, об/мин. Это не значит что с 36 В батареей гироскутерные колеса раскрутятся до такой скорости, обороты зависят от мощности моторов, приложенной нагрузки, тока, напряжения батареи в совокупности. Максимальное значение 2000, рекомендую поставить максимум, чтобы избежать проблемы притормаживания при сбросе газа на максималной скорости.
Ослабление поля/опережение фазы
Ослабление поля позволяет раскручивать мотор на бОльшие обороты без увеличения напряжения батареи. При этом если силы моторов хватает для ускорения под нагрузкой, они раскрутятся. Также увеличится и расход батареи. Если при резком сбросе газа после разгона до повышенной скорости моторы будут притормаживать до замедления до некой промежуточной скорости, установите в FIELD_WEAK_HI и N_MOT_MAX значение 1600-2000.
При этом если силы моторов хватает для ускорения под нагрузкой, они раскрутятся. Также увеличится и расход батареи. Если при резком сбросе газа после разгона до повышенной скорости моторы будут притормаживать до замедления до некой промежуточной скорости, установите в FIELD_WEAK_HI и N_MOT_MAX значение 1600-2000.
(152-157)
// Field Weakening / Phase Advance
153 define FIELD_WEAK_ENA 1 – Включение ослабления поля / опережения фазы: 0 = отключено (по умолчанию), 1 = включено
154 define FIELD_WEAK_MAX 6 – Максимальный ток ослабления поля, чем больше тем выше возможная скорость (максимум 10)
156 define FIELD_WEAK_HI 1000 // (1000, 1500] – Верхний порог для ограничения оборотов, ставим 1600 если наблюдается глюк при сбросе газа как описано выше
157 define FIELD_WEAK_LO 750 // ( 500, 1000] – Нижний порог оборотов при котором включается ослабления поля
Направление вращения моторов
(502-503)
Раскомментировать для активации. По умолчанию моторы вращаются как если бы они стояли на гироскутере и он катился вперед. На скриншоте инвертирован правый мотор, при этом оба мотора (если смотреть со стороны оси) вращаются по часовой стрелке.
По умолчанию моторы вращаются как если бы они стояли на гироскутере и он катился вперед. На скриншоте инвертирован правый мотор, при этом оба мотора (если смотреть со стороны оси) вращаются по часовой стрелке.
//#define INVERT_R_DIRECTION – инвертировать правый мотор
//#define INVERT_L_DIRECTION – инвертировать левый мотор
#define SPEED_COEFFICIENT – чем больше значение тем стремительнее ускорение. При токе на колесо 15 А его значение 16384 более менее оптимально, если уменьшаете ток то экспериментально уменьшите и коэффициент, чтобы при ускорении “газ в пол” колеса не издавали шум на подобие звона/неприятного свиста (шум из обмоток, т.к. срабатывает ограничение тока). Если наоборот Вы добавляете максимальный ток то увеличьте если нужно и коэффициент (если динамика разгона будет недостаточной но при этом еще нет шума из колес).
Формирование файла прошивки
После завершения настройки нужно нажать галочку внизу. Программа проверит код на ошибки и при их отсутствии создаст файл прошивки в папке с исходником по адресу hoverboard-firmware-hack-FOC-master / pio / build / VARIANT_HOVERCAR / firmware.BIN. Его мы и будем заливать в чип платы гироскутера.
Если возникают ошибки, проверяем визуально не поставили-ли чего лишнего или не удалили-ли что то нужное. Галочка запуска компиляции может отсутствовать если идет обновление компонентов Visual Studio.
Также замечены похожие платы, но немного с другой разводкой. Они встречаются очень редко, но всё же они есть. После прошивки зуммер не издает звуков – возможно у Вас именно такая плата. В послендем обновлении исходника появилась и эта версия. В config.h строки 61…66 выбираем вариант 0 – (подходит большинство плат), вариант 1 – второй, более редкий тип плат.
############################### BOARD VARIANT ###############################/* Board Variant * 0 – Default board type * 1 – Alternate board type with different pin mapping for DCLINK, Buzzer and ON/OFF, Button and Charger*/
#define BOARD_VARIANT 0
Подключение программатора к плате
Программатор ST-Link V2 подключается выводами +3,3 V, SWDIO, GND и SWCLK к соответствующим точкам на плате, как показано на рисунке ниже.
Батарею НЕ ПОДКЛЮЧАЕМ и для дополнительного обесточивания платы нажимаем кнопку включения. При попытке запуститься произойдет разряд электролитических конденсаторов на плате. Теперь можно подключить программатор.
Процесс прошивки
- Запускаем STM32 ST-LINK Utility
- Для подключения к чипу жмем Target – Connect (либо иконку серой вилки на панели управления)
Появившееся предупреждение Can not read memory!… Означает, что чтение родной прошивки недоступно, так как она защищена от чтения.
 ru\/proshivka-giroskutera-pod-ruchku-gaza\/"}»>
ru\/proshivka-giroskutera-pod-ruchku-gaza\/"}»>Придется её стереть. Внимание!!! После стирания её невозможно будет восстановить и гироскутер уже не получится обратно сделать гироскутером.
- жмем Target – Option Bytes…
Снимаем защиту от перезаписи
- в поле Read Out Protection меняем Enabled на Disabled
- жмём Apply
После завершения этой манипуляции получаем чистый чип
Теперь выбираем файл своей прошивки
- жмем Open file
Напоминаю, что по умолчанию после настроек в Visual Studio файл прошивки будет находиться по пути hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / pio / build / VARIANT_HOVERCAR / firmware. bin.
bin.
- выбираем firmware и жмём Oткрыть
- для запуска процесса прошивки жмем Target – Program & Verify…, в открывшемся окне – Start
После удачного завершения процесса в нижнем окне увидим Verifycation…OK и Programmed Memory Checksum: ******
Прошивка завершена.
Если у Вас что-то идет не так, проверьте внимательно по скриншотам наличие галочек, и прочих настроек, где они присутствуют на каждом этапе.
При последующих заливках прошивки обязательно предварительно стирайте чип кнопкой Full chip erase, иначе фрагменты старого кода будут мешать работе нового!
Подключение ручки газа и тормоза
В качестве ручки газа можно использовать велосипедные или самокатные газульки с датчиком Холла, педали, либо обычные потенциометры.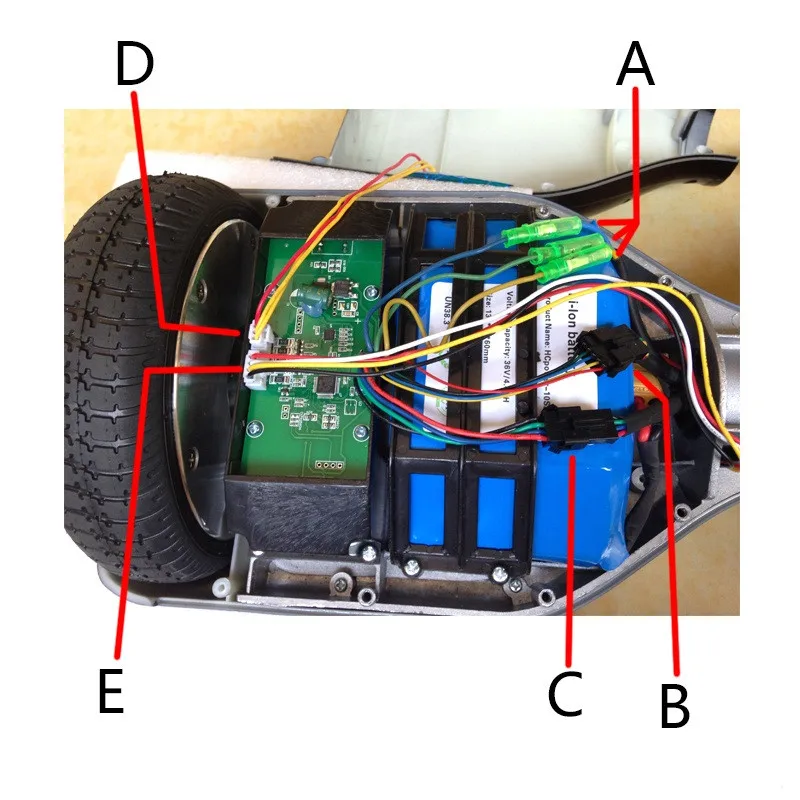 Подключение по трем проводам, как на схеме внизу. Цвета проводов на платах гироскутеров могут отличаться от приведенного примера, поэтому ориентируемся по расположению точек (пинов) на плате.
Подключение по трем проводам, как на схеме внизу. Цвета проводов на платах гироскутеров могут отличаться от приведенного примера, поэтому ориентируемся по расположению точек (пинов) на плате.
В процессе доработки платы соблюдайте осторожность и не допускайте случайных замыканий выводов компонентов токопроводящими предметами, так как даже после отключения батареи в электролитических конденсаторах сохраняется заряд!
Всвязи с тем, что обычно ручки управления выносятся далеко от платы, в проводах могут наводиться помехи, что может вызывать нестабильную работу и ложные срабатывания. Для подавления этих помех желательно повесить между сигнальными входами и GND конденсаторы ёмкостью 0,03…0,1 мкФ и резисторы сопротивлением 1…10 кОм, лучше установить их на плате.
Тормоз может не подключаться вообще, если он не нужен и в Вашей конструкции предусмотрены механические тормоза. На практике он отлично работает и в своём самодельном самокате я использую его и не стал заморачиваться с механическими. Но повесить на него резистор и конденсатор нужно обязательно! И при калибровке (о ней будет ниже) нужно показать вход тормоза сымитировав нажатие кнопки (синий провод на +3,3 В).
На практике он отлично работает и в своём самодельном самокате я использую его и не стал заморачиваться с механическими. Но повесить на него резистор и конденсатор нужно обязательно! И при калибровке (о ней будет ниже) нужно показать вход тормоза сымитировав нажатие кнопки (синий провод на +3,3 В).
При срабатывании на скорости он начинает тормозить рекуперацией, отдавая энергию в батарею. Когда скорость падает до определенного значения, при которой рекуперация становится неэффективна для торможения, контроллер наоборот вкачивает в моторы энергию батареи продолжая активное торможение до полной остановки. На всём продолжении торможения полная блокировка колес исключена и получается некий эффект ABS. Усилие торможения развивается достаточное для того чтобы почти улететь через руль при полном резком нажатии. Поэтому реализовывать его с помощью одной только кнопки – плохая идея. Для плавного дозирования торможения годится аналогичная газульке ручка на датчике Холла. Вариант подешевле – кнопка с потенциометром. Потенциометром в этом случае устанавливается требуемое усилие торможения.
Потенциометром в этом случае устанавливается требуемое усилие торможения.
Калибровка ручек газа и тормоза
Сразу после прошивки не будет никакой реакции на нажатия ручек газа и тормоза. Для того чтобы контроллер понимал, как на них реагировать, его необходимо обучить. Во время этой операции он запомнит минимальные и максимальные значения напряжений сигналов управления. Они не обязательно должны быть именно от 0 до 3,3 В и могут принимать любые значения этого диапазона, например от 0,5 В до 3 В.
Перед калибровкой необходимо убедиться, что контроллер выключен, колёса (включая фазные провода и провода от датчиков Холла), ручки газа и тормоза (если она нужна) подключены согласно схеме.
Для входа в режим калибровки нужно выполнить следующие действия:
//старые версии исходника:
- нажать и удерживать кнопку питания контроллера не менее 2 сек, в этот момент прозвучит многотональный звуковой сигнал
- кратковременно отпустить (менее секунды) и снова зажать и удерживать кнопку питания, в этот момент прозвучит короткий гудок высокого тона
- дождаться короткого гудка высокого тона
- отпустить кнопку питания
- дождаться длинного гудка низкого тона
//новые версии исходника:
- включить контроллер
- через несколько секунд зажать кнопку включения до гудка
- отпустить кнопку
Процесс калибровки:
- нажать пару раз полностью на ручку газа и отпустить
- нажать пару раз полностью на ручку тормоза и отпустить(если используется кнопка с потенциометром, то нажимать её при выкрученном потенциометре в минимальное сопротивление, чтобы показать максимальное напряжение на сигнальном проводе)
- нажать кнопку выключения
- перезагрузить контроллер и проверить реакцию на нажатия ручек управления
После успешной калибровки колёса должны соответственно реагировать на ручки газа и тормоза. Без нагрузки колёса могут в диапазоне высоких оборотов начинать вращаться рывками, если Вы применили в настройках ослабление поля и не повысили предел максимальных оборотов.
Без нагрузки колёса могут в диапазоне высоких оборотов начинать вращаться рывками, если Вы применили в настройках ослабление поля и не повысили предел максимальных оборотов.
При торможении колёса вращаются “туда – обратно” и не успокаиваются. В вывешенном состоянии колес это нормально, под нагрузкой такого не будет.
Если калибровка прошла успешно и контроллер не издает звуковых сигналов ошибки, но при этом колёса не крутятся либо крутятся медленно/с посторонними звуками, возможно необходимо подобрать правильную комбинацию фазных проводов/сигнальных проводов с датчиков Холла.
Звуковые информирующие и сигналы ошибок контроллера.
Это не все возможные настройки, а только основные которым обязательно нужно уделить внимание.
При проблемах стучите в группу, некоторые новости смотрите на канале.
Телеграмм группа “Самоделки из гироскутера”
Телеграмм канал “Самоделки из гироскутера”
Смотрите также о прошивке гироскутера под радиоуправление.
.
гироскутер | Сервисный центр
Ремонт гироскутеров в нашем СЦ «ОргТехСервис» специализируется на ремонте гироскутеров и иных видах электротранспорта. Обратившись к нашим специалистам, вы можете рассчитывать на быстрое и качественное устранение любой неисправности. Богатый опыт и широкие знания в данной области дает возможность нашим мастерам отремонтировать любую модель минисигвея. Если вы ищите, где можно сделать ремонт минисигвея в Липецке, обращайтесь в СЦ «ОргТехСервис»
Наши мастера могут выполнить следующие работы:
провести диагностику общего состояния электрического транспортного средства;
- проверить работу электроники и центральной платы;
- найти причину выхода из строя гироскутера;
- заменить неисправные детали;
- провести настройку системы;
- модернизировать ваше транспортное средство и так далее.
Если вас интересует ремонт гироскутеров, цена услуги зависит от причины поломки, сложности проблемы, стоимости запасных частей и иных факторов. Сообщить точную стоимость ремонта наши мастера могут после осмотра гироскутера.
Сообщить точную стоимость ремонта наши мастера могут после осмотра гироскутера.
Ремонт гироскутера Smart Balance
Гироскутеры Smart Balance особо популярны, поскольку отличаются простотой управления, надежностью и безопасностью. Но иногда необходим ремонт гироскутера Smart Balance, поскольку поломки могут случиться из-за неправильной эксплуатации, отсутствия своевременного обслуживания или просто из-за износа деталей.
Обратиться в сервисный центр следует в таких случаях:
- гироскутер не запускается;
- система долго загружается;
- возникли проблемы с торможением;
- отсутствует управление;
- аккумулятор не держит зарядку или быстро заряжается;
- присутствуют механические повреждения корпуса и так далее.
При наличии хотя бы одной из вышеперечисленных проблем или иных неисправностях ремонт гироскутера Smart Balance не стоит откладывать на потом. Наши специалисты в короткие сроки произведут ремонт платы гироскутера или иных составляющих оперативно, так как у нас всегда имеются необходимые запчасти на собственном складе.
Ремонт колеса гироскутера
Колеса гироскутера относятся к элементам транспортного средства, которое при передвижении постоянно испытывает нагрузку, поэтому ремонт колеса гироскутера рано или поздно будет необходим. Если вы заметили износ шин, появление механических повреждений на покрышке или колеса гироскутера спустились, обратитесь за помощью в сервисный центр «ОргТехСервис».
Наши специалисты при необходимости оперативно заменять покрышку или камеру, а также проведут иные работы. Обратите внимание, что ремонт колеса гироскутера обычно не занимает много времени и стоит недорого. Своевременный ремонт позволит избежать более серьезных поломок электрического транспортного средства.
Ремонт платы гироскутера
Нередко владельцы гироскутеров сталкиваются с проблемами выхода из строя центральной или боковой платы. Ремонт платы гироскутера должен проводиться только профессионалами. При отсутствии необходимых знаний и опыта восстановления работоспособности платы могут только усугубить ситуацию. В итоге вам все равно придется обратиться за помощью к специалистам, но ремонт обойдется в большую сумму.
В итоге вам все равно придется обратиться за помощью к специалистам, но ремонт обойдется в большую сумму.
Если вы отметили сбои в работе системе, длительную загрузку, появление ошибок или другие проблемы, указывающие на неисправность платы, обязательно обращайте в сервисный центр. Нашими специалистами будет проведен ремонт гироскутера, цена которого вас приятно удивит. При необходимости они проведут диагностику её работы и замену. Ныне ремонт гироскутера в Москве выполняют многие компании, но если для вас важно качество, надежность и гарантии, обращайтесь к нам. У нас работают высококвалифицированные мастера. Постоянное наличие всех необходимых деталей дает возможность в самые короткие сроки отремонтировать ваш электротранспорт.
Jetson Remix Light-Up Hoverboard и Go-Kart Combo за 200 долларов США для участников
Предложения с истекшим сроком действия
истек
Sam’s Club · 3 недели назад
200 долларов для участников 280 долларов
Пикап 4 доллара
подробнее
Характеристики
- Двигатель мощностью 500 Вт
- Модель: JREMIX-BLK
↑ меньше
Детали
Комментарии
Related Offers
Amazon · 3 wks ago
Jetson Knight Adult Electric Scooter
$348 $500
free shipping
more
Features
- LCD
- motion-activated thumb throttle
- easy folding mechanism
- up до 15,5 миль в час
- до 25,5 миль
- 220 фунтов. емкость
- Модель: JKNGH2
 емкость
емкостьSam’s Club · 6 дней назад
Jetson Remix Hoverboard и Go-Kart Combo
$ 150 для участников $ 280
$ 8.
БОЛЬШЕ
$
9007 5005 5005
. двигатель
LEGO · 3 часа назад
Распродажа LEGO в конце года
Скидка до 50%
бесплатная доставка по цене 35 долларов США
more
Сэкономьте на более чем 150 предметах, включая небольшие наборы и брелки всего за 5 долларов и Brickheads от 8 долларов. Большинство опций стоят менее 25 долларов. Купить сейчас в LEGO
Amazon · 1 неделю назад
Лазерный меч JVMU
43 $ 143 $
бесплатная доставка
Подробнее
Features
- 7 colors
- three sound modes
- double-edged
Amazon · 1 wk ago
1080p Foldable Drone
$34 $170
free shipping
more
Features
- 15-minute время полета
- удержание высоты
- перевороты и бочки на 360°
- запуск одной кнопкой
- широкоугольный обзор 120°
Walmart · 5 дней назад
Предложения для спорта и активного отдыха в Walmart
Скидка до 63%
бесплатная доставка с $35
подробнее
Скидки на баскетбольные ворота, рыболовные снасти, велосипеды, снаряжение для гольфа, грузы, надувные лодки джакузи, снаряжение для кемпинга и многое другое, например, Nerf Basketball Pro Over the Door Hoop с мячом за 28,94 доллара (скидка 4 доллара). В магазин Walmart
В магазин Walmart
Sam’s Club · 2 часа назад
Sam’s Club Распродажа
В магазин
бесплатная доставка с членством Plus
подробнее
Сэкономьте на большом ассортименте товаров, таких как детские пижамы, подарочные наборы, постельное белье, домашняя одежда, игрушки, упаковочные материалы, детские товары и многое другое. В магазин Sam’s Club
Sam’s Club · 1 неделю назад
BMW K1300S 12V Electric Ride-On Bike
60 $ для участников 170 $
11 $ доставка
еще
в нашем черном списке $65, ниже 1 и лучшее предложение, которое мы могли найти. Купить сейчас в Sam’s Club
показывает
- Максимальная скорость 3,7 миль в час
- 8 Звуки
- Три форварда и реверс
- Модель: TY5838RUSDC
SAM’s Club · 1 MO назад
Mive -билеты в CAM
до 400004 до 400004 до 400004 до 400004 до 400004. для участников
для участников
подробнее
Сэкономьте на билетах в кино в кинотеатры по всей стране, включая Showcase, AMC, Regal, Cinemark и другие. Магазин в Sam’s Club
Особенности
- включает в себя 7 театральных трупп с сотнями мест каждая
Sam’s Club · 1 неделю назад
Sam’s Club Скидки и скидки
Скидки на матрасы, мебель, технику и многое другое
бесплатная доставка с Plus
еще
потребности, безрецептурные лекарства, динамики, игровые приставки, одежду, канцелярские товары и многое другое. В магазин Sam’s Club
Анализ цен
| Скидка | Цена последней сделки | Текущая цена | ||
|---|---|---|---|---|
| Клуб Сэма | 200 долл. США (эксп. 6 дней назад) США (эксп. 6 дней назад) | — | Проверить цену |
за бортом (2018) — IMDB
- Награды
- 3 побед и 7 номинаций
видео
Трейлер 2:09
9000
0012 Трейлер 2:24
Смотреть Официальный трейлер
Клип 1:27
Смотреть Капитан Я все еще на борту
Клип 0:57
Смотреть Ты ужасный человек
Клип Я уверена 1:03
5 Ive Never Worked Construction
Клип 1:06
Смотреть Я люблю, когда он танцует
Клип 1:11
Смотреть For Better Or Worse Baby
Интервью 6:26
Смотреть Интервью Евы Лонгории и Мела Родригеса 906 102 906 :26
Watch Eva Longoria и Mel Rodriguez
Интервью 5:40
Смотрите Анну Фарис и Евгенио Дербез
Интервью 5:40
Смотреть Анна Фарис и Евженио Дербез
Интервью 4:22
.
Top cast
Eugenio Derbez
- Leonardo Montenegro
Anna Faris
- Kate Sullivan
Eva Longoria
- Theresa
John Hannah
Swoosie Kurtz
Mel Rodriguez
Josh Segarra
Hannah Nordberg
- Emily Sullivan
Alyvia Alyn Lind
- Olivia Sullivan
Payton Lepinski
- Molly Sullivan
Fernando Лухан
Сесилия Суарес
- Магдалена
Мариана Тревиньо
Хесус Очоа
Омар Чапарро
Adrian Uribe
- Burrito
Edgar Vivar
- Gastroenterologist
Per Graffman
- Captain
- Rob Greenberg
- Bob Fisher(screenplay by)
- Rob Greenberg( сценарий)
- Лесли Диксон (сценарий) (рассказ)
- Все актеры и съемочная группа
- Производство, кассовые сборы и многое другое на IMDbPro
Больше похоже на это
Как быть латиноамериканским любовником
За бортом
Инструкции не включены
Служащий
Какой у вас номер?
Шпион, который бросил меня
The House Bunny
Блокировщики
Мгновенный семейство
Ночная школа
за борт
Hot Presuit
Сюжетная линия
.

Кейт: Ничего
Молли: Можно мне одну?
Обзоры пользователей455
Обзор
Избранный обзор
8/
10
Мило смешно
Оригинальный Overboard — один из моих любимых ромкомов. Если вам понравился оригинал, я думаю, вам понравится и этот. В нем та же милая глупость, а обмен гендерными ролями был современным подходом. Это не шедевр, но и не первый. Расслабьтесь и позвольте себе насладиться этим!
полезно•47
36
- Caroledelahunty
- 7 мая 2018
IMDB BEST OF 2022
IMDB BEST OF 2022
Откройте для себя звезды, которые выскочили на IMDB STARMETER в этом году, и объясняют, что лучше всего из 2022; включая лучшие трейлеры, плакаты и фотографии.
Подробнее
Подробнее
- Дата выпуска
- 4 мая 2018 г. (США)
- 4 мая 2018 г.
- США
- 5
- Lionsgate
- English
- Norwegian
- Spanish
- French
- Also known as
- Amor a la deriva
- Steveston, Richmond, British Columbia, Canada
- Производственные компании
- Metro-Goldwyn-Mayer (MGM)
- Pantelion Films
- 3Pas Studios
- См.
 (США)
(США)9

