Датчик наклона амперка: Датчик наклона (Troyka-модуль) / Купить в Москве и СПБ с доставкой по России / Амперка
Содержание
Датчик наклона arduino в категории «Телекоммуникации и связь»
Датчик вибрации, наклона SW-520D для Arduino
На складе в г. Ровно
Доставка по Украине
по 10 грн
от 2 продавцов
10 грн
Купить
Датчик наклона, вибрации SW-420, Arduino [#3-6]
На складе в г. Запорожье
Доставка по Украине
21 грн
Купить
Запорожье
Датчик нахилу вібрації для Arduino
Доставка по Украине
69.30 грн
Купить
Датчик вибрации, наклона SW-420, Arduino
На складе
Доставка по Украине
34.06 грн
Купить
Датчик вибрации, наклона SW-520D для Arduino
Доставка по Украине
10 грн
12 грн
Купить
KY-027 модуль ртутного датчика наклона ARDUINO, АКСЕССУАРЫ ДЛЯ ARDUINO
Заканчивается
Доставка по Украине
55 грн
Купить
Amperka Датчик наклона
На складе
Доставка по Украине
180 грн
Купить
Датчик удару, вібрації
Доставка по Украине
211. 80 грн
80 грн
Купить
Модуль вибродатчика SW-18010P
На складе
Доставка по Украине
24.60 грн
Купить
Модуль датчика удара, наклона SW-420
На складе
Доставка по Украине
21.20 грн
Купить
Модуль на датчике вибрации SW-420
На складе в г. Одесса
Доставка по Украине
25 грн
Купить
Одесса
Датчик вибрации SW-18020P
На складе в г. Одесса
Доставка по Украине
10 грн
Купить
Одесса
Датчик вибрации SW-420
На складе в г. Одесса
Доставка по Украине
10 грн
Купить
Одесса
Модуль на датчике вибрации SW-420
На складе в г. Одесса
Доставка по Украине
25 грн
Купить
Одесса
Датчик вибрации SW-420
На складе в г.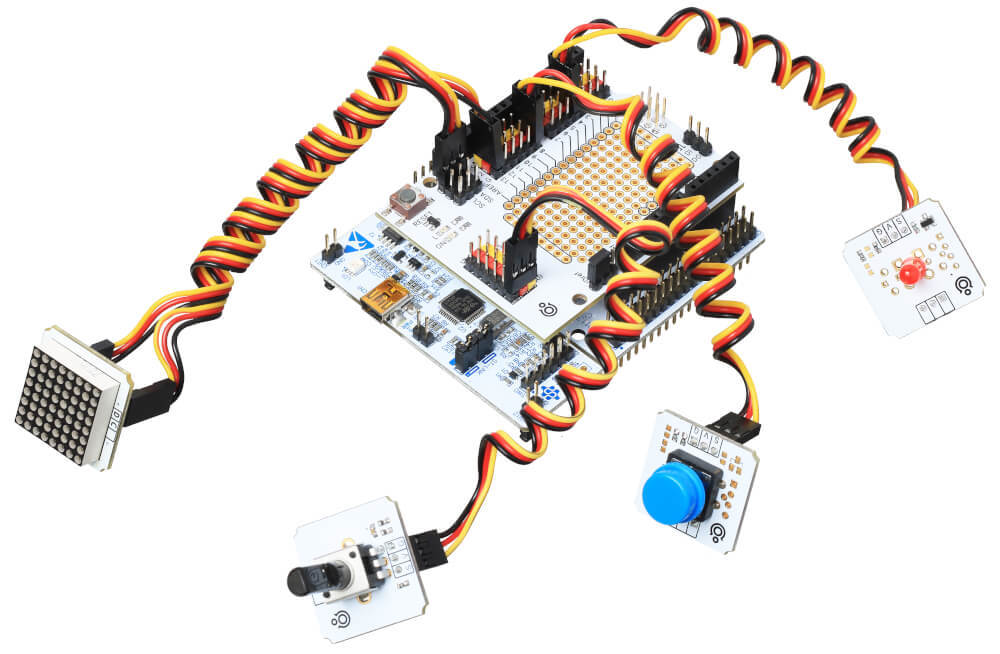 Одесса
Одесса
Доставка по Украине
10 грн
Купить
Одесса
Смотрите также
SW520D датчик
Доставка из г. Львов
3.70 грн
Купить
Датчик вибрации SW-18020P
Доставка из г. Одесса
10 грн
Купить
Одесса
Датчик вибрации, наклона SW-520D для Arduino
На складе
Доставка по Украине
53 грн
Купить
KY-020 датчик наклона ARDUINO, АКСЕССУАРЫ ДЛЯ ARDUINO
Недоступен
44 грн
Смотреть
Датчик наклона, вибрации SW-420, модуль Arduino
Недоступен
79.35 грн
Смотреть
Датчик наклона для Arduino KY-027 Magic Light Cup Sensor
Недоступен
22 грн
Смотреть
Датчик вибрации, наклона SW-520D для Arduino
Недоступен
10 грн
Смотреть
Датчик вибрации, наклона SW-520D для Arduino
Недоступен
10 грн
Смотреть
Датчик вибрации, наклона SW-520D для Arduino
Недоступен
59 грн
Смотреть
Датчик вибрации, наклона SW-520D для Arduino
Недоступен
10 грн
Смотреть
Датчик вибрации, наклона SW-520D для Arduino
Недоступен
10 грн
Смотреть
Датчик SW-520D вибрации, наклона для Arduino
Недоступен
72 грн
Смотреть
Датчик вибрации, наклона SW-520D для Arduino
Недоступен
10 грн
Смотреть
Датчик вибрации, наклона SW-520D для Arduino
Недоступен
10 грн
Смотреть
Образовательный набор Амперка для обучения электронике и робототехнике
В этом обзоре поговорим об образовательном наборе «Амперка», выпускаемом московским ООО «Амперка», и представляющем собой готовый обучающий курс, цель которого — обучить новичков прикладному программированию микроконтроллеров, и дать ученику возможность реализовать свой творческий потенциал, создавая собственные электронные устройства.
Набор позволит новичку научиться применять на практике законы электричества, а также освоить практическое применение теоретического материала информатики. Набор идеален как для школ, так и для самостоятельного освоения Arduino.
Набор «Ампрека» включает в себя три составные части:
Электроника;
Учебный курс;
Онлайн материалы.
Электроника
Набор содержит все необходимые электронные компоненты, более 150 деталей, которые пригодятся для успешного прохождения курса. В него входят резисторы, светодиоды, транзисторы, моторы, сенсоры, LCD-экран, плата с программируемым микроконтроллером Arduino, — в наборе более 20 наименований. Все компоненты поставляются в практичной пластиковой коробке, разделенной на секции.
В набор включены именно те компоненты, которые необходимы для мини-лаборатории, они тщательно подобраны и представлены в оптимальном количестве. По входящему в комплект учебному пособию, новичок сможет проводить собственные электронные эксперименты и выполнять дополнительные задания.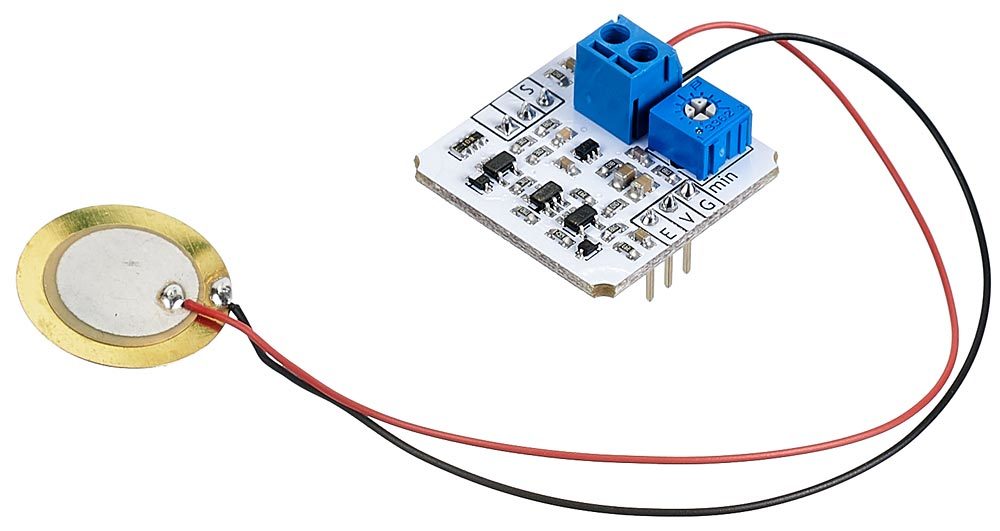
В различных уроках курса одни и те же компоненты будут использоваться по-разному, в различных комбинациях, работая и взаимодействуя в создаваемом устройстве определенным образом, позволяя ученику глубже понять то, как они функционируют, каков принцип их действия.
Мозгом набора является плата на Arduino, и каждый урок подразумевает ее программирование. Программирование контроллера осуществляется с любого компьютера, на любой операционной системе, будь то MacOS, Windows или Linux. Все остальные принадлежности так же включены в комплект.
Безопасность обучения достигается применением питания для всех устройств напряжением не выше 9 вольт. А крепкая упаковка не позволит ученику повредить ее. Компоненты набора поставлены в избыточном количестве, поэтому если ученик потеряет что-то, это не страшно, всегда есть запасной компонент в коробке.
Набор содержит следующие электронные компоненты:
Плата с микроконтроллером Arduino Uno;
Два датчика линии;
Один датчик наклона;
Два фоторезистора;
Два термистора;
Четыре тактовые кнопки;
Два потенциометра;
Одну макетную плату;
75 соединительных проводов;
Один USB-кабель;
Один разъем для батарейки «Крона»;
Одно двухколесное шасси для робота;
Один сервопривод с креплениями;
Текстовый LCD-экран;
Два семисегментных индикатора;
12 красных, 4 зеленых, 4 желтых, 2 трехцветных светодиода;
Два звуковых пьезоизлучателя;
Набор резисторов;
10 биполярных транзисторов, 4 полевых транзистора;
Две микросхемы CD4026;
5 выпрямительных диодов;
Цифровой мультиметр с щупами;
Драйвер моторов Motor Shield;
Расширитель портов Troyka Shield;
Соединительные элементы.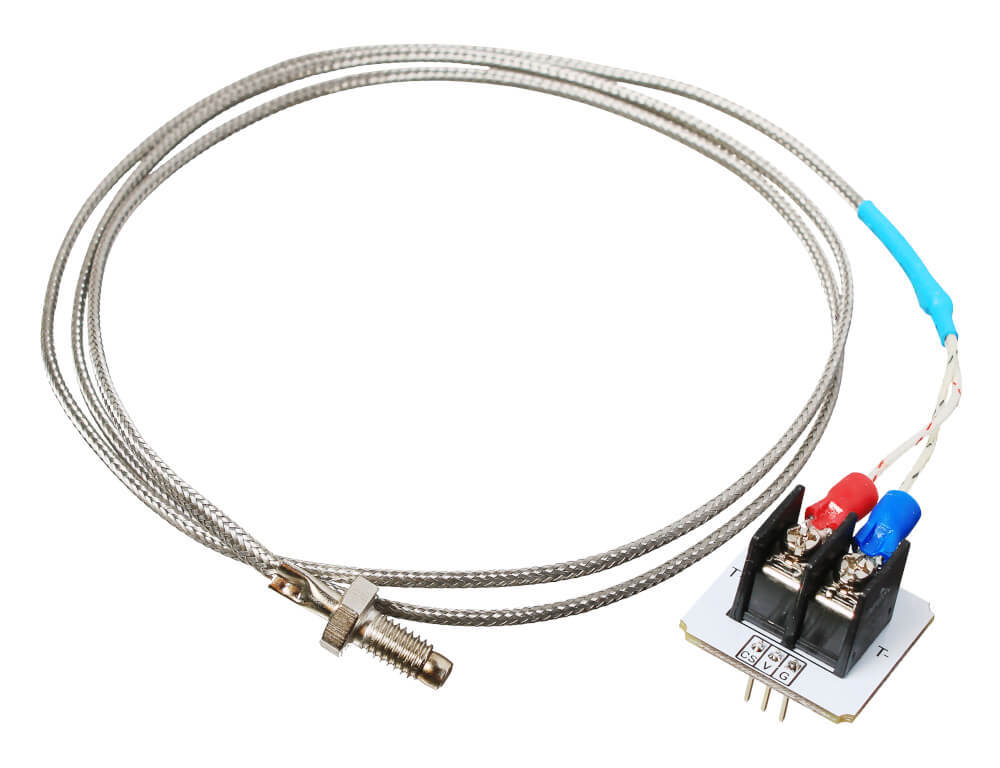
Учебный курс
В комплект включен учебник, написанный специально для прохождения курса с набором «Амперка». Каждый урок предполагает использование электроники. Учебник на 207 страниц в твердом переплете содержит 17 параграфов. Каждый параграф — один урок. Курс рассчитан на одно занятие каждую неделю на протяжении полугода.
Педагоги и сами ученики легко освоят предмет при помощи данного пособия, ведь изложение учебного материала ведется от простого к сложному. Первые параграфы посвящены микроконтроллеру и азам программирования, а также основным законам электричества. Следующим шагом — создание собственных устройств, важные аспекты разработки.
По завершении курса ученик сможет создать собственного автономного мобильного робота. Как вы уже поняли, каждый урок содержит практическую часть, каждое занятие предполагает обучение сборке одного или нескольких новых устройств с использованием компонентов, обязательно присутствующих в наборе.
Онлайн материалы
На сайте компании Амперка ученики всегда смогут найти любые материалы, которые помогут им в освоении курса. Материалы представлены в форме учебных статей, а также в форме видео уроков. На сайте имеется и форум, где ученики могут обсуждать проекты, и находить решения.
Материалы представлены в форме учебных статей, а также в форме видео уроков. На сайте имеется и форум, где ученики могут обсуждать проекты, и находить решения.
Представители компании «Амперка» в случае обращения ученика или педагога могут ответить на возникшие вопросы и оказать квалифицированную помощь. Кроме того на сайте есть тематический блог, где можно в любое время почитать и посмотреть много интересного относительно программирования и конструирования.
Как проходит обучение
Курс связан в первую очередь с популярной сегодня платформой Arduino, которая благодаря своей простоте и удобству работы позволяет многим людям реализовывать их творческий потенциал.
С Arduino не нужно залезать в очень сложные физические процессы и в программирование контроллеров в чистом виде, ведь более глубокие знания человек, если захочет, приобретет в институте.
По ходу данного курса человек научится комбинировать разнообразные компоненты с Arduino, загружать в нее программы, и создавать устройства, список которых ограничен лишь фантазией разработчика, то есть ученика. Именно такой принцип лежит в основе курса «Амперка».
Именно такой принцип лежит в основе курса «Амперка».
Сначала ребенок знакомится с микроконтроллером и платой Arduino, он учится с помощью компьютера загружать программу в контроллер, чтобы получить то или иное поведение устройства. Происходит освоение того, как пишется и как компилируется исходный код.
После этого к Arduino подключаются в различных комбинациях электронные компоненты, отвечающие за звук, свет, механические движения, подключаются сенсоры, показывается, как происходит взаимодействие компонентов между собой и с окружающей средой.
В итоге создается автономный мобильный робот, представляющий собой полноценное устройство, в котором реализованы все знания, усвоенные учеником в ходе обучения. Каждый урок начинаясь с теоретической части перетекает в практическую часть, где приобретенный навык нужно реализовать на практике, закрепив полученное знание материала.
Этим знанием может быть очередной шаг в программировании или в понимании функционирования физических устройств и компонентов. Так или иначе, каждый урок связан со сборкой своими руками нового устройства на базе Arduino.
Так или иначе, каждый урок связан со сборкой своими руками нового устройства на базе Arduino.
Ученику не придется разводить и паять печатные платы, ведь в комплекте есть макетная плата и макетные соединительные провода. Можно собирать электрические цепи без необходимости пайки. Нужный компонент просто вставляется в отверстие на макетной плате, фиксируется, а соединение блоков между собой осуществляется при помощи макетных проводов.
Так, обладая сначала только поверхностными представлениями о физических процессах, и имея слабое представление о применимости информатики, ученик овладеет по итогам курса навыком программирования на C++, начиная от переменных, заканчивая основами объектно-ориентированного программирования. Он научится работать с Arduino, писать программы, делать прошивку контроллера.
Проектирование электронных схем, воплощение их в реальность, применение законов электричества — все это станет итогом занятий с набором «Амперка». Ученик сможет собирать, проверять, исправлять, модифицировать свои устройства, ведь на макетной плате все это очень просто делается.
Управление электроникой будет осуществляться из программы, записанной в контроллер Arduino, и это всегда практика на каждом уроке, которая станет замечательной базой для поступления в технический ВУЗ.
Смотрите также у нас на сайте: Устройство и программирование микроконтроллеров для начинающих
Андрей Повный
Источник: http://electrik.info
SW-520D Датчик наклона: распиновка, характеристики, схема и техническое описание
27 марта 2018 — 0 комментариев
МОДУЛЬ ДАТЧИКА НАКЛОНА — это устройство, используемое для определения плоскостного движения. Хотя они доступны в различных типах, их основная функция остается неизменной. Их функция состоит в том, чтобы обнаруживать сдвиг плоскости от горизонтального к вертикальному и посылать сигнал, когда это происходит. Существуют модули, которые могут обнаруживать даже небольшие сдвиги плоскости, но здесь мы собираемся обсудить простой контактный модуль TILT SENSOR. Здесь мы будем использовать SW-520D МОДУЛЬ ДАТЧИКА НАКЛОНА .
Существуют модули, которые могут обнаруживать даже небольшие сдвиги плоскости, но здесь мы собираемся обсудить простой контактный модуль TILT SENSOR. Здесь мы будем использовать SW-520D МОДУЛЬ ДАТЧИКА НАКЛОНА .
МОДУЛЬ ДАТЧИКА НАКЛОНА Конфигурация контактов
МОДУЛЬ ДАТЧИКА НАКЛОНА представляет собой трехконтактное устройство, как показано на рисунке. Все три контакта являются обязательными для использования модуля.
Название контакта | Описание |
ЗЕМЛЯ | Подключен к ЗЕМЛЕ |
ВКК | Подключен к +5В |
ДО | Выход датчика наклона |
МОДУЛЬ ДАТЧИКА НАКЛОНА Характеристики и характеристики
- Напряжение питания: от 3,3 В до 5 В
- Выход может быть напрямую подключен к контроллеру
- Выход уровня TTL
- Максимальный выходной ток: 15 мА
- Может работать при низком напряжении
- Максимальная рабочая температура: от 0°C до +80°C
- Простой интерфейс
- Долгая жизнь.


Примечание: Полную техническую информацию можно найти в листе технических данных датчика наклона SW-520D , ссылка на который находится внизу этой страницы.
Где используются МОДУЛИ ДАТЧИКА НАКЛОНА?
Вот несколько случаев, когда выбирают SW-520D СЕНСОРНЫЙ МОДУЛЬ :
Случай 1: SW-520D используется, когда стоимость системы не может быть высокой. SW-520D — один из самых дешевых и надежных ДАТЧИКОВ НАКЛОНА на рынке. Его легко заменить в случае неисправности.
Вариант 2: SW-520D легко устанавливается в систему. Все, что вам нужно сделать, это правильно включить модуль и правильно получить выходной сигнал.
Вариант 3: Благодаря очень длительному сроку службы этот модуль можно использовать на постоянной основе.
Также модуль не требует дополнительных компонентов для установки в систему.
Как использовать МОДУЛЬ ДАТЧИКА НАКЛОНА SW-520D
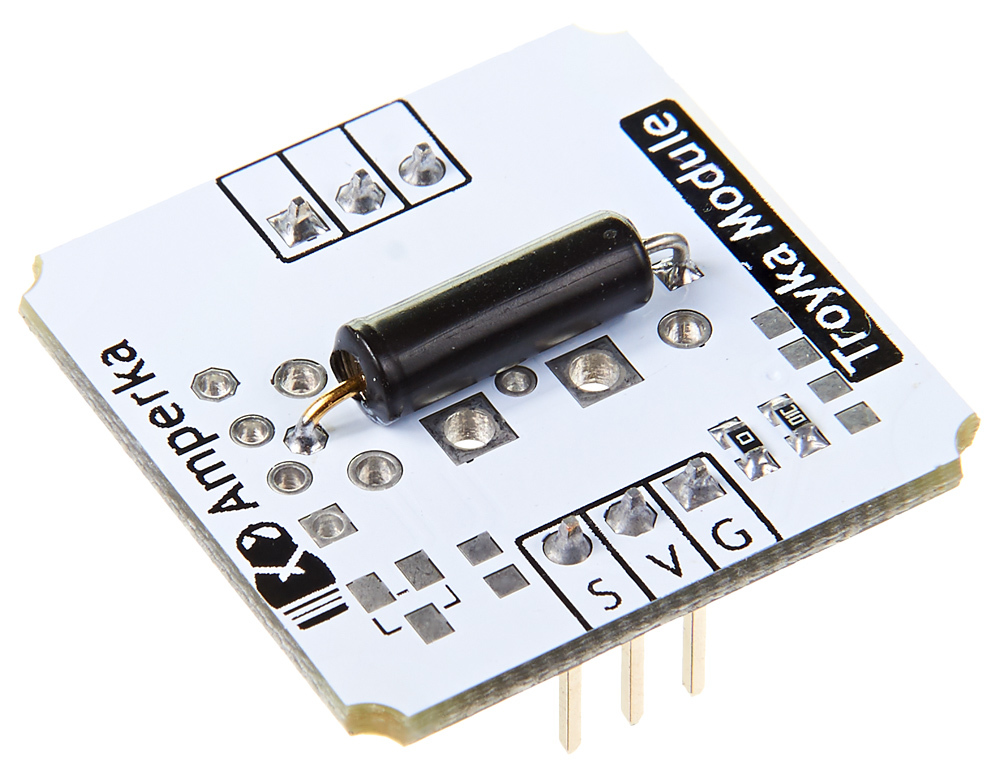
Прежде чем понять, как использовать модуль, давайте сначала разберемся с работой переключателя наклона SW-520D. Для этого рассмотрим внутреннюю работу этого переключателя наклона.
Как показано на рисунке, внутри датчика наклона SW-520D все, что у нас есть, это две металлические бусины. А выходные клеммы проецируются внутрь. Когда переключатель наклона расположен горизонтально на плоскости, два металлических шарика опираются на пол, как показано на рисунке. В этой ситуации не будет контакта между клеммами T1 и T2. Таким образом, T1 и T2 будут открыты.
Теперь, когда датчик наклона изменил положение с горизонтального на вертикальное, мы имеем что-то вроде этого.
Когда переключатель наклона перемещается вертикально под действием силы тяжести, металлические шарики останавливаются на выступающих клеммах. Поскольку шар металлический, когда они опираются на клеммы, между двумя клеммами образуется электрический контакт. Таким образом, в этом положении Т1 и Т2 замкнуты накоротко.
Таким образом, в этом положении Т1 и Т2 замкнуты накоротко.
Когда переключатель наклона снова перемещается в горизонтальное положение, шарик покидает контакт и остается на полу, как и раньше. При этом контакты Т1 и Т2 размыкаются, что приводит к размыканию цепи.
So SW-520D выходные клеммы разомкнуты, когда корпус находится в горизонтальном положении, и короткозамкнуты, когда корпус находится в вертикальном положении. Следовательно, используя этот переключатель наклона, мы можем определить, в какой плоскости лежит тело.
Этот контакт переключателя наклона будет издавать помехи и не может быть напрямую подключен к контроллерам. Итак, мы подключим этот переключатель наклона к простой схеме компаратора операционного усилителя , чтобы сделать сенсорный модуль.
Упрощенный модуль датчика наклона показан на рисунке. В обычных ситуациях T1 и T2 будут разомкнуты, и через них появится весь VCC. Таким образом, напряжение на положительном выводе компаратора будет равно нулю. Таким образом, выход компаратора будет низким. В это время светодиод будет выключен.
Таким образом, напряжение на положительном выводе компаратора будет равно нулю. Таким образом, выход компаратора будет низким. В это время светодиод будет выключен.
При вертикальном перемещении датчика наклона T1 и T2 замыкаются. В это время весь VCC появляется через R3. В это время напряжение на положительной клемме компаратора будет равно VCC. При HIGH на положительной клемме выход компаратора будет HIGH. В это время светодиод будет включен.
Выход этого модуля может быть передан контроллеру или другим системам для надлежащего использования.
Приложения
- Системы безопасности.
- Цифровые камеры
- Игрушки
- Двигатели
- Роботизированные руки
- Торговые автоматы.
- Измерительные инструменты.
- Хобби-проекты.
2D-модель и размеры
Все размеры даны в миллиметрах.
Метки
Датчик наклона
Датчики
Анализ влияния наклона на профилирование глубины выреза с использованием тонкокожного режима вихретокового датчика
1. Ян Г., Диб Г., Удпа Л., Тамбуррино А., Удпа С.С. Вращающееся поле EC-GMR датчик обнаружения трещин в местах крепления в многослойных конструкциях. IEEE Sens. J. 2014; 15: 463–470. doi: 10.1109/JSEN.2014.2341653. [CrossRef] [Google Scholar]
Ян Г., Диб Г., Удпа Л., Тамбуррино А., Удпа С.С. Вращающееся поле EC-GMR датчик обнаружения трещин в местах крепления в многослойных конструкциях. IEEE Sens. J. 2014; 15: 463–470. doi: 10.1109/JSEN.2014.2341653. [CrossRef] [Google Scholar]
2. Васич Д., Билас В., Амбрус Д. Импульсный вихретоковый неразрушающий контроль ферромагнитных труб. IEEE транс. Инструм. Изм. 2004;53:1289–1294. doi: 10.1109/TIM.2004.830594. [CrossRef] [Google Scholar]
3. Li W., Chen G., Ge J., Yin X., Li K. Высокочувствительные измерения поля вращающегося переменного тока для подводных трещин под произвольным углом. НК E Междунар. 2016;79:123–131. doi: 10.1016/j.ndteint.2016.01.003. [CrossRef] [Google Scholar]
4. Егоров А.В., Поляков В.В., Салита Д.С., Колубаев Е.А., Псахье С.Г., Чернявский А.Г., Воробей И.В. Контроль алюминиевых сплавов многочастотным вихретоковым методом. Защ. Технол. 2015;11:99–103. doi: 10.1016/j.dt.2014.12.002. [CrossRef] [Google Scholar]
5. Лу М., Пейтон А. , Инь В. Ускорение качания частоты в вихретоковых вычислениях. IEEE транс. Магн. 2017;53:7402808. doi: 10.1109/TMAG.2017.2688326. [CrossRef] [Google Scholar]
, Инь В. Ускорение качания частоты в вихретоковых вычислениях. IEEE транс. Магн. 2017;53:7402808. doi: 10.1109/TMAG.2017.2688326. [CrossRef] [Google Scholar]
6. Боулер Дж.Р., Нортон С.Дж., Харрисон Д.Дж. Вихретоковое взаимодействие с идеальной трещиной. II. Обратная задача. Дж. Заявл. физ. 1994; 75:8138–8144. doi: 10.1063/1.356512. [CrossRef] [Google Scholar]
7. Лу М., Сюй Х., Чжу В., Инь Л., Чжао К., Пейтон А., Инь В. Инвариантность отрыва проводимости и измерение проницаемости для металлических ферритов. тарелки. НК E Междунар. 2018;95:36–44. doi: 10.1016/j.ndteint.2018.01.007. [CrossRef] [Google Scholar]
8. Lu M., Meng X., Huang R., Chen L., Peyton A., Yin W. Функция высокочастотной фазы для измерения магнитной проницаемости с помощью вихретокового датчика. . НК E Междунар. 2021;123:102519. doi: 10.1016/j.ndteint.2021.102519. [CrossRef] [Google Scholar]
9. Авила Дж. Р. С., Лу М., Хуан Р., Чен З., Чжу С., Инь В. Точные измерения толщины листа с переменным отрывом с использованием комбинированного индуктивного и емкостного датчика. . НК E Междунар. 2020;110:102202. doi: 10.1016/j.ndteint.2019.102202. [CrossRef] [Google Scholar]
. НК E Междунар. 2020;110:102202. doi: 10.1016/j.ndteint.2019.102202. [CrossRef] [Google Scholar]
10. Lu M., Meng X., Yin W., Qu Z., Wu F., Tang J., Xu H., Huang R., Chen Z., Zhao Q. , и другие. Измерение толщины пластин из немагнитной стали с использованием нового планарного датчика с тремя катушками. НК E Междунар. 2019;107:102148. doi: 10.1016/j.ndteint.2019.102148. [CrossRef] [Google Scholar]
11. Хуан Р., Лу М., Пейтон А., Инь В. Измерение толщины металлических пластин с конечным плоским размером с помощью вихретокового метода. IEEE транс. Инструм. Изм. 2020;69: 8424–8431. [Google Scholar]
12. Лу М., Мэн С., Чен Л., Хуан Р., Инь В., Пейтон А. Измерение проницаемости ферромагнитных пластин с помощью нового планарного датчика с тремя катушками. IEEE Sens. J. 2019;20:2904–2910. doi: 10.1109/JSEN.2019.2957212. [CrossRef] [Google Scholar]
13. Лу М., Чжу В., Инь Л., Пейтон А., Инь В., Цюй З. Уменьшение эффекта отрыва при измерении проницаемости магнитных пластин по данным многочастотной индукции .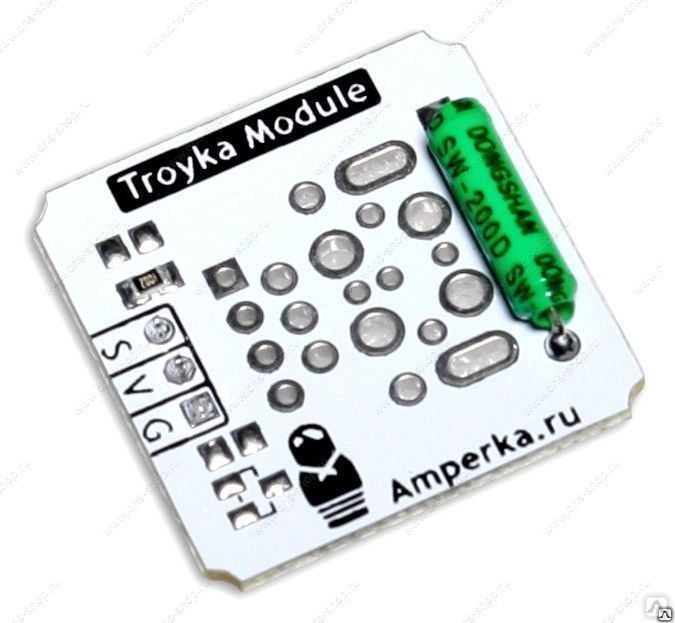 IEEE транс. Инструм. Изм. 2017; 67: 167–174. дои: 10.1109/ТИМ.2017.2728338. [CrossRef] [Google Scholar]
IEEE транс. Инструм. Изм. 2017; 67: 167–174. дои: 10.1109/ТИМ.2017.2728338. [CrossRef] [Google Scholar]
14. Gallion J.R., Zoughi R. Миллиметровая визуализация поверхностных трещин в стали с сильной поверхностной коррозией. IEEE транс. Инструм. Изм. 2017;66:2789–2791. doi: 10.1109/TIM.2017.2735658. [CrossRef] [Google Scholar]
15. Тянь Г.Ю., Софиан А. Классификация дефектов с использованием новой функции импульсных вихретоковых датчиков. НК E Междунар. 2005; 38:77–82. doi: 10.1016/j.ndteint.2004.06.001. [CrossRef] [Google Scholar]
16. Лулофф М.С., Морелли Дж., Краузе Т.В. февраль. Исследование решений Додда и Дидса для приемо-передающего вихретокового преобразователя над слоистой планарной структурой. АИП конф. проц. 2017;1806:110004. [Академия Google]
17. Лу М., Хуанг Р., Инь В., Чжао К., Пейтон А. Измерение проницаемости пластин из черных металлов с использованием нового метода компенсации отрыва по фазовой характеристике. IEEE Sens. J. 2019;19:7440–7446.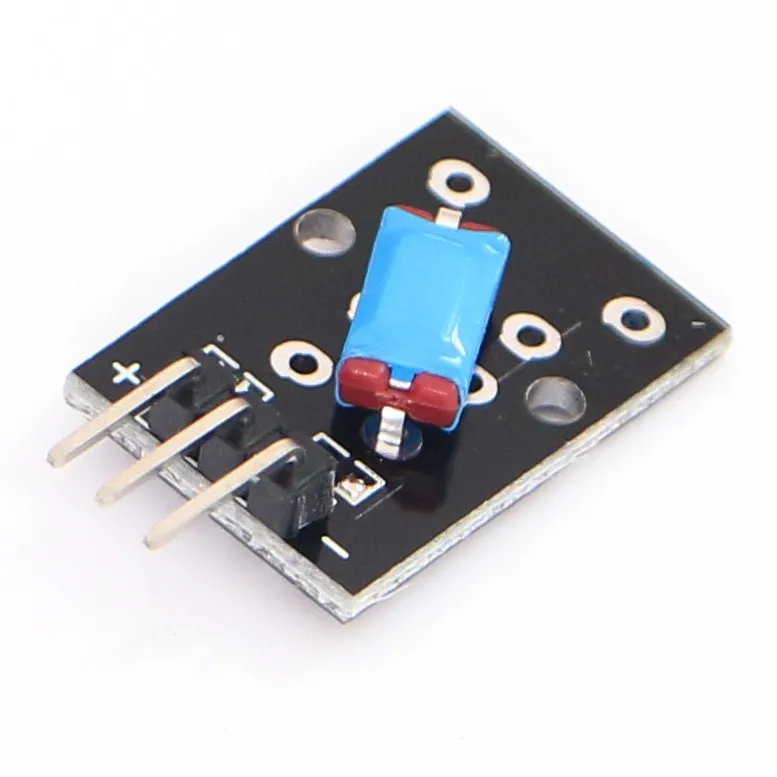 doi: 10.1109/JSEN.2019.2916431. [CrossRef] [Google Scholar]
doi: 10.1109/JSEN.2019.2916431. [CrossRef] [Google Scholar]
18. Бетта Г., Ферриньо Л., Ларакка М. Прибор ЭХТ на основе ГМР для обнаружения и определения характеристик трещины на плоском образце: портативное решение. IEEE транс. Инструм. Изм. 2011;61:505–512. doi: 10.1109/TIM.2011.2161923. [CrossRef] [Google Scholar]
19. Хуан Р., Лу М., Пейтон А., Инь В. Новый метод, основанный на инверсии возмущенной матрицы, для ускорения анализа методом конечных элементов в вихретоковом неразрушающем контроле со сканированием трещин. IEEE-доступ. 2020;8:12438–12444. doi: 10.1109/ACCESS.2020.2966032. [CrossRef] [Google Scholar]
20. Кэннон Д.Ф., Эдель К.О., Грасси С.Л., Соули К. Дефекты рельсов: обзор. Фракция усталости. англ. Матер. Структура 2003; 26: 865–886. doi: 10.1046/j.1460-2695.2003.00693.x. [Перекрестная ссылка] [Академия Google]
21. Николсон Г.Л., Дэвис К.Л. Моделирование реакции датчика ACFM на трещины RCF рельсов и колес. НК E Междунар. 2012;46:107–114. doi: 10.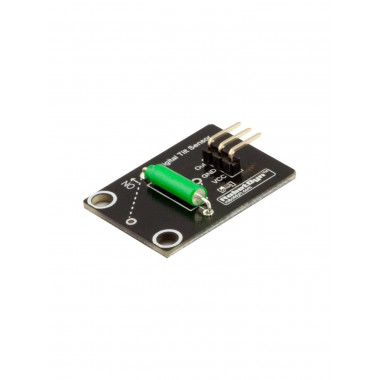 1016/j.ndteint.2011.11.010. [CrossRef] [Google Scholar]
1016/j.ndteint.2011.11.010. [CrossRef] [Google Scholar]
22. Биро О. Формулировки вихревых токов на краевых элементах. вычисл. Методы Прил. мех. англ. 1999; 169: 391–405. doi: 10.1016/S0045-7825(98)00165-0. [CrossRef] [Google Scholar]
23. Yin W., Lu M., Tang J., Zhao Q., Zhang Z., Li K., Han Y., Peyton A. Пользовательский МКЭ-решатель краевых элементов и его приложение к вихретоковому моделированию реалистичного 2M-элементного фантома человеческого мозга. Биоэлектромагнетизм. 2018;39: 604–616. doi: 10.1002/bem.22148. [PubMed] [CrossRef] [Google Scholar]
24. Yin W., Lu M., Yin L., Zhao Q., Meng X., Zhang Z., Peyton A. Ускорение расчета вихревых токов для сканирующих датчиков. Insight Non Destr. Тест. конд. Монит. 2018;60:547–555. doi: 10.1784/insi.2018.60.10.547. [CrossRef] [Google Scholar]
25. Yin W., Tang J., Lu M., Xu H., Huang R., Zhao Q., Zhang Z., Peyton A. Явление эквивалентного эффекта в вихревых токах неразрушающий контроль тонких конструкций. IEEE-доступ. 2019;7:70296–70307. doi: 10.1109/ACCESS.2019.2916980. [CrossRef] [Google Scholar]
2019;7:70296–70307. doi: 10.1109/ACCESS.2019.2916980. [CrossRef] [Google Scholar]
26. Zeng Z., Udpa L., Udpa S.S., Chan M.S.C. Формулировка приведенного магнитного векторного потенциала в конечно-элементном анализе вихретокового неразрушающего контроля. IEEE транс. Магн. 2009; 45: 964–967. doi: 10.1109/TMAG.2009.2012486. [CrossRef] [Google Scholar]
27. Papaelias M.P., Lugg M.C., Roberts C., Davis C.L. Скоростной контроль рельсов методами ACFM. НК E Междунар. 2009;42:328–335. doi: 10.1016/j.ndteint.2008.12.008. [Перекрестная ссылка] [Академия Google]
28. Теодулидис Т., Пулакис Н., Драгогиас А. Быстрое вычисление сигналов вихревых токов от узких трещин. НК E Междунар. 2010;43:13–19. doi: 10.1016/j.ndteint.2009.08.005. [CrossRef] [Google Scholar]
29. Теодулидис Т. Аналитическая модель наклонных катушек в вихретоковом неразрушающем контроле. IEEE транс. Магн. 2005;41:2447–2454. doi: 10.1109/TMAG.2005.854331. [CrossRef] [Google Scholar]
30. Берк С. К. Вихретоковая инверсия в пределе тонкой кожи: определение глубины и раскрытия длинной трещины. Дж. Заявл. физ. 1994;76:3072–3080. дои: 10.1063/1.358454. [CrossRef] [Google Scholar]
К. Вихретоковая инверсия в пределе тонкой кожи: определение глубины и раскрытия длинной трещины. Дж. Заявл. физ. 1994;76:3072–3080. дои: 10.1063/1.358454. [CrossRef] [Google Scholar]
31. Dodd C.V., Deeds W.E. Аналитические решения задач вихретокового зонда-катушки. Дж. Заявл. физ. 1968; 39: 2829–2838. дои: 10.1063/1.1656680. [CrossRef] [Google Scholar]
32. Харфилд Н., Боулер Дж. Р. Теория вихретокового взаимодействия тонкой кожи с поверхностными трещинами. Дж. Заявл. физ. 1997; 82: 4590–4603. дои: 10.1063/1.366196. [CrossRef] [Google Scholar]
33. Авила Дж. Р. С., Чен З., Сюй Х., Инь В. Многочастотная система неразрушающего контроля для визуализации и обнаружения трещин; Материалы Международного симпозиума IEEE по схемам и системам (ISCAS) 2018 г. IEEE; Флоренция, Италия. 27–30 мая 2018 г.; стр. 1–4. [Академия Google]
34. Xu H., Lu M., Avila J.R., Zhao Q., Zhou F., Meng X., Yin W. Визуализация поперечного сечения сварного шва с использованием новой частотной характеристики при многочастотном вихретоковом контроле. Insight Non Destr. Тест. конд. Монит. 2019;61:738–743. doi: 10.1784/insi.2019.61.12.738. [CrossRef] [Google Scholar]
Insight Non Destr. Тест. конд. Монит. 2019;61:738–743. doi: 10.1784/insi.2019.61.12.738. [CrossRef] [Google Scholar]
35. Инь Л., Йе Б., Родригес С., Лейва Р., Мэн Х., Акид Р., Инь В., Лу М. Обнаружение очагов коррозии на основе аналитических оптимизированный вихретоковый датчик. Insight Non Destr. Тест. конд. Монит. 2018;60:561–567. doi: 10.1784/insi.2018.60.10.561. [Перекрестная ссылка] [Академия Google]
36. Cheng J., Qiu J., Ji H., Wang E., Takagi T., Uchimoto T. Применение низкочастотного метода ЭСТ для бесконтактного обнаружения и визуализации углепластика. Композиции Часть Б англ. 2017; 110:141–152. doi: 10.1016/j.compositesb.2016.11.018. [CrossRef] [Google Scholar]
37. Cao B.H., Li C., Fan M.B., Ye B., Tian G.Y. Аналитическая модель наклонных катушек драйвер-датчик для вихретокового неразрушающего контроля. Подбородок. физ. Б. 2018;27:30301. doi: 10.1088/1674-1056/27/3/030301. [Перекрестная ссылка] [Академия Google]
38. Лу М., Се Ю., Чжу В., Пейтон А.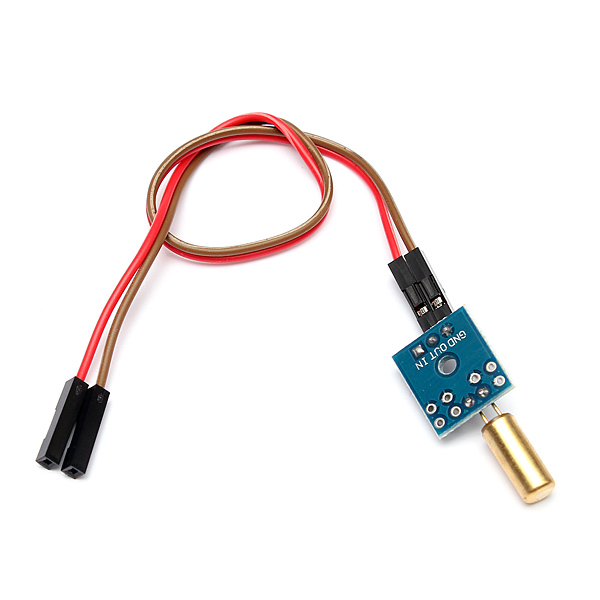 , Инь В. Определение магнитной проницаемости, электропроводности и толщины ферритовых металлических пластин с использованием многочастотной электромагнитной системы измерения. IEEE транс. Инд.информ. 2018;15:4111–4119. doi: 10.1109/TII.2018.2885406. [CrossRef] [Google Scholar]
, Инь В. Определение магнитной проницаемости, электропроводности и толщины ферритовых металлических пластин с использованием многочастотной электромагнитной системы измерения. IEEE транс. Инд.информ. 2018;15:4111–4119. doi: 10.1109/TII.2018.2885406. [CrossRef] [Google Scholar]
39. Лу М., Инь Л., Пейтон А., Инь В. Новый алгоритм компенсации для измерения толщины, устойчивый к отклонениям отрыва, с использованием вихретокового метода. IEEE транс. Инструм. Изм. 2016;65:2773–2779. [Google Scholar]
40. Lu M., Chen L., Meng X., Huang R., Peyton A., Yin W. Измерение толщины металлической пленки на основе высокочастотной характеристики трехкатушечного электромагнитного вихревого тока. датчик. IEEE транс. Инструм. Изм. 2020;70:6001208. [Google Scholar]
41. Лу М., Мэн С., Хуан Р., Чен Л., Пейтон А., Инь В. Измерение расстояния отрыва и электромагнитных свойств металла с использованием функции двухчастотной линейности. IEEE транс. Инструм. Изм. 2020;70:6001409. дои: 10.1109/ТИМ.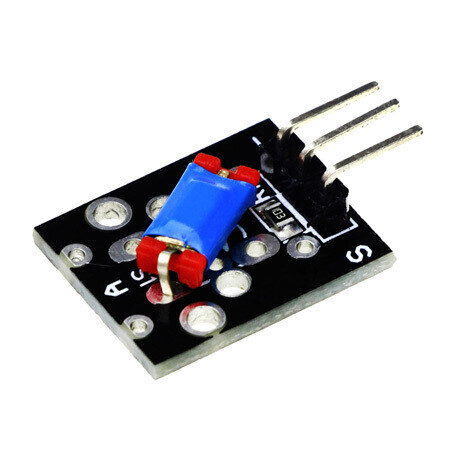
Похожие записи
-

 Сайты своими руками для дома: Создание сайта своими руками бесплатно, как сделать сайт на конструкторе Nethouse
Сайты своими руками для дома: Создание сайта своими руками бесплатно, как сделать сайт на конструкторе Nethouse - Пластиковая лопатка для снятия обшивки салона автомобиля: Лопатки для снятия обшивки в Новосибирске: 328-товаров: бесплатная доставка, скидка-90% [перейти]
- Телефон ми а1: Обзор недорогого смартфона Xiaomi Mi A1 с цельнометаллическим корпусом и хорошей двойной камерой
- Очки carrera реплика: Мужские солнцезащитные очки Carrera (Каррера) реплики купить в Москве