Подключение tb6600: Подключение драйвера шагового двигателя TB6600
Содержание
Драйвер шагового двигателя TB6600 DC12-45V
Драйвер шагового двигателя TB6600 DC12-45V
TB6600 — миниатюрный драйвер шагового двигателя. Все управляющие входы драйвера оптоизолированы. Режим удержания ротора ШД половинным током при простое. Имеет встроенную защиту от перегрева, пониженного напряжения и токовой перегрузки. Устройство оптимально подходит для управления биполярными и униполярными шаговыми двигателями с рабочим током до 4.5А.
Технические характеристики
|
Напряжение питания
|
48В
|
|
Частота сигнала
|
до 200 кГц
|
|
Диапазон рабочего тока
|
0.5 — 4.5А
|
|
Рабочая температура
|
0 — 70 °С
|
Интерфейс
Управляющие сигналы
| CP+ | Step+ |
| CP- | Step- |
Регулировка
| Назначение выводов |
Изменение рабочего тока осуществляется с помощью регулятора Current regulation potentiometer. Он позволяет выбрать ток в диапазоне от 0.5 до 4.5А.
Он позволяет выбрать ток в диапазоне от 0.5 до 4.5А.
Выбор микрошага
Принудительный Enable 1:1 1:2 (A mode) 1:2 (B mode) 1:4 1:8 1:16
A и B mode — настройка изменения формы ШИМ. Подбирается эмпирическим путём.
Переключатель LATCH позволяет выбрать между автоматической и ручной перезагрузкой драйвера в случае возникновения ошибки. ON – автоматическая перезагрузка, OFF – ручная.
Подключение
| Схема подключения входов управляющтх сигналов с общим плюсом | Схема подключения входов управляющтх сигналов с общим минусом |
| Общая схема подключения драйвера. Управляющие сигналы подключены с общим плюсом. | |
| Общая схема подключения драйвера. Управляющие сигналы подключены с общим минусом. | |
Схема подключения драйвера к контроллеру с диференциальными выходами. |
Диагностика неисправностей
|
Не горит индикатор питания
|
1) Нет питания
2) Низкое напряжение питания
|
1) Проверьте подключение к источнику питания
2) Увеличьте напряжение питания
|
|
Двигатель не вращается, нет удерживающего момента
|
1) Неправильное подключение двигателя
2) Нет разрешающего сигнала Enb
|
1) Правильно подключите двигатель
2) Инвертируйте сигнал Enable
|
|
Двигатель не вращается, есть удерживающий момент
|
Неверно подключен сигнал Step
|
Проверьте правильность подключения сигнала Step
|
|
Двигатель вращается в противоположном направлении
|
1) Неправильно подключена фаза ШД
2) Неверная полярность управляющего сигнала Dir
3) Установлен слишком низкий рабочий ток ШД
|
1) Поменяйте местами провода одной фазы ШД
2) Инвертируйте управляющий сигнал Dir
3) Правильно установите рабочий ток ШД
|
Данные микросхемы являются развитием ТВ6560 и допускают номинальный ток на выходе до 4.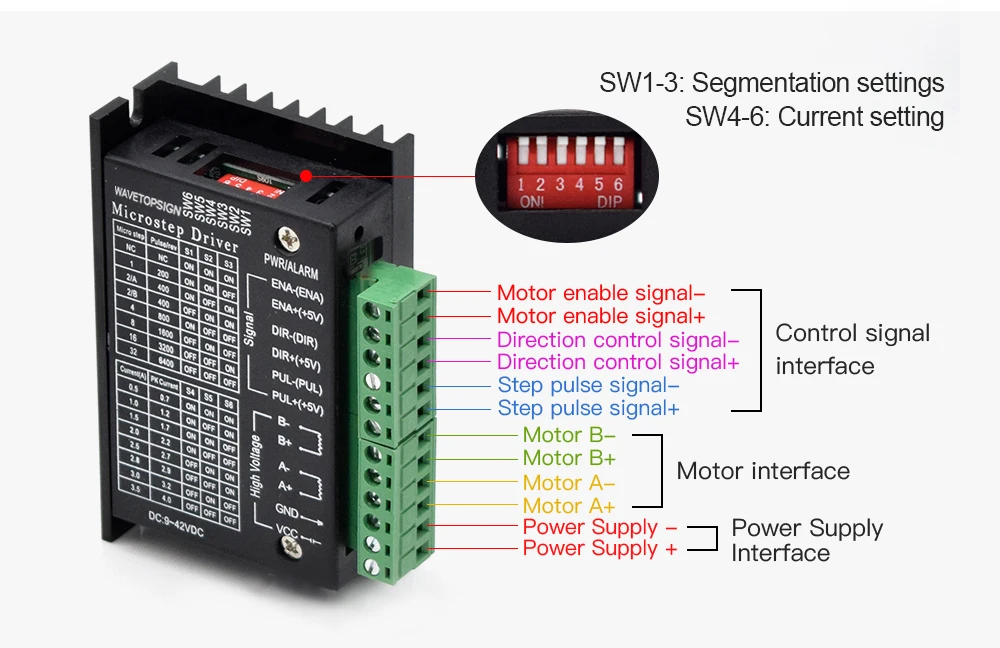 5А (кратковременно 5А), что позволяет применять более мощные шаговые двигатели. Помимо этих микросхем в схемотехнику данных контроллеров внесены и другие изменения — более быстрые оптопары, возможность дискретной настройки выходных токов и т.д. Их внешний вид:
5А (кратковременно 5А), что позволяет применять более мощные шаговые двигатели. Помимо этих микросхем в схемотехнику данных контроллеров внесены и другие изменения — более быстрые оптопары, возможность дискретной настройки выходных токов и т.д. Их внешний вид:
Иногда они выпускаются в металлическом кожухе, который выполняет для ТВ6600 роль радиатора. В этом случае на плате отсутствует локальный радиатор и прикрепленный на нем вентилятор обдува.
На плате также для каждой оси установлены переключатели шага и выходного тока:
Настройка шаговых двигателей осей.
В процессе настройки надо вычислить необходимое количество подаваемых импульсов (шагов) на шаговый двигатель для перемещения управляющей гайки червячной передачи станка на заданную единицу измерения — 1мм.
Например, имеем шаговый двигатель с шагом 1.8 градуса, червячную передачу с шагом резьбы 1.25мм и контроллер, установленный на “полный шаг”. Тогда при подаче на него 200 импульсов (шагов), его вал повернется на (1.8градуса х 200) = 360 градусов (полный оборот) и управляющая гайка червячной передачи сдвинется на 1.25мм.
Тогда при подаче на него 200 импульсов (шагов), его вал повернется на (1.8градуса х 200) = 360 градусов (полный оборот) и управляющая гайка червячной передачи сдвинется на 1.25мм.
Теперь, чтобы гайка сдвинулась на 1мм, надо соответственно уменьшить количество подаваемых на шаговый двигатель импульсов (шагов), которые определяются по формуле: 200/ 1.25мм = 160 импульсов (шагов). Т.е. при 160 импульсах(шагах) управляющая гайка при резьбе с ходом 1.25мм переместится на 1мм.
Если на контроллере установлен неполный шаг, например «полшага», то формула будет иметь следующий вид: 2х200/1.25мм = 320 импульсов (шагов).
Таким образом, изменяя степень “шага” в контроллере, а также зная ход резьбы червячной передачи, по аналогичной формуле можно в дальнейшем рассчитывать количество подаваемых на шаговый двигатель импульсов (шагов) для перемещения управляющей гайки на 1мм.
Учитывая, что наиболее оптимальная работа данного контроллера отмечена при установке “1/8 шага”, возьмем за основу:
— шаг резьбы червячной передачи -1.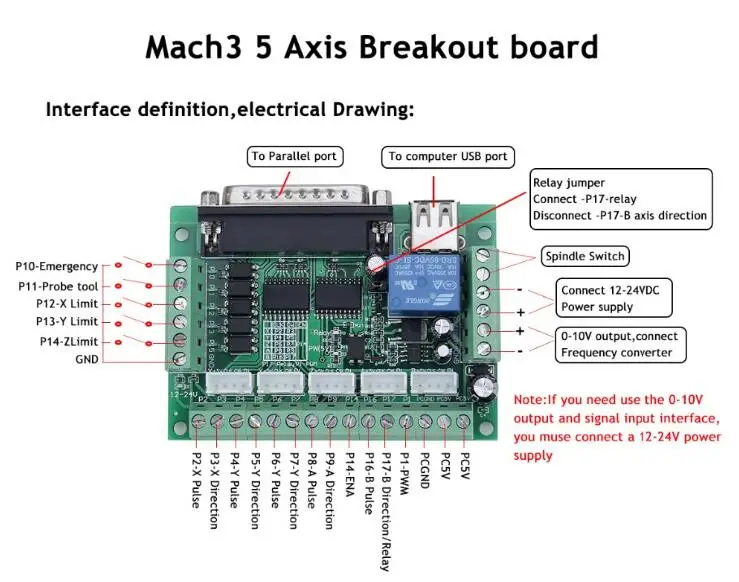 25мм;
25мм;
— контроллер установлен на “1/8 шаг”, т.е. 1мм перемещения управляющей гайки будет соответствовать 8х200/1.25мм=1280 импульсов(шагов) шагового двигателя.
Примечание: перед началом “пусков” шаговых двигателей при выключенном питании на всех 3-х синих переключателях контроллера на ТВ6600 установим:
|
Current Setting
(выходной ток)
| 1 | 2 | Decay Mode Settings | 3 | 4 | MicroStep Settings (шаг) | 5 | 6 |
| 100% | ON | ON | FAST | ON | ON | 1 | ON | ON |
| 75% | ON | OFF | 25% | ON | OFF | 1/2 | ON | OFF |
| 50% | OFF | ON | 50% | OFF | ON | 1/8 | OFF | OFF |
| 25% | OFF | OFF | SLOW | OFF | OFF | 1/16 | OFF | ON |
Требуемые установки выделены жирным текстом с подчеркиванием – OF .
Соответственно для контроллера на ТВ6600 джамперами установим: 1=OFF 2=ON 3=OFF 4=ON 5=OFF 6=ON (1/8шаг, 1.2А выходной ток на ШД).
В дальнейшем данные установки можно будет менять.
Module
Подключение TB6600 к Mach4 — Вопросы по Mach4
#1
OFFLINE
Кубаноид 93
Отправлено 16 Май 2017 — 23:58
Собрал платы и шд ( https://ru.aliexpres… … 0.0.AMzuff) ( https://ru.aliexpres… … .0.0.z2agc)
все работает а шаговые двигатели не крутятся. что делать и как быть. не судите строго я новичек во всем этом.
в mach 3 положение меняется индикатор на драйвере моргает, а движки стоят мертвые. все подключено по схеме. Причем движки не стопоряться крутяться руками.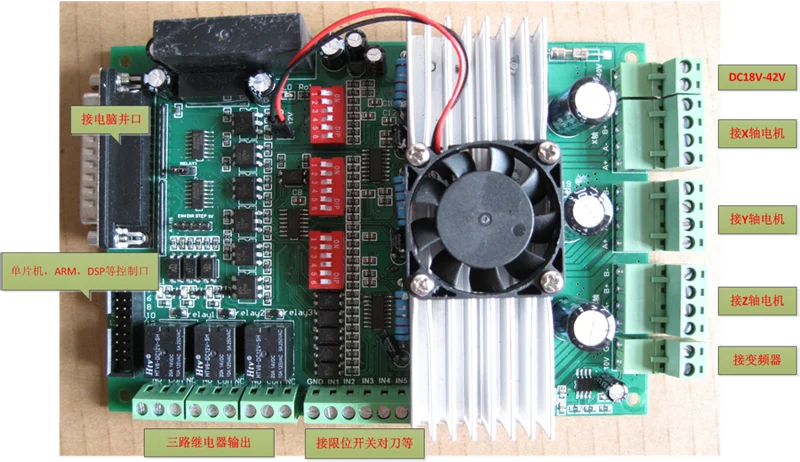 к драйверам подключено питание от 24 вольтового блока. интересует распределение пинов( может неверное)
к драйверам подключено питание от 24 вольтового блока. интересует распределение пинов( может неверное)
Прикрепленные изображения
- Наверх
#2
OFFLINE
Евгений622
Отправлено 17 Май 2017 — 00:44
Ребятушки спасайте новичка.
….жизнь новичка ничего стоит…
Давай выкладывай :
-схему подключения
-распиновку платы
Сообщение отредактировал Евгений622: 17 Май 2017 — 00:44
- Наверх
#3
OFFLINE
slavyan75
Отправлено 17 Май 2017 — 02:03
скрин «выходные сигналы» покажи ; скорее всего EN не назначен
- Наверх
#4
OFFLINE
Кубаноид 93
Отправлено 17 Май 2017 — 03:40
скрин «выходные сигналы» покажи ; скорее всего EN не назначен
Скрины
Давай выкладывай :
-схему подключения
-распиновку платы
Все как нарисовано плюс минус не путал все по цветам проводов. на драйвера питание 24 в идет а от них к движкам не знаю как проверить. Power светиться всегда, Work мигает когда управляешь кнопками при этом положение в Mach меняется а движки стоят.
на драйвера питание 24 в идет а от них к движкам не знаю как проверить. Power светиться всегда, Work мигает когда управляешь кнопками при этом положение в Mach меняется а движки стоят.
Alarm не горел никогда
Прикрепленные изображения
- Наверх
#5
OFFLINE
slavyan75
Отправлено 17 Май 2017 — 19:07
это входные сигналы, а надо «output»
- Наверх
#6
OFFLINE
Кубаноид 93
Отправлено 17 Май 2017 — 21:59
это входные сигналы, а надо «output»
Прикрепленные изображения
Сообщение отредактировал Кубаноид 93: 17 Май 2017 — 21:58
- Наверх
#7
OFFLINE
Евгений622
Отправлено 17 Май 2017 — 23:55
Энабел то назначь .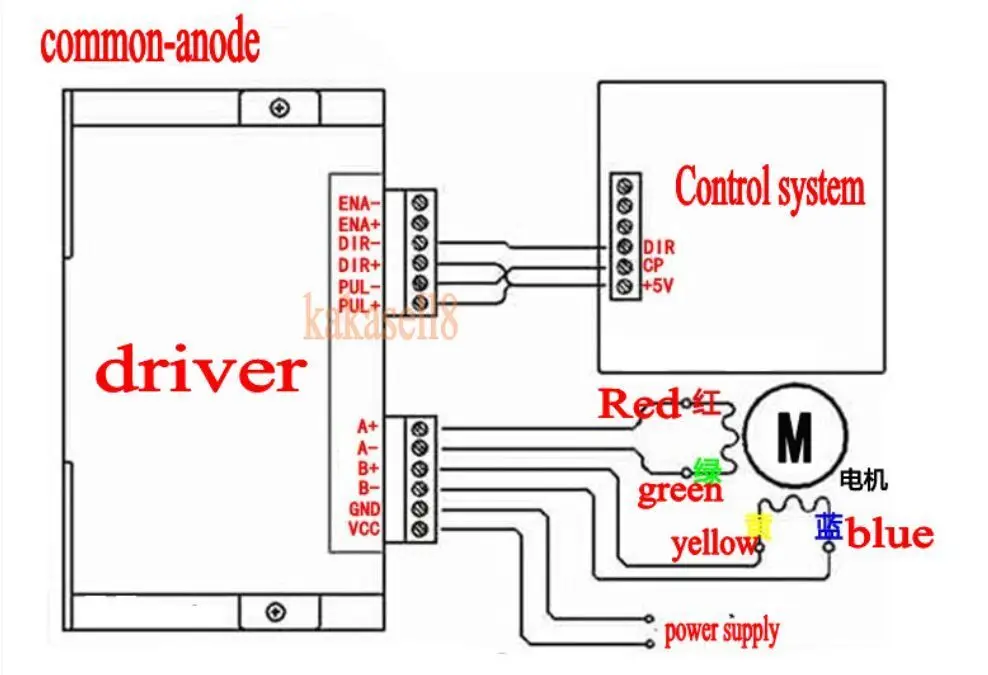 Во второй таблице нужно ввести «пин намбер» . Смотри распиновку.
Во второй таблице нужно ввести «пин намбер» . Смотри распиновку.
Твоя плата сильно похожа на мою последнюю китайчатину , исплевался-изматерился с ней…только моя ещё говённее твоей , даже с виду ….заказал себе свои любимые
LPT DPTR1.03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.
Третья сильно… детали ещё не разглядывал , но даже на вид серьёзнее стала , расположение порта , клеммников изменилось.
Короче если не знаешь номер пина, попробуй -17 , у меня так было.
- Наверх
#8
OFFLINE
slavyan75
Отправлено 18 Май 2017 — 02:03
LPT DPTR1.
03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.
 03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.
03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.в их плате помнится одна ось любила не работать ; а сейчас как ?
а почему с такой платой исплевался ? што не так ?
Сообщение отредактировал slavyan75: 18 Май 2017 — 02:04
- Наверх
#9
OFFLINE
Евгений622
Отправлено 18 Май 2017 — 09:58
в их плате помнится одна ось любила не работать ; а сейчас как ? а почему с такой платой исплевался ? што не так ?
вообще никаких нареканий не было , причины неполадок-исключительно неправильные настройки или неверное подключение.
На мелькой , пятиосевой не мог заставить концевики нормально работать.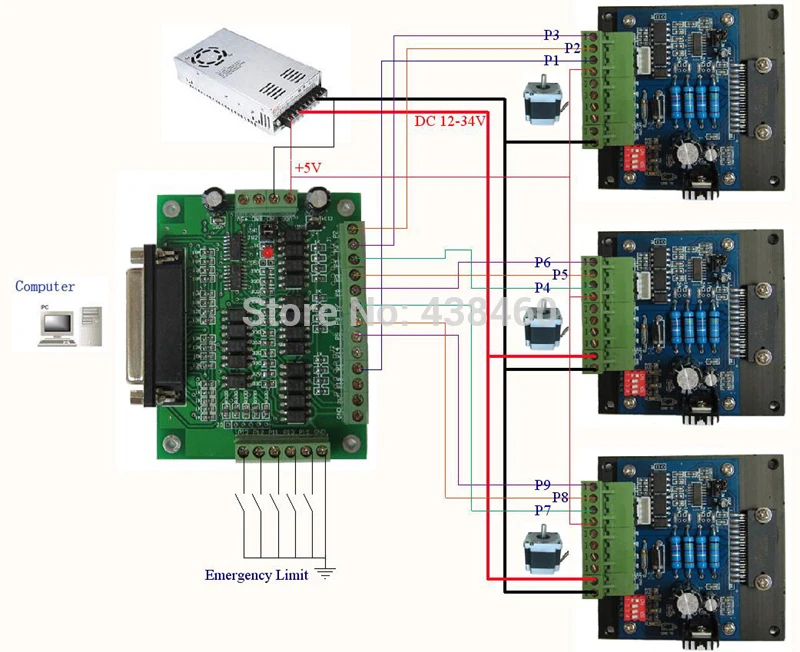 Оно может конечно и Интековский частотник свою работу сделал (были у меня подозрения, что он фонит как чернобыльский снорк) , уж больно задёшево он мне достался.
Оно может конечно и Интековский частотник свою работу сделал (были у меня подозрения, что он фонит как чернобыльский снорк) , уж больно задёшево он мне достался.
Да и эта плата скорее жалкое подобие контроллера (опторазвязки) .
Маленькая , слабенькая , малофункциональная , я очень сильно соменеваюсь , что кто-то построив пятиосевой агрегат будет всерьёз её рассматривать в качестве станочных мозгов. Она создана чтобы заманить покупателя своей мнимой крутизной и продастся , о её работе создатели по моему не думали.
Сообщение отредактировал Евгений622: 18 Май 2017 — 09:59
- Наверх
#10
OFFLINE
nika52
Отправлено 01 Июнь 2017 — 18:39
Купил вот ето чудо
помогите разобраться с тоблицой переключателей
Мач 3
питание 24в нема 23 3А
спасибо
Прикрепленные изображения
- Наверх
#11
OFFLINE
vv92
Отправлено 01 Июнь 2017 — 22:33
1-2-3 — деление шага, 4-5-6 ток, выдаваемый драйвером.
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
- Наверх
#12
OFFLINE
nika52
Отправлено 02 Июнь 2017 — 15:35
Спасибо это понятно и нечего не понятно где на плате их выставлять
и как выставить Ports and Pins в мач 3 3rd_3Axis_TB6600HG NEMA 23 3A питание 24v
- Наверх
#13
OFFLINE
lkbyysq
Отправлено 02 Июнь 2017 — 15:45
Спасибо это понятно и нечего не понятно где на плате их выставлять
Синенькие такие с шестью белыми рычажками, отверточкой шёлк-щёлк.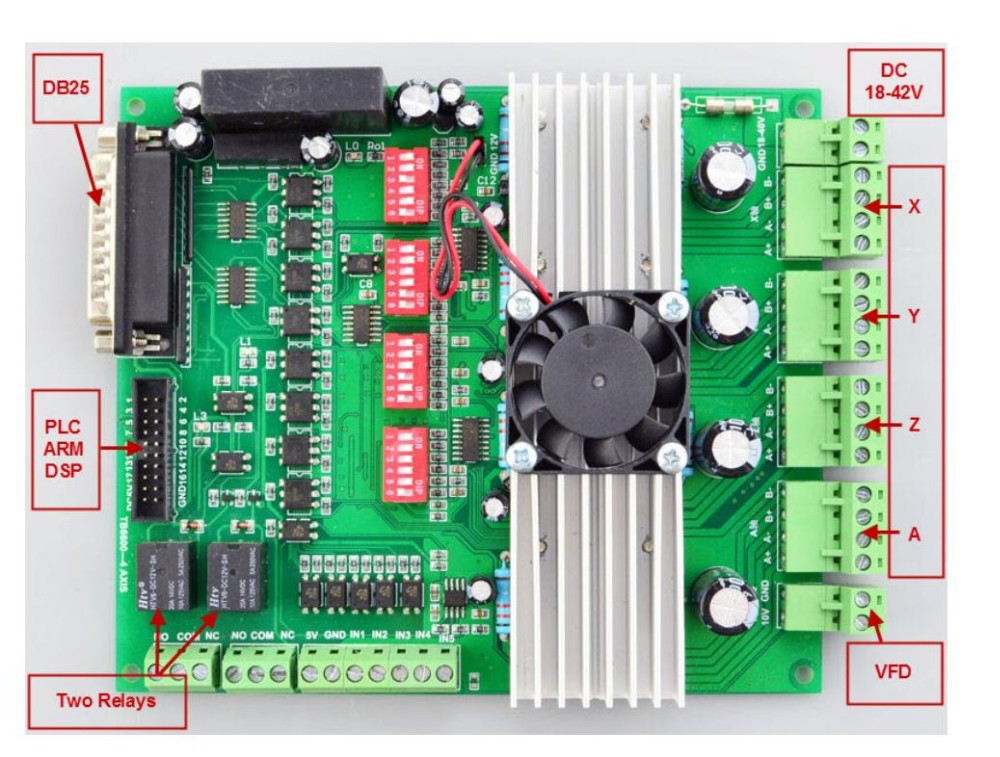
- Наверх
#14
OFFLINE
nika52
Отправлено 02 Июнь 2017 — 17:26
1-2-3 — деление шага, 4-5-6 ток, выдаваемый драйвером.
Синенькие такие с шестью белыми рычажками, отверточкой шёлк-щёлк.
Синенькие ето хорошо а как прикрутить ету таблицу ?
Прикрепленные изображения
- Наверх
#15
OFFLINE
lkbyysq
Отправлено 02 Июнь 2017 — 18:20
SW1. ..SW6 — это номер переключателя.
..SW6 — это номер переключателя.
- Наверх
#16
OFFLINE
T-Rex
Отправлено 02 Июнь 2017 — 23:33
SW1…SW6 — это номер переключателя.
как прикрутить ету таблицу ?
Слово «ON» там же, на корпусе переключателя найдете, вместе с цифрами 1..6.
«NG» или «N/A» в таблице — это «Not Good» или «Not Available». В общем, недопустимая комбинация положения переключателей.
Переключателей на плате три, каждый для своего драйверного канала (X/Y/Z).
Дальше сообразите?
- Наверх
#17
OFFLINE
Евгений622
Отправлено 02 Июнь 2017 — 23:54
Дальше сообразите?
вы , господа , не пуржите. ..если взялись помогать -давайте всё попорядочку…
..если взялись помогать -давайте всё попорядочку…
А то : ткни тут , переключи там…вы , давайте с описанием и назначением каждого действия…
…..Нажимаем большую кнопку на ящике под столом (а у меня нет ящика, у меня как книжка раскладывается…)… и ждём когда после слова » WINDOWS» появлятся жёлтенькие папочки на экране…
Чувак похоже даже стандартную инструкцию по настройке мача не читал…
Сообщение отредактировал Евгений622: 02 Июнь 2017 — 23:57
- Наверх
#18
OFFLINE
preps
Отправлено 03 Июнь 2017 — 20:51
Перестаньте уже к мачу подключать всякую гадость 🙂
- Наверх
#19
OFFLINE
nika52
Отправлено 04 Июнь 2017 — 13:04
вы , господа , не пуржите.
А то : ткни тут , переключи там…вы , давайте с описанием и назначением каждого действия…
…..Нажимаем большую кнопку на ящике под столом (а у меня нет ящика, у меня как книжка раскладывается…)… и ждём когда после слова » WINDOWS» появлятся жёлтенькие папочки на экране…
Чувак похоже даже стандартную инструкцию по настройке мача не читал…
 ..если взялись помогать -давайте всё попорядочку…
..если взялись помогать -давайте всё попорядочку…Всем спасибо инструкцию я читал дело в том что плата шла с дохлой СД а на посторах конкретной платы нет
и выстовить все пины в слепую для меня проблема до этого работал с платой TB6560
- Наверх
#20
OFFLINE
sergenij72
Отправлено 08 Ноябрь 2017 — 10:15
Энабел то назначь .
Твоя плата сильно похожа на мою последнюю китайчатину , исплевался-изматерился с ней…только моя ещё говённее твоей , даже с виду ….заказал себе свои любимые
LPT DPTR1.03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.
Третья сильно… детали ещё не разглядывал , но даже на вид серьёзнее стала , расположение порта , клеммников изменилось.Короче если не знаешь номер пина, попробуй -17 , у меня так было.
 Во второй таблице нужно ввести «пин намбер» . Смотри распиновку.
Во второй таблице нужно ввести «пин намбер» . Смотри распиновку. Доброго раннего утра.Собираю сейчас электрику абсолютно такую же как товарищ выше.Пока ещё не собрал,но решил заранее все прояснить.Если не затруднит поясните.У вас говорилось назначить энейбл,а какой,там их 6 как я понял или все проставить.И ещё я опять же как я понял,этот пин 14,судя по схеме подключения,или я не там смотрю.Обьясните если не сложно,я не спец,по электронике,но у меня есть маленький китаец,вот решил заняться его модернизацией,а то в нем много чего отсутствует в принципе.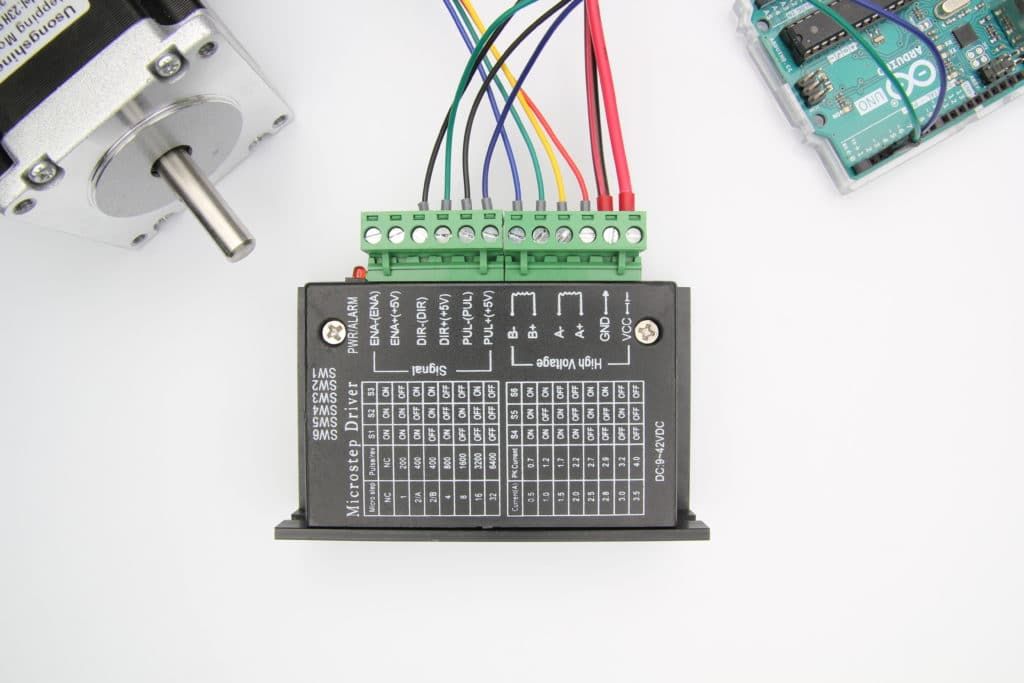 Заранее спасибо!
Заранее спасибо!
- Наверх
Эксплуатация Контроллер шагового двигателя TB6600 с параллельным портом ПК
Рис. 1 Контроллер шагового двигателя TB6600.
от Lewis Loflin
TB6600 — это дешевый контроллер шагового двигателя, доступный на Ebay примерно за 10 долларов. Он одноосевой и работает с биполярными шаговыми двигателями от 9 до 40 вольт при силе тока около 4 ампер.
Я сделал два видеоролика и веб-страницу об использовании TB6600 с микроконтроллером Arduino. Здесь я буду использовать это с параллельным портом ПК или портом принтера.
См. ссылки ниже для более ранних видеороликов и Arduino.
Использование TB6600 с Arduino:
- Контроллер шагового двигателя TB6600 Arduino, часть 1 Youtube
- Контроллер шагового двигателя TB6600 Arduino Часть 2 Youtube
- TB6600 с Arduino
Драйвер шагового двигателя
Цели следующие:
1) более глубокий взгляд на проводку и соединения TB6600;
2) продемонстрировать использование параллельного порта как настоящего 8-битного аппаратного порта;
3) продемонстрировать манипуляции с битами с помощью побитовых операторов в C.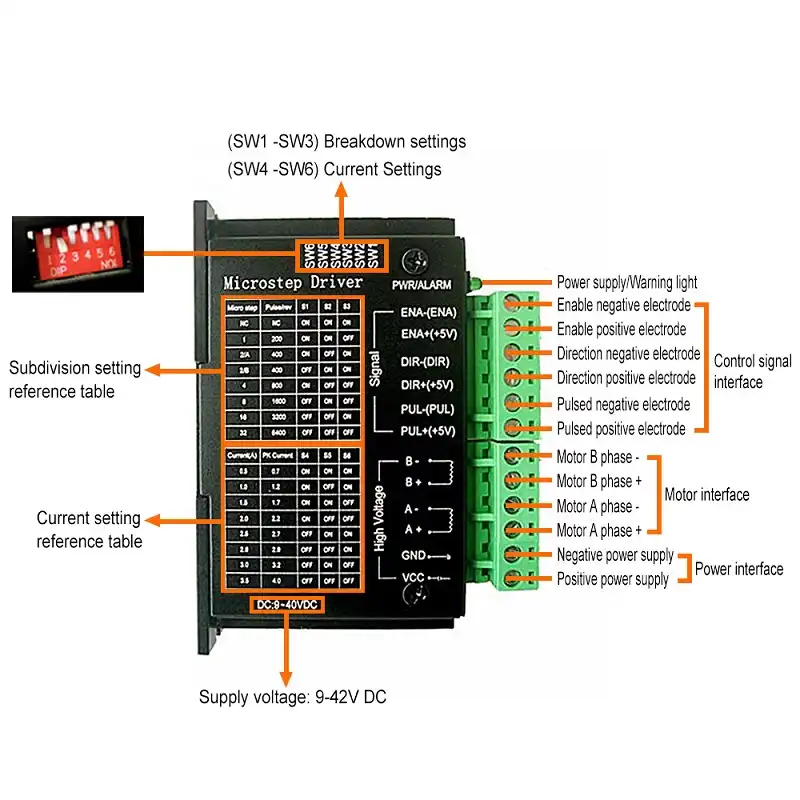
На рис. 1 выше показан TB6600. Он имеет три контакта управления (включение, счет, направление), четыре контакта для биполярного шагового двигателя и шесть микропереключателей настройки.
Три переключателя настройки выбирают ограничение тока. Другая настройка микрошага. Они будут объяснены на следующих трех слайдах.
Рис. 2 Микропереключатели контроллера шагового двигателя TB6600.
Настройка микрошага, общее заземление
Давайте посмотрим на рис. 2. Обратите внимание на три управляющих соединения для микрошага. S1, S2 и S3 — множители шага на 360 градусов.
Например мой мотор на видео делал 7,5 градусов на шаг или 48 шагов на 360 градусов. Для шагового двигателя 1,8 градуса требуется 200 шагов на 360 градусов.
Установка переключателей делит шаг ангела, а не количество шагов. Используя 4 в качестве примера, разделив 7,5 градуса на 4 = 1,875 градуса на шаг или 19.6 шагов на 360 градусов.
В случае двигателя с шагом 1,8 градуса для поворота на 360 градусов требуется 800 шагов.
Рис. 3 Ограничители тока контроллера шагового двигателя TB6600.
Ограничение тока
TB6600 также имеет встроенную функцию ограничения тока, которая упрощает работу с напряжением двигателя.
Например, у меня есть шаговый двигатель на 5 вольт, 1 ампер. Установка переключателей S4, S5 и S6 на 0,5 А или 1 А гарантирует, что 12-вольтовая мощность (с правильным номинальным током) может управлять 5-вольтовым двигателем.
Рис. 4 Основные электрические соединения контроллера шагового двигателя TB6600.
Рис. 5 Самодельная параллельная разделительная доска.
Подключения и эксплуатация
На рис. 5 показана моя коммутационная плата параллельного порта. Фактические электрические соединения, которые я использую, показаны на рис. 2. Или вы можете купить коммутационную плату параллельного порта с ЧПУ, чтобы сделать то же самое.
Питание (5 вольт) в обоих случаях поступает от порта USB.
См. следующее:
- Взлом платы параллельного порта MACh4
Базовый адрес порта принтера ПК: 0x378. Это 8-битный двунаправленный. Буферизируется набором 74LS245 для вывода. 74LS245 DIR на контакте 1 HIGH, включить контакт 19 OE LOW.
PPORT, контакты 2-9 (разъем DB25) на 74LS245, контакты A1-A8. Выход B1-B8 — это D0-D7. См. спецификацию. Провод с общим заземлением.
Контроллер шагового двигателя T6600: от PUL+ до PPORT D0, PUL- GRD; Пульс НИЗКИЙ-ВЫСОКИЙ-НИЗКИЙ.
DIR+ на PPORT D1, DIR- GND. D1 ВЫСОКИЙ по часовой стрелке; D1 НИЗКИЙ против часовой стрелки.
ENA+ в PPORT D2, ENA-GRD. Двигатель D2 HIGH выключен, двигатель D2 LOW включен. Если ENA не подключен, двигатель всегда включен. Двигатель будет заблокирован, может нагреться. Таким образом, ENA LOW блокирует двигатель до импульса.
Тестовое ПО
Скачать тестовое ПО tb6600.txt
- Домашняя страница Hobby Electronics
- Пожертвовать
- Изучение цифровой компьютерной электроники
- Оборудование
- Обзор оборудования Подключение параллельных портов ПК
- Контроллер шагового двигателя Operation TB6600 с параллельным портом 9 ПК0019
- Создать или купить коммутационную плату с параллельным портом?
- Build Serial HD44780, подключаемый к параллельному порту
- Материнские платы
- Спасательный игровой компьютер Presario CM1001 1999 года
- Живой тест 2002 Материнская плата VIA EPIA-800 Mini ITX
- Утилизация, тест 2012 AAEON EMB-B75A Промышленная материнская плата
ЖК-дисплей
Посмотреть все мои видео на You Tube
Также посетите мой канал YouTube и подпишитесь на него
- Main Light Fast Linux Desktops with Openbox, JWM
- Проверка повторного использования излишков блоков питания для ПК
- Добавить док-станцию запуска WBAR в Raspberry Pi
- Добавление музыкального проигрывателя терминала MPG123 в Raspberry Pi, Linux
- Основы управления звуком Alsamixer для Linux
- Добавление твердотельного жесткого диска в Raspberry Pi
- Подайте звуковой сигнал в динамик ПК Добавьте звуковой сигнал в Raspberry Pi
- Использование программы установки обоев FEH под Linux
- Программное обеспечение для снятия скриншотов Scrot Lite для Linux
- Использование облегченного текстового редактора Beaver
- Установите Viewnior Image Viewer для Linux
- Руководство по управлению звуком Zmixer ALSA
- Учебник Xinitrc Desktop Manager Control для Linux
- Настройка Raspberry Pi с помощью диспетчера окон JWM
- Вне офиса:
- Веб-мастер
- Три города VA-TN
- Общие науки
- Хобби-электроника
- Конституция США
- Христианство 101
- Религиозные темы
- Электронная почта
Веб-сайт Copyright Lewis Loflin, Все права защищены.
Если вы используете этот материал на другом сайте, предоставьте ссылку на мой сайт.
Драйвер биполярного шагового двигателя 4,5 А на базе TB6600
Плата привода биполярного шагового двигателя, описанная здесь, была разработана на базе микросхемы TB6600HG. TB6600HG представляет собой одночиповый биполярный синусоидальный микрошаговый шаговый драйвер с ШИМ-прерывателем. Максимальная нагрузка 4,5 А, питание от 10 до 42 В постоянного тока.
Особенности
- На основе одного и второго чипов для автоматического управления половинным током
- Подходит для биполярных шаговых двигателей Nema17, Nema23, Nema34
- Подходит для 4-проводного, 6-проводного и 8-проводного шагового двигателя.
- Доступно прямое и обратное вращение
- Приводы с возможностью выбора фазы (микрошаг) 1/1, 1/2, 1/4, 1/8 и 1/16
- Максимальное входное питание 42 В постоянного тока Минимальное входное питание 10 В постоянного тока
- Выходной ток 4,5 А
- Светодиодный индикатор монитора отказа выхода
- Встроенный светодиодный индикатор питания
- Встроенный индикатор входного импульса шага
- Встроенная схема автоматического снижения тока наполовину в режиме ожидания
- Встроенный термовыключатель (IC)
- Встроенная схема блокировки пониженного напряжения (UVLO) (IC)
- Встроенная схема обнаружения перегрузки по току (ISD) (IC)
- Большой конденсатор для защиты от пускового тока
Применение
- Робототехника
- Принтеры большого формата
- ЧПУ
- Маршрутизаторы
- 3D-принтеры
- Автоматизация машин
- Наклонно-поворотные головки камеры
- Игровой автомат
- Торговый автомат
Теплоотвод и тепловое отключение
На плате есть резисторы для измерения тока, и эти резисторы настроены на максимальный ток нагрузки 4,5 А. Если вы используете двигатель с меньшим током, установите PR1-Preset (потенциометр) на требуемое значение уровень для мотора. При максимальной токовой нагрузке микросхема TB6600 через некоторое время перегреется и загорится КРАСНЫЙ светодиод. Этот светодиод гаснет, как только температура падает до безопасного рабочего уровня.
Если вы используете двигатель с меньшим током, установите PR1-Preset (потенциометр) на требуемое значение уровень для мотора. При максимальной токовой нагрузке микросхема TB6600 через некоторое время перегреется и загорится КРАСНЫЙ светодиод. Этот светодиод гаснет, как только температура падает до безопасного рабочего уровня.
Микрошаг
4-позиционный DIP-переключатель используется для установки режимов микрошага (Полный, Половина, Восемь, Шестнадцатый). См. таблицу настроек Микрошага. Настройки DIP-переключателя следует изменять при выключенном питании, чтобы правильный выбор был активен при включении питания.
Шаговый импульс
Минимальный положительный коэффициент заполнения входного шагового импульса должен составлять 2,2 мкс и требуемый сигнал 5 В (TTL). Положительный импульс на ступенчатом входе активирует ступенчатую операцию.
Настройки тока
Средний ток привода можно установить с помощью предварительной настройки (потенциометр на плате PR1). Встроенный разъем CN7 (CT) предназначен для измерения напряжения и установки тока двигателя (крутящего момента). Диапазон напряжения для установки крутящего момента От 0,3 В до 3,5 В
Встроенный разъем CN7 (CT) предназначен для измерения напряжения и установки тока двигателя (крутящего момента). Диапазон напряжения для установки крутящего момента От 0,3 В до 3,5 В
Меры предосторожности
- Никогда не подключайте и не отключайте провода питания, провода двигателя или входной интерфейс при включенном питании, это может привести к повреждению привода.
- Переключите питание, чтобы установить микрошаг
- Прежде чем использовать этот привод, пожалуйста, получите достоверную информацию о шаговых двигателях, импедансе двигателя, индуктивности и других характеристиках.
Входы
Все входы оптически изолированы для защиты устройства от любых помех, коротких замыканий.
- Включить: Требуется вход 5 В пост.
- Направление: требуется вход 5 В пост. тока, установите высокий входной сигнал вращения по часовой стрелке, установите низкий входной сигнал вращения против часовой стрелки, направление двигателя зависит от того, как был подключен шаговый двигатель.

Похожие записи
-

 Huawei charger 40w: Huawei USB Home Fast Charger 40W With Type C Cable 1 m
Huawei charger 40w: Huawei USB Home Fast Charger 40W With Type C Cable 1 m - Уничтожитель ржавчины б 52: Уничтожитель ржавчины Вершина В-52, гелевый, для чёрных и цветных металлов, 550г. Купить по доступной цене в интернет-магазине Гиперавто. (13285)
- Как использовать маску от черных точек lanbena: Маска LANBENA для очищения носа от черных точек + 60 бумажных полосок-стикеров — купить по выгодной цене 490 ₽ | Golden Patch
- Напряжение отсечки аккумулятора: Напряжение отсечки литий-ионного аккумулятора — минимальное напряжение и напряжение разряда-battery-knowledge