Dc brushless: DC Brushless Fan & Blower
Содержание
DC Brushless Fan & Blower
Выберите подкатегорию
MF17080V1-10000-A99
SN-0001
<—>Подробнее: id товара: 24680, наименование MF17080V1-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF17080V2-10000-A99
SN-0002
<—>Подробнее: id товара: 24681, наименование MF17080V2-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF20080V1-10000-A99
SN-0003
<—>Подробнее: id товара: 24682, наименование MF20080V1-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF20080V2-10000-A99
SN-0004
<—>Подробнее: id товара: 24683, наименование MF20080V2-10000-A99, # 2355, . .
.
Цена по запросу
Наличие:
Цена по запросу
MF20100V1-10000-A99
SN-0005
<—>Подробнее: id товара: 24684, наименование MF20100V1-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF20100V2-10000-A99
SN-0006
<—>Подробнее: id товара: 24685, наименование MF20100V2-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF25060V1-10000-A99
SN-0007
<—>Подробнее: id товара: 24686, наименование MF25060V1-10000-A99, # 2355, . .
.
Цена по запросу
Наличие:
Цена по запросу
MF25060V2-10000-A99
SN-0008
<—>Подробнее: id товара: 24687, наименование MF25060V2-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF25100V1-10000-A99
SN-0009
<—>Подробнее: id товара: 24688, наименование MF25100V1-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF25100V2-10000-A99
SN-0010
<—>Подробнее: id товара: 24689, наименование MF25100V2-10000-A99, # 2355, . .
.
Цена по запросу
Наличие:
Цена по запросу
MF25100V3-10000-A99
SN-0011
<—>Подробнее: id товара: 24690, наименование MF25100V3-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF25101V1-10000-A99
SN-0012
<—>Подробнее: id товара: 24691, наименование MF25101V1-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF25101V2-10000-A99
SN-0013
<—>Подробнее: id товара: 24692, наименование MF25101V2-10000-A99, # 2355, . .
.
Цена по запросу
Наличие:
Цена по запросу
MF25101V3-10000-A99
SN-0014
<—>Подробнее: id товара: 24693, наименование MF25101V3-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF25150V1-10000-A99
SN-0015
<—>Подробнее: id товара: 24694, наименование MF25150V1-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF25150V2-10000-A99
SN-0016
<—>Подробнее: id товара: 24695, наименование MF25150V2-10000-A99, # 2355, .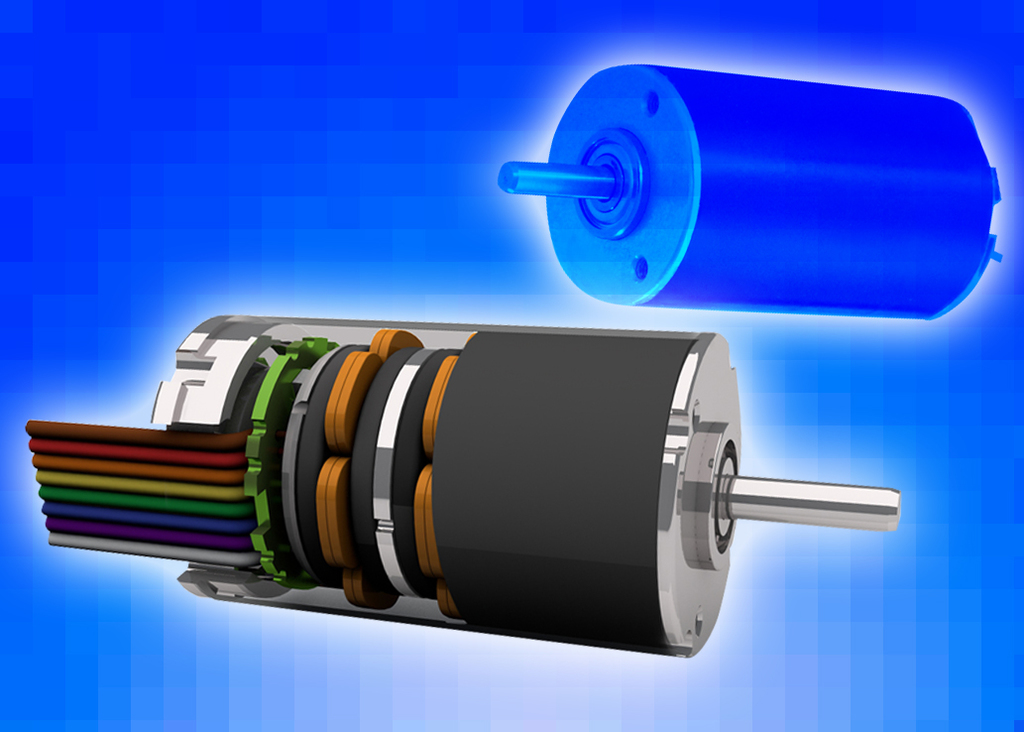 .
.
Цена по запросу
Наличие:
Цена по запросу
MF25150V3-10000-A99
SN-0017
<—>Подробнее: id товара: 24696, наименование MF25150V3-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF30060V1-10000-A99
SN-0018
<—>Подробнее: id товара: 24697, наименование MF30060V1-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF30060V2-10000-A99
SN-0019
<—>Подробнее: id товара: 24698, наименование MF30060V2-10000-A99, # 2355, . .
.
Цена по запросу
Наличие:
Цена по запросу
MF30100V1-10000-A99
SN-0020
<—>Подробнее: id товара: 24699, наименование MF30100V1-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF30100V2-10000-A99
SN-0021
<—>Подробнее: id товара: 24700, наименование MF30100V2-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF30100V3-10000-A99
SN-0022
<—>Подробнее: id товара: 24701, наименование MF30100V3-10000-A99, # 2355, . .
.
Цена по запросу
Наличие:
Цена по запросу
MF30101V1-10000-A99
SN-0023
<—>Подробнее: id товара: 24702, наименование MF30101V1-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
MF30101V2-10000-A99
SN-0024
<—>Подробнее: id товара: 24703, наименование MF30101V2-10000-A99, # 2355, ..
Цена по запросу
Наличие:
Цена по запросу
Показано с 1 по 24 из 329 (всего 14 страниц)
Brushless dc в категории «Техника и электроника»
Оригинальный вентилятор для ноутбука ASUS VivoBook Max X541NA, X541NC, DC 5V 0. 5A, 4pin (FCN BRUSHLESS MOTOR
5A, 4pin (FCN BRUSHLESS MOTOR
На складе
Доставка по Украине
474 грн
Купить
Оригинальный вентилятор для ноутбука SONY VGN-BX640P, VGN-BX660, VGN-PBX560, DC05V 0.225A, 3pin (BRUSHLESS
На складе
Доставка по Украине
59 грн
Купить
Оригинальный вентилятор для ноутбука ACER TRAVELMATE 8100 series, DC 5V 0.19A, 3pin (BRUSHLESS UDQFZEH01CQU)
На складе
Доставка по Украине
130 грн
Купить
Оригинальный вентилятор для ноутбука ASUS G75VW, G75VX (ДЛЯ ПРОЦЕССОРА), DC 05V 0.37A, 4pin (BRUSHLESS
На складе
Доставка по Украине
303 грн
Купить
Оригинальный вентилятор для ноутбука TOSHIBA Satellite L630, L635, DC 5V 0.38A, 3pin (BRUSHLESS
На складе
Доставка по Украине
51 грн
Купить
Оригинальный вентилятор для ноутбука HP COMPAQ NX5000 (AROUND), NC6000, NX6000, NC8000, DC 5V 0. 22A, 3pin
22A, 3pin
На складе
Доставка по Украине
111 грн
Купить
Оригинальный вентилятор для ноутбука SONY VGN-BX640P, VGN-BX660, VGN-PBX560, DC05V 0.225A, 3pin (BRUSHLESS
На складе
Доставка по Украине
59 грн
Купить
Оригинальный вентилятор для ноутбука SONY VGN-NR series, DC 5V 0.29A, 3pin (BRUSHLESS UDQFRPR63CF0) (Кулер)
На складе
Доставка по Украине
59 грн
Купить
Оригинальный вентилятор для ноутбука HP PAVILION DV4-1000, DV4T, CQ40, CQ45, CQ41 (AMD CPU FAN), DC 5V 0.4A,
На складе
Доставка по Украине
61 грн
Купить
Оригинальный вентилятор для ноутбука ASUS S96J, Z96, Z96F, Z96J, Z96JS, DC 5V 0.33A, 4pin (BRUSHLESS
На складе
Доставка по Украине
76 грн
Купить
Оригинальный вентилятор для ноутбука ASUS UL20A (ВЕРСИЯ 2), DC 5V 0. 4A, 3pin (BRUSHLESS KSB06105HA) (Кулер)
4A, 3pin (BRUSHLESS KSB06105HA) (Кулер)
На складе
Доставка по Украине
172 грн
Купить
Оригинальный вентилятор для ноутбука SAMSUNG RF410, RF411, DC 05V 0.40A, 3pin (BRUSHLESS KSB0705HA-AK1Y)
На складе
Доставка по Украине
140 грн
Купить
Оригинальный вентилятор для ноутбука ASUS M5000, M5N, S5200 series, DC 5V 0.21A, 3pin (BRUSHLESS UDQF2Ph21FQU)
На складе
Доставка по Украине
76 грн
Купить
Оригинальный вентилятор для ноутбука HP ELITEBOOK 1040 G1, DC 5V 0.5A, 4pin (CPU FAN) (BRUSHLESS
На складе
Доставка по Украине
95 грн
Купить
Оригинальный вентилятор для ноутбука ASUS S96J, Z96, Z96F, Z96J, Z96JS, DC 5V 0.33A, 4pin (BRUSHLESS
На складе
Доставка по Украине
76 грн
Купить
Смотрите также
Оригинальный вентилятор для ноутбука SAMSUNG RF410, RF411, DC 05V 0. 40A, 3pin (BRUSHLESS KSB0705HA-AK1Y)
40A, 3pin (BRUSHLESS KSB0705HA-AK1Y)
Доставка по Украине
165 грн
Купить
Оригинальный вентилятор для ноутбука SAMSUNG X06, DC 5V 0.16A, 3pin (ADDA BRUSHLESS AD0405HB-HB3 CW4Y85-GD)
Доставка по Украине
163 грн
Купить
Оригинальный вентилятор для ноутбука ASUS X550DP, DC 5V 0.5A, 3pin (BRUSHLESS DFS531105MC0T, 13NB01N1AM0102)
На складе
Доставка по Украине
550 грн
Купить
Оригинальный вентилятор для ноутбука HP COMPAQ 650, 655, CQ58, G58, DC 5V 0.45A, 4pin (BRUSHLESS
Доставка по Украине
167 — 191 грн
от 7 продавцов
167 грн
Купить
Оригинальный вентилятор для ноутбука HP PAVILION DM4-2000 series, DC 05V 0.35A, 3pin (BRUSHLESS
Доставка по Украине
144 — 165 грн
от 8 продавцов
144 грн
Купить
Оригинальный вентилятор для ноутбука HP PAVILION DM4-3000 series, DC 5V 0.35A, 3pin (BRUSHLESS
Доставка по Украине
239 — 274 грн
от 8 продавцов
239 грн
Купить
Оригинальный вентилятор для ноутбука ASUS G74SX, DC05V 0. 40A, 4pin (BRUSHLESS KSB06105HB-BA82) (Кулер)
40A, 4pin (BRUSHLESS KSB06105HB-BA82) (Кулер)
Доставка по Украине
304 — 347 грн
от 7 продавцов
304 грн
Купить
Оригинальный вентилятор для ноутбука ASUS UL20A (ВЕРСИЯ 2), DC 5V 0.4A, 4pin (BRUSHLESS KSB06105HA) (Кулер)
Доставка по Украине
180 — 206 грн
от 8 продавцов
180 грн
Купить
Оригинальный вентилятор для ноутбука ASUS A3000, M6800, A6000, Z7000, Z9100, DC 5V 0.19A, 3pin (BRUSHLESS
Доставка по Украине
61 грн
Купить
Оригинальный вентилятор для ноутбука ASUS A9RP, Z94RP, DC 05V 0.37A, 3pin (BRUSHLESS KDB05105HB-H902,
Доставка из г. Одесса
168 грн
Купить
Одесса
Оригинальный вентилятор для ноутбука ASUS G55VW, DC 05V 0.40A, 4pin+4pin (BRUSHLESS KSB06105HB-BL2Q,
Доставка из г. Одесса
148.05 грн
Купить
Одесса
Оригинальный вентилятор для ноутбука ASUS G74SX, DC05V 0.40A, 4pin (BRUSHLESS KSB06105HB-BA82) (Кулер)
Доставка из г. Одесса
Одесса
319.20 грн
Купить
Одесса
Оригинальный вентилятор для ноутбука ASUS UL30A, X32A, U35JC, DC 05V 0.37A, 4pin (BRUSHLESS KDB05105HB-H902,
Доставка из г. Одесса
302.40 грн
Купить
Одесса
УЦЕНКА! ОТЛОМАНО КРЕПЛЕНИЕ! Вентилятор для ноутбука ASUS X550DP, DC 5V 0.5A, 3pin (BRUSHLESS DFS531105MC0T,
Доставка по Украине
148 — 170 грн
от 8 продавцов
148 грн
Купить
Бесколлекторные и щеточные двигатели постоянного тока: когда и почему лучше выбрать один из них | Артикул
Pete Millett
ЗАГРУЗИТЬ PDF
Получайте ценные ресурсы прямо на свой почтовый ящик — рассылка раз в месяц
Подписаться
Мы ценим вашу конфиденциальность . Поскольку реализовать системы управления с использованием двигателей постоянного тока проще, чем с двигателями переменного тока, они часто используются, когда необходимо контролировать скорость, крутящий момент или положение.
Существует два типа широко используемых двигателей постоянного тока: коллекторные двигатели и бесщеточные двигатели (или двигатели BLDC). Как следует из их названий, щеточные двигатели постоянного тока имеют щетки, которые используются для коммутации двигателя, чтобы заставить его вращаться. Бесщеточные двигатели заменяют функцию механической коммутации электронным управлением.
Во многих случаях можно использовать коллекторный или бесщеточный двигатель постоянного тока. Они функционируют на основе тех же принципов притяжения и отталкивания между катушками и постоянными магнитами. У обоих есть преимущества и недостатки, которые могут заставить вас выбрать один из них, в зависимости от требований вашего приложения.
Коллекторные двигатели постоянного тока
Коллекторные двигатели постоянного тока (изображение предоставлено maxon group)
В двигателях постоянного тока для создания магнитного поля используются витки проволоки. В щеточном двигателе эти катушки могут свободно вращаться, приводя в движение вал — они являются частью двигателя, которая называется «ротор». Обычно катушки наматываются на железный сердечник, хотя есть и щеточные двигатели без сердечника, в которых обмотка является самоподдерживающейся.
Обычно катушки наматываются на железный сердечник, хотя есть и щеточные двигатели без сердечника, в которых обмотка является самоподдерживающейся.
Неподвижная часть двигателя называется «статором». Постоянные магниты используются для создания стационарного магнитного поля. Обычно эти магниты располагаются на внутренней поверхности статора снаружи ротора.
Чтобы создать крутящий момент, который заставляет ротор вращаться, магнитное поле ротора должно непрерывно вращаться, чтобы его поле притягивало и отталкивало неподвижное поле статора. Чтобы заставить поле вращаться, используется скользящий электрический переключатель. Переключатель состоит из коммутатора, который обычно представляет собой сегментированный контакт, закрепленный на роторе, и неподвижных щеток, закрепленных на статоре.
По мере вращения ротора различные наборы обмоток ротора постоянно включаются и выключаются коммутатором. Это заставляет катушки ротора постоянно притягиваться и отталкиваться от неподвижных магнитов статора, что заставляет ротор вращаться.
Поскольку существует некоторое механическое трение между щетками и коллектором, а так как это электрический контакт, его, как правило, нельзя смазывать, в течение срока службы двигателя происходит механический износ щеток и коллектора. Этот износ в конечном итоге достигнет точки, когда двигатель больше не работает. Многие щеточные двигатели, особенно большие, имеют сменные щетки, обычно сделанные из углерода, которые предназначены для поддержания хорошего контакта по мере износа. Эти двигатели требуют периодического обслуживания. Даже со сменными щетками со временем коллектор также изнашивается до такой степени, что двигатель необходимо заменить.
Для привода щеточного двигателя на щетки подается постоянное напряжение, которое пропускает ток через обмотки ротора, заставляя двигатель вращаться.
В тех случаях, когда требуется вращение только в одном направлении, а скорость или крутящий момент не нужно контролировать, для коллекторного двигателя вообще не требуется приводной электроники. В подобных приложениях напряжение постоянного тока просто включается и выключается, чтобы заставить двигатель работать или останавливаться. Это типично для недорогих приложений, таких как моторизованные игрушки. Если требуется реверс, это можно сделать с помощью двухполюсного выключателя.
В подобных приложениях напряжение постоянного тока просто включается и выключается, чтобы заставить двигатель работать или останавливаться. Это типично для недорогих приложений, таких как моторизованные игрушки. Если требуется реверс, это можно сделать с помощью двухполюсного выключателя.
Для облегчения управления скоростью, крутящим моментом и направлением используется «H-мост», состоящий из электронных переключателей — транзисторов, IGBT или MOSFET, — позволяющий двигателю вращаться в любом направлении. Это позволяет подавать напряжение на двигатель любой полярности, что заставляет двигатель вращаться в противоположных направлениях. Скоростью двигателя или крутящим моментом можно управлять с помощью широтно-импульсной модуляции одного из переключателей.
Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока (изображение предоставлено maxon group)
Бесщеточные двигатели постоянного тока работают по тому же принципу магнитного притяжения и отталкивания, что и щеточные двигатели, но имеют несколько иную конструкцию. Вместо механического коммутатора и щеток магнитное поле статора вращается с помощью электронной коммутации. Это требует использования активной управляющей электроники.
Вместо механического коммутатора и щеток магнитное поле статора вращается с помощью электронной коммутации. Это требует использования активной управляющей электроники.
В бесщеточном двигателе к ротору прикреплены постоянные магниты, а к статору — обмотки. Бесщеточные двигатели могут быть сконструированы с ротором внутри, как показано выше, или с ротором снаружи обмоток (иногда его называют двигателем с опережением).
Количество обмоток, используемых в бесщеточном двигателе, называется количеством фаз. Хотя бесщеточные двигатели могут иметь разное количество фаз, трехфазные бесщеточные двигатели являются наиболее распространенными. Исключением являются небольшие охлаждающие вентиляторы, которые могут использовать только одну или две фазы.
Три обмотки бесщеточного двигателя соединены по схеме «звезда» или «треугольник». В любом случае к двигателю подключаются три провода, а технология привода и форма сигнала идентичны.
Трехфазные двигатели могут быть сконструированы с различными магнитными конфигурациями, называемыми полюсами. Простейшие трехфазные двигатели имеют два полюса: ротор имеет только одну пару магнитных полюсов, один северный и один южный. Двигатели также могут быть построены с большим количеством полюсов, что требует большего количества магнитных секций в роторе и большего количества обмоток в статоре. Большее количество полюсов может обеспечить более высокую производительность, хотя очень высокие скорости лучше достигаются при меньшем количестве полюсов.
Простейшие трехфазные двигатели имеют два полюса: ротор имеет только одну пару магнитных полюсов, один северный и один южный. Двигатели также могут быть построены с большим количеством полюсов, что требует большего количества магнитных секций в роторе и большего количества обмоток в статоре. Большее количество полюсов может обеспечить более высокую производительность, хотя очень высокие скорости лучше достигаются при меньшем количестве полюсов.
Для привода трехфазного бесщеточного двигателя каждая из трех фаз должна быть подключена либо к входному напряжению питания, либо к земле. Для этого используются три схемы привода «полумост», каждая из которых состоит из двух ключей. Переключатели могут быть биполярными транзисторами, IGBT или MOSFET, в зависимости от требуемого напряжения и тока.
Существует ряд методов привода, которые можно использовать для трехфазных бесщеточных двигателей. Самые простые называются трапециевидной, блочной или 120-градусной коммутацией. Трапециевидная коммутация чем-то похожа на метод коммутации, используемый в щеточном двигателе постоянного тока. В этой схеме в любой момент времени одна из трех фаз соединена с землей, одна оставлена разомкнутой, а другая подключена к напряжению питания. Если требуется управление скоростью или крутящим моментом, обычно фаза, подключенная к источнику питания, модулируется по ширине импульса. Поскольку фазы переключаются резко в каждой точке коммутации, а вращение ротора постоянно, при вращении двигателя возникает некоторое изменение крутящего момента (называемое пульсацией крутящего момента).
В этой схеме в любой момент времени одна из трех фаз соединена с землей, одна оставлена разомкнутой, а другая подключена к напряжению питания. Если требуется управление скоростью или крутящим моментом, обычно фаза, подключенная к источнику питания, модулируется по ширине импульса. Поскольку фазы переключаются резко в каждой точке коммутации, а вращение ротора постоянно, при вращении двигателя возникает некоторое изменение крутящего момента (называемое пульсацией крутящего момента).
Для повышения производительности можно использовать другие методы коммутации. Синусоидальная или 180-градусная коммутация постоянно пропускает ток через все три фазы двигателя. Электроника привода генерирует синусоидальный ток через каждую фазу, каждая из которых смещена на 120 градусов относительно другой. Этот метод привода сводит к минимуму пульсации крутящего момента, а также акустический шум и вибрацию и часто используется для высокопроизводительных или высокоэффективных приводов.
Чтобы правильно вращать поле, управляющая электроника должна знать физическое положение магнитов на роторе относительно статора. Часто информацию о положении получают с помощью датчиков Холла, установленных на статоре. Когда магнитный ротор вращается, датчики Холла улавливают магнитное поле ротора. Эта информация используется электроникой привода для пропускания тока через обмотки статора в такой последовательности, которая заставляет ротор вращаться.
Часто информацию о положении получают с помощью датчиков Холла, установленных на статоре. Когда магнитный ротор вращается, датчики Холла улавливают магнитное поле ротора. Эта информация используется электроникой привода для пропускания тока через обмотки статора в такой последовательности, которая заставляет ротор вращаться.
Используя три датчика Холла, трапециевидную коммутацию можно реализовать с помощью простой комбинационной логики, поэтому нет необходимости в сложной управляющей электронике. Другие методы коммутации, такие как синусоидальная коммутация, требуют немного более сложной управляющей электроники и обычно используют микроконтроллер.
Помимо обеспечения обратной связи по положению с помощью датчиков Холла, существуют различные методы, которые можно использовать для определения положения ротора без датчиков. Самый простой способ — контролировать противо-ЭДС на невозбужденной фазе, чтобы измерить магнитное поле относительно статора. Более сложный алгоритм управления, называемый Field Oriented Control или FOC, вычисляет положение на основе токов ротора и других параметров. FOC обычно требует довольно мощного процессора, так как многие вычисления должны выполняться очень быстро. Это, конечно, дороже, чем простой трапециевидный способ управления.
FOC обычно требует довольно мощного процессора, так как многие вычисления должны выполняться очень быстро. Это, конечно, дороже, чем простой трапециевидный способ управления.
Коллекторные и бесщеточные двигатели: преимущества и недостатки
В зависимости от области применения существуют причины, по которым вы можете предпочесть бесщеточный двигатель щеточному двигателю. В следующей таблице приведены основные преимущества и недостатки каждого типа двигателя:
| Коллекторный двигатель | Бесщеточный двигатель | |
| Срок службы | Короткая (изнашиваются щетки) | Длинный (без щеток) |
| Скорость и ускорение | Средний | Высокий |
| Эффективность | Средний | Высокий |
| Электрический шум | Шумный (дуговой) | Тихий |
| Акустический шум и пульсация крутящего момента | Бедный | Средний (трапециевидный) или хороший (синусоидальный) |
| Стоимость | Самый низкий | Средний (добавленная электроника) |
Срок службы
Как упоминалось ранее, одним из недостатков щеточных двигателей является механический износ щеток и коллектора. В частности, угольные щетки являются жертвенными, и во многих двигателях они предназначены для периодической замены в рамках программы технического обслуживания. Мягкая медь коллектора также медленно изнашивается щетками и в конечном итоге достигает точки, когда двигатель больше не работает. Поскольку бесщеточные двигатели не имеют подвижных контактов, они не подвержены такому износу.
В частности, угольные щетки являются жертвенными, и во многих двигателях они предназначены для периодической замены в рамках программы технического обслуживания. Мягкая медь коллектора также медленно изнашивается щетками и в конечном итоге достигает точки, когда двигатель больше не работает. Поскольку бесщеточные двигатели не имеют подвижных контактов, они не подвержены такому износу.
Скорость и ускорение
Скорость вращения щеточных двигателей может быть ограничена щетками и коллектором, а также массой ротора. На очень высоких скоростях контакт щетки с коллектором может стать неустойчивым, и искрение щетки увеличится. В большинстве щеточных двигателей также используется сердечник из многослойного железа в роторе, что придает им большую инерцию вращения. Это ограничивает скорость разгона и торможения двигателя. Можно построить бесщеточный двигатель с очень мощными редкоземельными магнитами на роторе, что минимизирует инерцию вращения. Конечно, это увеличивает стоимость.
Электрические помехи
Щетки и коллектор образуют своего рода электрический переключатель. При вращении двигателя переключатели размыкаются и замыкаются, а через обмотки ротора, которые являются индуктивными, протекает значительный ток. Это приводит к искрению на контактах. Это создает большое количество электрических помех, которые могут попасть в чувствительные цепи. Возникновение дуги можно несколько уменьшить, добавив конденсаторы или гасители RC на щетках, но мгновенное переключение коммутатора всегда вызывает электрический шум.
Акустический шум
Коллекторные двигатели имеют «жесткое переключение», то есть ток резко переходит с одной обмотки на другую. Создаваемый крутящий момент меняется в зависимости от вращения ротора, когда обмотки включаются и выключаются. В бесщеточном двигателе можно управлять токами обмоток таким образом, чтобы ток постепенно переходил от одной обмотки к другой. Это снижает пульсацию крутящего момента, которая представляет собой механическую пульсацию энергии на роторе. Пульсации крутящего момента вызывают вибрацию и механический шум, особенно при низких скоростях вращения ротора.
Пульсации крутящего момента вызывают вибрацию и механический шум, особенно при низких скоростях вращения ротора.
Стоимость
Поскольку бесщеточные двигатели требуют более сложной электроники, общая стоимость бесщеточного привода выше, чем у щеточного двигателя. Несмотря на то, что бесщеточный двигатель проще в производстве, чем щеточный двигатель, поскольку в нем отсутствуют щетки и коммутатор, технология щеточного двигателя является очень зрелой, а производственные затраты низки. Ситуация меняется по мере того, как бесщеточные двигатели становятся все более популярными, особенно в крупносерийном производстве, например, в автомобильных двигателях. Кроме того, стоимость электроники, такой как микроконтроллеры, продолжает снижаться, что делает бесколлекторные двигатели более привлекательными.
Резюме
Из-за снижения стоимости и повышения производительности бесщеточные двигатели становятся все более популярными во многих областях применения. Но есть еще места, где щеточные двигатели имеют больше смысла.
Многому можно научиться, глядя на внедрение бесколлекторных двигателей в автомобилях. По состоянию на 2020 год большинство двигателей, которые работают всякий раз, когда работает автомобиль, такие как насосы и вентиляторы, перешли с щеточных двигателей на бесщеточные для повышения их надежности. Дополнительная стоимость двигателя и электроники более чем компенсирует более низкий уровень отказов в полевых условиях и снижение требований к техническому обслуживанию.
С другой стороны, двигатели, которые используются нечасто, например, двигатели, приводящие в движение сиденья с электроприводом и электрические стеклоподъемники, остались преимущественно щеточными. Причина в том, что общее время работы в течение срока службы автомобиля очень мало, и очень маловероятно, что двигатели откажут в течение срока службы автомобиля.
По мере того, как стоимость бесщеточных двигателей и связанной с ними электроники продолжает снижаться, бесщеточные двигатели находят применение в приложениях, которые традиционно использовались щеточными двигателями. В качестве еще одного примера из автомобильного мира: двигатели регулировки сидений в картах высокого класса используют бесщеточные двигатели, поскольку они создают меньший акустический шум.
В качестве еще одного примера из автомобильного мира: двигатели регулировки сидений в картах высокого класса используют бесщеточные двигатели, поскольку они создают меньший акустический шум.
Технический форум
Решено: MAQ473 накапливает ошибку измерения угла во время движения?
Здравствуйте,
Я создаю прототип системы с помощью MAQ473 и наблюдаю неожиданный результат. Когда система движется периодически, изме…
ПРИВОДЫ ДВИГАТЕЛЕЙ/ДАТЧИКИ
Подходит ли MP6541 для двигателей PMSM с алгоритмом управления FOC?
Привет,
Мы планируем выбрать MP6541/A для трехфазного драйвера двигателя постоянного тока с алгоритмом FOC. Мы будем использовать его SOA, SOB, SOC для измерения фазного тока и использовать т…
ПРИВОДЫ ДВИГАТЕЛЕЙ/ДАТЧИКИ
MCS1823 — возможность перегрузки
Я хочу использовать устройство MCS1823 на 5 А для измерения тока, но я ожидаю, что пики тока будут достигать 25 А.
Могу ли я использовать версию 5A или мне нужно использовать более высокую…
ДВИГАТЕЛИ/ДАТЧИКИ
Получить техническую поддержку
Бесщеточные двигатели постоянного тока | Двигатели постоянного тока BLDC от NANOTEC
Бесщеточные двигатели постоянного тока, сокращенно двигатели BLDC, несмотря на свое название, представляют собой трехфазные синхронные машины: ротор следует за магнитным вращательным полем, а движение синхронно с напряжением переменного тока, приложенным к обмоткам. Этот тип двигателя часто называют «бесщеточным двигателем постоянного тока», потому что во многих случаях он заменяет двигатели постоянного тока щетками (щеточные двигатели постоянного тока или коллекторные двигатели). В коллекторном двигателе постоянного тока подается напряжение постоянного тока, генерирующее переменный ток, не зависящий от скорости, с помощью механического инвертора в двигателе — щеток.
Вместе с электронным контроллером привода, который берет на себя управление работой щеток и преобразует подаваемый постоянный ток в переменный, двигатель BLDC обеспечивает производительность, сравнимую с работой коллекторного двигателя постоянного тока — без щеток, которые имеют ограниченный срок службы. Поэтому двигатели BLDC также называют двигателями EC (с электронной коммутацией), чтобы отличить их от двигателей с механической коммутацией и щетками.
Поэтому двигатели BLDC также называют двигателями EC (с электронной коммутацией), чтобы отличить их от двигателей с механической коммутацией и щетками.
Другим часто используемым термином является синхронный двигатель с постоянными магнитами. Здесь «постоянный магнит» используется, чтобы отличить его от других синхронных двигателей, которые работают с обмоткой возбуждения на роторе, тогда как BLDC постоянно находится под напряжением. Другими словами, ротор двигателя создает магнитное поле с помощью постоянного магнита, даже если статор не находится под напряжением.
Термины PMSM и BLDC часто сопоставляют, чтобы различать двигатели PMSM с синусоидальным индуктивным напряжением (противо-ЭДС) и двигатели BLDC с трапециевидным индуктивным напряжением (см. ниже). Сегодня большинство двигателей BLDC демонстрируют синусоидальную противоЭДС.
1. Структура/типы
Большинство двигателей BLDC представляют собой «двигатели с внутренним ротором», в которых ротор вращается с помощью постоянных магнитов на валу в неподвижном статоре с катушками. В «двигателях с внешним ротором» статор расположен внутри, а ротор состоит из вращающегося снаружи колоколообразного корпуса, в котором установлены магниты.
В «двигателях с внешним ротором» статор расположен внутри, а ротор состоит из вращающегося снаружи колоколообразного корпуса, в котором установлены магниты.
Преимущества двигателей с внутренним ротором заключаются в низкой инерции ротора и лучшем рассеивании тепла. Напротив, в двигателях с внешним ротором теплогенерирующие катушки изолированы от окружающей среды корпусом ротора и магнитами. Из-за высокого момента инерции ротора и того факта, что корпус ротора с трудом поддается балансировке, двигатели с внешним ротором не подходят для очень высоких скоростей вращения.
Соответственно, двигатели с внутренним ротором используются в большинстве промышленных применений. Двигатели с внешним ротором демонстрируют свои преимущества при серийном применении, поскольку их производство дешевле. Их также можно сделать короче и обычно они имеют меньший момент фиксации, а также более высокий крутящий момент — благодаря большему диаметру ротора при той же магнитной силе.
Оба двигателя обычно имеют три фазы. Однако существуют также конструкции с одной или двумя фазами. Далее будут описаны только трехфазные двигатели BLDC, потому что Nanotec производит только их.
Однако существуют также конструкции с одной или двумя фазами. Далее будут описаны только трехфазные двигатели BLDC, потому что Nanotec производит только их.
Двигатели с внутренним и внешним ротором изготавливаются с щелевыми обмотками; здесь провод обмотки наматывается на башмаки полюсов статора (железный сердечник), что позволяет линиям магнитного поля обмотки вытекать и концентрироваться в определенной форме. Статор состоит из тонких, смещенных друг к другу изолированных металлических пластин для сведения к минимуму потерь на вихревые токи.
Двигатели BLDC без пазов представляют собой особый тип двигателя с внутренним ротором, который очень популярен в очень маленьких двигателях. Их статоры состоят только из кольцеобразных металлических пластин, а внутри закреплена плоская, склеенная или герметизированная обмотка. Поскольку нет железного сердечника, индуктивность двигателя очень мала и ток в обмотках быстро возрастает. Кроме того, потери в железе значительно снижены, а двигатели имеют более высокий КПД. При медленной работе положительно сказывается отсутствие пульсаций крутящего момента. В отличие от стандартных двигателей BLDC, магнитное поле не усиливается на полюсных башмаках и отсутствует фиксирующий крутящий момент. Этот тип конструкции особенно важен для двигателей диаметром менее 40 мм, так как их удельная мощность значительно выше, чем у щелевых двигателей. Это связано с тем, что в результате производства у щелевых двигателей относительно большая часть статора всегда остается незаполненной между обмотками. С другой стороны, в двигателях без пазов это пространство может быть полностью заполнено медной обмоткой. Чем меньше диаметр двигателей, тем более важным становится это преимущество бесщелевых двигателей.
При медленной работе положительно сказывается отсутствие пульсаций крутящего момента. В отличие от стандартных двигателей BLDC, магнитное поле не усиливается на полюсных башмаках и отсутствует фиксирующий крутящий момент. Этот тип конструкции особенно важен для двигателей диаметром менее 40 мм, так как их удельная мощность значительно выше, чем у щелевых двигателей. Это связано с тем, что в результате производства у щелевых двигателей относительно большая часть статора всегда остается незаполненной между обмотками. С другой стороны, в двигателях без пазов это пространство может быть полностью заполнено медной обмоткой. Чем меньше диаметр двигателей, тем более важным становится это преимущество бесщелевых двигателей.
Двигатель с внутренним ротором Двигатель с постоянным ротором Двигатель постоянного тока без пазов
2. Управление/коммутация двигателя
Двигатель постоянного тока вращается, потому что постоянный магнит на роторе пытается выровняться в направлении магнитного поля, создаваемого электромагнитами статора. При этом крутящий момент максимален, когда оба магнитных поля перпендикулярны друг другу. Тип управления различают двояко: по форме питания обмоток (блочное или синусоидальное) или по способам определения положения ротора. Необходимо определить положение ротора, так как токи в обмотках должны быть синхронизированы для переключения таким образом, чтобы магнитное поле статора всегда было перпендикулярно магнитному полю ротора, т.е. он продолжал вращаться с заданной скоростью.
При этом крутящий момент максимален, когда оба магнитных поля перпендикулярны друг другу. Тип управления различают двояко: по форме питания обмоток (блочное или синусоидальное) или по способам определения положения ротора. Необходимо определить положение ротора, так как токи в обмотках должны быть синхронизированы для переключения таким образом, чтобы магнитное поле статора всегда было перпендикулярно магнитному полю ротора, т.е. он продолжал вращаться с заданной скоростью.
2.1 Коммутация блока
Положение ротора можно легко определить с помощью датчиков Холла в двигателе. Затем они могут переключаться соответствующим образом совмещенным магнитом на роторе в точное время, когда обмотка должна быть переключена. Тогда три обмотки соответствуют трем датчикам Холла; их состояния определяют, как должны быть соединены обмотки. Если три обмотки переключаются цифровым способом, т. е. на обмотках нет тока или полный ток, это называется блочной коммутацией. Эта комбинация датчиков Холла и блочной коммутации является технически самым простым методом приведения в действие бесконтактного двигателя постоянного тока. Недостатком этого метода является то, что магнитное поле статора из-за дискретного переключения не всегда перпендикулярно магнитному полю ротора. Это связано с тем, что выравнивание магнитного поля статора остается постоянным через 60°, тогда как ротор вращается дальше до следующей точки переключения. Датчики Холла расположены таким образом, что магнитное поле статора в середине находится перпендикулярно между двумя точками переключения, что приводит к соответствующей угловой погрешности в 30° в точках переключения. В результате крутящий момент на 13,4% (1-косинус [30°]) ниже. Следовательно, при блочной коммутации на этом пике возникает пульсация крутящего момента с частотой, в шесть раз превышающей электрическую частоту вращения двигателя. Это приводит к вибрациям и шумам; особенно на низких оборотах двигатель будет вращаться неравномерно. Вот почему блочная коммутация не подходит для применений, в которых двигатели должны, по крайней мере, с перерывами, работать медленно (менее прибл.
Недостатком этого метода является то, что магнитное поле статора из-за дискретного переключения не всегда перпендикулярно магнитному полю ротора. Это связано с тем, что выравнивание магнитного поля статора остается постоянным через 60°, тогда как ротор вращается дальше до следующей точки переключения. Датчики Холла расположены таким образом, что магнитное поле статора в середине находится перпендикулярно между двумя точками переключения, что приводит к соответствующей угловой погрешности в 30° в точках переключения. В результате крутящий момент на 13,4% (1-косинус [30°]) ниже. Следовательно, при блочной коммутации на этом пике возникает пульсация крутящего момента с частотой, в шесть раз превышающей электрическую частоту вращения двигателя. Это приводит к вибрациям и шумам; особенно на низких оборотах двигатель будет вращаться неравномерно. Вот почему блочная коммутация не подходит для применений, в которых двигатели должны, по крайней мере, с перерывами, работать медленно (менее прибл. 10 % от номинальной скорости). В среднем пульсация крутящего момента вызывает потерю ок. 4,5% крутящего момента, а также соответствующее ухудшение КПД по сравнению с термически эквивалентным, оптимальным питанием обмоток.
10 % от номинальной скорости). В среднем пульсация крутящего момента вызывает потерю ок. 4,5% крутящего момента, а также соответствующее ухудшение КПД по сравнению с термически эквивалентным, оптимальным питанием обмоток.
2.2 Синусоидальная коммутация
Оптимальной формой питания является синусоидальная коммутация, при которой каждая обмотка двигателя питается синусоидальной волной, сдвинутой на 120°, что приводит к постоянно вращающемуся магнитному полю статора с постоянной напряженностью. Как правило, если для определения положения ротора доступны только датчики Холла, можно также использовать синусоидальную коммутацию путем интерполяции между точками переключения. В большинстве случаев это напрямую приводит к значительному улучшению характеристик мотора. Однако в случае изменения нагрузки между двумя датчиками Холла синусоида не может быть отрегулирована, что приводит к неправильному позиционированию магнитного поля. Это можно исправить только с помощью следующего сигнала датчика Холла.
Таким образом, для синусоидальной коммутации в идеале требуется система с более высоким разрешением для определения положения ротора. Обычно он состоит из оптического или магнитного энкодера, который постоянно определяет положение ротора с достаточной точностью и соответствующим образом регулирует ток.
2.3 Поле-ориентированное управление
Иногда поле-ориентированное управление все еще отличается от синусоидальной коммутации; однако часто оба термина используются взаимозаменяемо. Эти термины используются взаимозаменяемо, поскольку синусоидальная коммутация, как описано выше, оптимально управляет магнитным полем статора.
Если не учитывать принцип работы самого регулятора тока, разница в описании синусоидальной коммутации не очевидна. Ранее предполагалось, что будет генерироваться синусоидальное значение тока, которое с достаточной скоростью будет вводиться в обмотку регулятором тока. Таким образом, обе задачи, значение тока (которое соответствует контуру управления крутящим моментом) и управление током обмоток, обрабатываются отдельно при синусоидальной коммутации или, соответственно, выполняются отдельными контроллерами. Однако в этом случае регуляторы тока для обмоток получают с увеличением скорости значение тока, которое изменяется с большей частотой. В то же время необходимо компенсировать все более сильное влияние противо-ЭДС двигателя. Поскольку полоса пропускания регулятора тока имеет верхний предел, при более высоких скоростях возможны фазовые сдвиги и искажения токов, так что магнитное поле статора больше не перпендикулярно ротору.
Однако в этом случае регуляторы тока для обмоток получают с увеличением скорости значение тока, которое изменяется с большей частотой. В то же время необходимо компенсировать все более сильное влияние противо-ЭДС двигателя. Поскольку полоса пропускания регулятора тока имеет верхний предел, при более высоких скоростях возможны фазовые сдвиги и искажения токов, так что магнитное поле статора больше не перпендикулярно ротору.
Полеориентированное управление решает эту проблему, управляя вектором тока непосредственно во вращающейся системе координат ротора. Для этого измеренные токи трех фаз преобразуются посредством преобразования Кларка-Парка в двухосную систему координат ротора. Таким образом, значение крутящего момента больше не будет сначала преобразовываться в значения тока, как в случае с синусоидальной коммутацией для отдельных обмоток, каждая из которых затем управляется отдельно; но вместо этого одновременно контролируется в системе координат уровень тока ротора и ориентация магнитного поля. Затем рассчитываются токи для отдельных обмоток (через обратное преобразование Кларка-Парка). При этом методе управление не зависит от частоты и даже при более высоких скоростях вращения всегда будет обеспечивать оптимальный синусоидальный ток.
Затем рассчитываются токи для отдельных обмоток (через обратное преобразование Кларка-Парка). При этом методе управление не зависит от частоты и даже при более высоких скоростях вращения всегда будет обеспечивать оптимальный синусоидальный ток.
2.4 Бездатчиковое управление
Бездатчиковое управление – это не дополнительный метод управления, а скорее термин для методов, позволяющих определять положение ротора без датчиков (например, датчиков Холла, энкодеров). Эти методы можно условно разделить на два класса:
Простое бездатчиковое управление основано на прямом измерении противо-ЭДС в соответствующей обмотке, не находящейся под напряжением. Однако по сравнению со стандартным контролем этот метод требует специального оборудования и нестабилен ниже прибл. 20 % от номинальной скорости двигателя, так как сигнал измерения слишком мал. Кроме того, этот метод работает только в сочетании с блочной коммутацией, потому что при синусоидальной коммутации все три катушки всегда находятся под напряжением одновременно.
Более сложные решения основаны на так называемом «отслеживании наблюдателя», которое воспроизводит значения, не поддающиеся непосредственному измерению, такие как скорость или противо-ЭДС, из других значений, измеренных контроллером тока. Ядром системы этого типа является чрезвычайно точная модель двигателя, которая параллельно с реальным двигателем вычисляет из известных входных значений, таких как установленный ШИМ, те значения, которые также измеряются, такие как текущий уровень в обмотка. Затем рассчитанные значения сравниваются с измеренными значениями в каждом цикле. Из-за ошибки наблюдения, определяемой этим методом, внутренние значения модели двигателя постоянно корректируются. С помощью этого метода также получают более точную оценку значений, которые фактически не измеряются, например скорости. Хотя этот метод работает только потому, что реакция обмотки изменяется в зависимости от скорости из-за индуцированного напряжения, непосредственно измеренные значения могут быть легко измерены даже при низких скоростях. В результате получается «виртуальный энкодер», который выдает информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и реальный оптический или магнитный энкодер. Как и в этом методе, противо-ЭДС не обязательно измерять напрямую, его также можно комбинировать с синусоидальной коммутацией или управлением, ориентированным на поле.
В результате получается «виртуальный энкодер», который выдает информацию о положении и скорости, начиная с определенной минимальной скорости, с той же точностью, что и реальный оптический или магнитный энкодер. Как и в этом методе, противо-ЭДС не обязательно измерять напрямую, его также можно комбинировать с синусоидальной коммутацией или управлением, ориентированным на поле.
Общим для обоих бессенсорных методов является то, что информация о положении ротора недоступна на холостом ходу, поэтому требуется специальный метод запуска. Подобно шаговому двигателю, двигатель работает в управляемом режиме в течение нескольких коммутационных циклов, пока не наберет требуемую скорость и бездатчиковое измерение не позволит определить положение ротора.
3. Важные параметры
| Скорость холостого хода | Макс.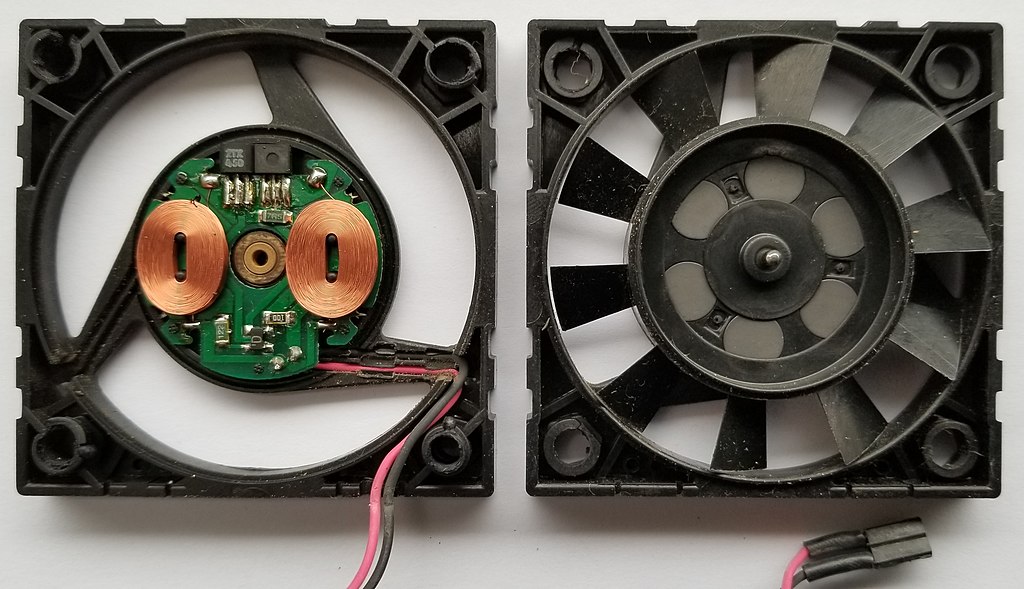 скорость вращения ненагруженного двигателя, определяемая, прежде всего, константой напряжения скорость вращения ненагруженного двигателя, определяемая, прежде всего, константой напряжения |
|---|---|
| Ток холостого хода | Ток на холостом ходу (потребление, необходимое для преодоления трения) |
| Номинальная скорость/номинальный крутящий момент | Номинальная рабочая точка |
| Максимальный крутящий момент | Моментально достижимый крутящий момент, обычно 3-кратный номинальный крутящий момент в течение прибл. Похожие записи
Об автореalexxlab |
