Подключение tb6600: Подключение драйвера шагового двигателя TB6600
Содержание
Подключение TB6600 к Mach4 — Вопросы по Mach4
#1
OFFLINE
Кубаноид 93
Отправлено 16 Май 2017 — 23:58
Собрал платы и шд ( https://ru.aliexpres… … 0.0.AMzuff) ( https://ru.aliexpres… … .0.0.z2agc)
все работает а шаговые двигатели не крутятся. что делать и как быть. не судите строго я новичек во всем этом.
в mach 3 положение меняется индикатор на драйвере моргает, а движки стоят мертвые. все подключено по схеме. Причем движки не стопоряться крутяться руками. к драйверам подключено питание от 24 вольтового блока. интересует распределение пинов( может неверное)
Прикрепленные изображения
- Наверх
#2
OFFLINE
Евгений622
Отправлено 17 Май 2017 — 00:44
Ребятушки спасайте новичка.
….жизнь новичка ничего стоит…
Давай выкладывай :
-схему подключения
-распиновку платы
Сообщение отредактировал Евгений622: 17 Май 2017 — 00:44
- Наверх
#3
OFFLINE
slavyan75
Отправлено 17 Май 2017 — 02:03
скрин «выходные сигналы» покажи ; скорее всего EN не назначен
- Наверх
#4
OFFLINE
Кубаноид 93
Отправлено 17 Май 2017 — 03:40
скрин «выходные сигналы» покажи ; скорее всего EN не назначен
Скрины
Давай выкладывай :
-схему подключения
-распиновку платы
Все как нарисовано плюс минус не путал все по цветам проводов.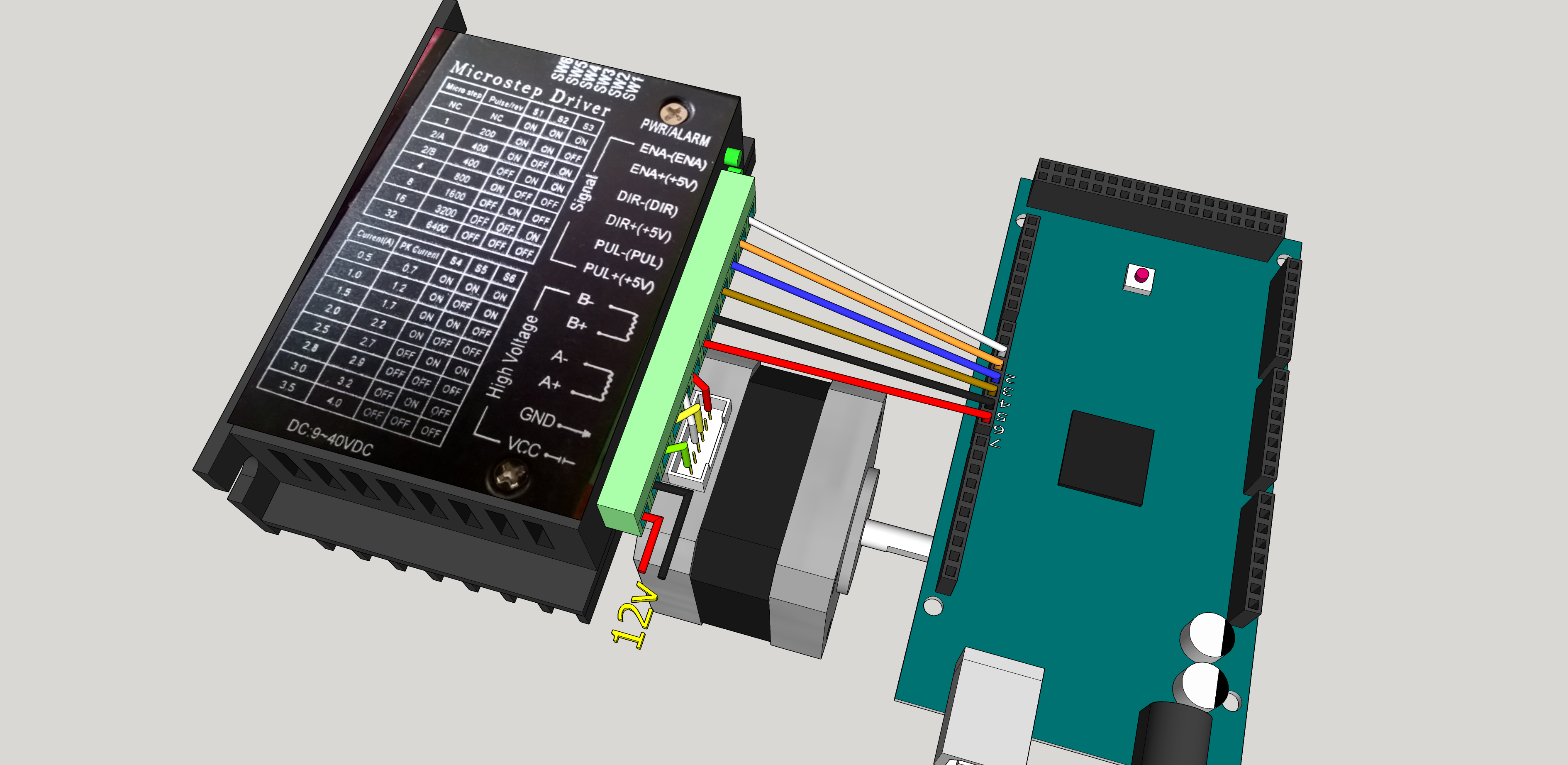 на драйвера питание 24 в идет а от них к движкам не знаю как проверить. Power светиться всегда, Work мигает когда управляешь кнопками при этом положение в Mach меняется а движки стоят.
на драйвера питание 24 в идет а от них к движкам не знаю как проверить. Power светиться всегда, Work мигает когда управляешь кнопками при этом положение в Mach меняется а движки стоят.
Alarm не горел никогда
Прикрепленные изображения
- Наверх
#5
OFFLINE
slavyan75
Отправлено 17 Май 2017 — 19:07
это входные сигналы, а надо «output»
- Наверх
#6
OFFLINE
Кубаноид 93
Отправлено 17 Май 2017 — 21:59
это входные сигналы, а надо «output»
Прикрепленные изображения
Сообщение отредактировал Кубаноид 93: 17 Май 2017 — 21:58
- Наверх
#7
OFFLINE
Евгений622
Отправлено 17 Май 2017 — 23:55
Энабел то назначь . Во второй таблице нужно ввести «пин намбер» . Смотри распиновку.
Во второй таблице нужно ввести «пин намбер» . Смотри распиновку.
Твоя плата сильно похожа на мою последнюю китайчатину , исплевался-изматерился с ней…только моя ещё говённее твоей , даже с виду ….заказал себе свои любимые
LPT DPTR1.03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.
Третья сильно… детали ещё не разглядывал , но даже на вид серьёзнее стала , расположение порта , клеммников изменилось.
Короче если не знаешь номер пина, попробуй -17 , у меня так было.
- Наверх
#8
OFFLINE
slavyan75
Отправлено 18 Май 2017 — 02:03
LPT DPTR1.
03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.
BB5002_BL-TB6600.png) 03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.
03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.в их плате помнится одна ось любила не работать ; а сейчас как ?
а почему с такой платой исплевался ? што не так ?
Сообщение отредактировал slavyan75: 18 Май 2017 — 02:04
- Наверх
#9
OFFLINE
Евгений622
Отправлено 18 Май 2017 — 09:58
в их плате помнится одна ось любила не работать ; а сейчас как ? а почему с такой платой исплевался ? што не так ?
вообще никаких нареканий не было , причины неполадок-исключительно неправильные настройки или неверное подключение.
На мелькой , пятиосевой не мог заставить концевики нормально работать. Оно может конечно и Интековский частотник свою работу сделал (были у меня подозрения, что он фонит как чернобыльский снорк) , уж больно задёшево он мне достался.
Оно может конечно и Интековский частотник свою работу сделал (были у меня подозрения, что он фонит как чернобыльский снорк) , уж больно задёшево он мне достался.
Да и эта плата скорее жалкое подобие контроллера (опторазвязки) .
Маленькая , слабенькая , малофункциональная , я очень сильно соменеваюсь , что кто-то построив пятиосевой агрегат будет всерьёз её рассматривать в качестве станочных мозгов. Она создана чтобы заманить покупателя своей мнимой крутизной и продастся , о её работе создатели по моему не думали.
Сообщение отредактировал Евгений622: 18 Май 2017 — 09:59
- Наверх
#10
OFFLINE
nika52
Отправлено 01 Июнь 2017 — 18:39
Купил вот ето чудо
помогите разобраться с тоблицой переключателей
Мач 3
питание 24в нема 23 3А
спасибо
Прикрепленные изображения
- Наверх
#11
ONLINE
vv92
Отправлено 01 Июнь 2017 — 22:33
1-2-3 — деление шага, 4-5-6 ток, выдаваемый драйвером.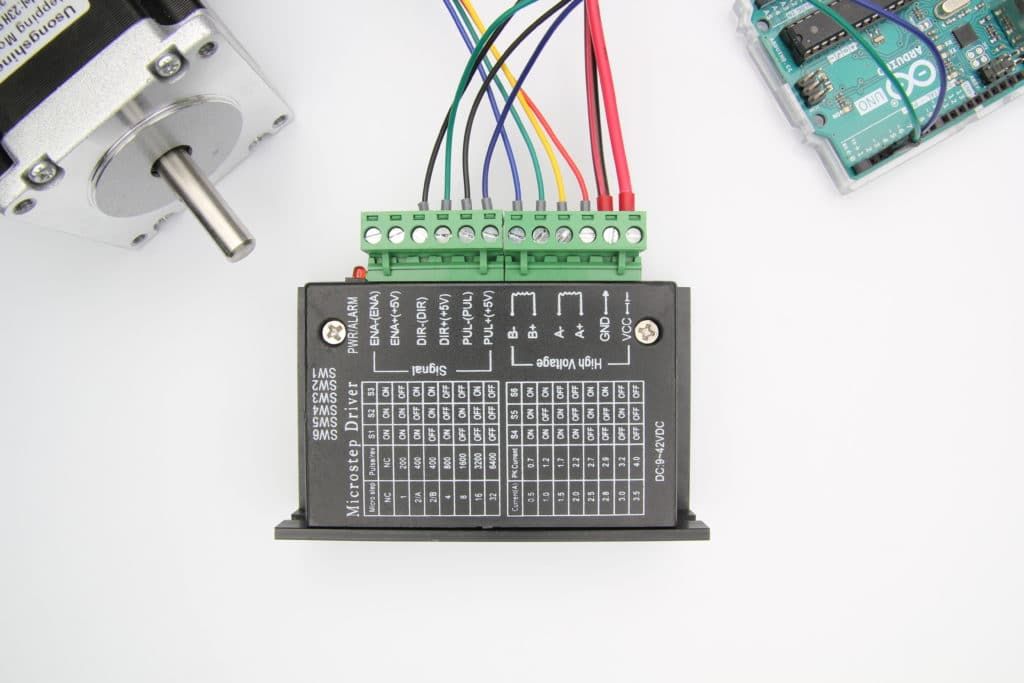
Знаю технику безопасности как свои три пальца.Эксперт — это существо, которое перестало мыслить, ибо оно знает!В мире еще много граблей, на которые не ступала нога человека.
Пожалуйста! Исправляйте мои глупые ошибки (но оставьте мои умные ошибки)!
- Наверх
#12
OFFLINE
nika52
Отправлено 02 Июнь 2017 — 15:35
Спасибо это понятно и нечего не понятно где на плате их выставлять
и как выставить Ports and Pins в мач 3 3rd_3Axis_TB6600HG NEMA 23 3A питание 24v
- Наверх
#13
ONLINE
lkbyysq
Отправлено 02 Июнь 2017 — 15:45
Спасибо это понятно и нечего не понятно где на плате их выставлять
Синенькие такие с шестью белыми рычажками, отверточкой шёлк-щёлк.
- Наверх
#14
OFFLINE
nika52
Отправлено 02 Июнь 2017 — 17:26
1-2-3 — деление шага, 4-5-6 ток, выдаваемый драйвером.
Синенькие такие с шестью белыми рычажками, отверточкой шёлк-щёлк.
Синенькие ето хорошо а как прикрутить ету таблицу ?
Прикрепленные изображения
- Наверх
#15
ONLINE
lkbyysq
Отправлено 02 Июнь 2017 — 18:20
SW1.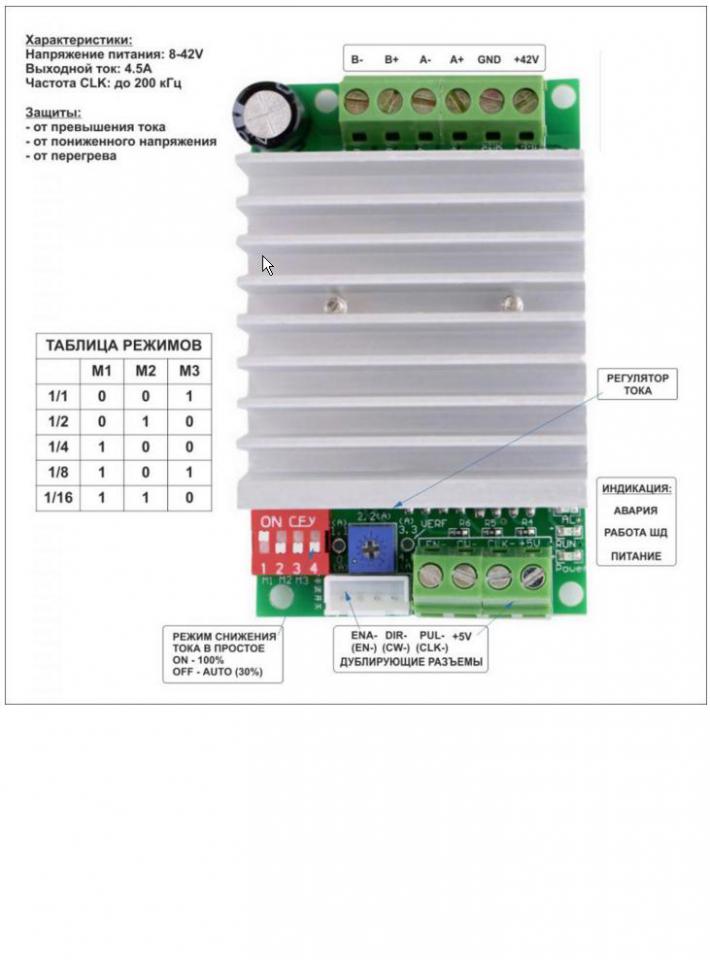 ..SW6 — это номер переключателя.
..SW6 — это номер переключателя.
- Наверх
#16
OFFLINE
T-Rex
Отправлено 02 Июнь 2017 — 23:33
SW1…SW6 — это номер переключателя.
как прикрутить ету таблицу ?
Слово «ON» там же, на корпусе переключателя найдете, вместе с цифрами 1..6.
«NG» или «N/A» в таблице — это «Not Good» или «Not Available». В общем, недопустимая комбинация положения переключателей.
Переключателей на плате три, каждый для своего драйверного канала (X/Y/Z).
Дальше сообразите?
- Наверх
#17
OFFLINE
Евгений622
Отправлено 02 Июнь 2017 — 23:54
Дальше сообразите?
вы , господа , не пуржите. ..если взялись помогать -давайте всё попорядочку…
..если взялись помогать -давайте всё попорядочку…
А то : ткни тут , переключи там…вы , давайте с описанием и назначением каждого действия…
…..Нажимаем большую кнопку на ящике под столом (а у меня нет ящика, у меня как книжка раскладывается…)… и ждём когда после слова » WINDOWS» появлятся жёлтенькие папочки на экране…
Чувак похоже даже стандартную инструкцию по настройке мача не читал…
Сообщение отредактировал Евгений622: 02 Июнь 2017 — 23:57
- Наверх
#18
OFFLINE
preps
Отправлено 03 Июнь 2017 — 20:51
Перестаньте уже к мачу подключать всякую гадость 🙂
- Наверх
#19
OFFLINE
nika52
Отправлено 04 Июнь 2017 — 13:04
вы , господа , не пуржите.
А то : ткни тут , переключи там…вы , давайте с описанием и назначением каждого действия…
…..Нажимаем большую кнопку на ящике под столом (а у меня нет ящика, у меня как книжка раскладывается…)… и ждём когда после слова » WINDOWS» появлятся жёлтенькие папочки на экране…
Чувак похоже даже стандартную инструкцию по настройке мача не читал…
 ..если взялись помогать -давайте всё попорядочку…
..если взялись помогать -давайте всё попорядочку…Всем спасибо инструкцию я читал дело в том что плата шла с дохлой СД а на посторах конкретной платы нет
и выстовить все пины в слепую для меня проблема до этого работал с платой TB6560
- Наверх
#20
OFFLINE
sergenij72
Отправлено 08 Ноябрь 2017 — 10:15
Энабел то назначь .
Твоя плата сильно похожа на мою последнюю китайчатину , исплевался-изматерился с ней…только моя ещё говённее твоей , даже с виду ….заказал себе свои любимые
LPT DPTR1.03 !!! третья серия вышла . За полтора года Ивановцы уже третью модификацию выпускают . Вторая от первой не сильно отличалась.
Третья сильно… детали ещё не разглядывал , но даже на вид серьёзнее стала , расположение порта , клеммников изменилось.Короче если не знаешь номер пина, попробуй -17 , у меня так было.
 Во второй таблице нужно ввести «пин намбер» . Смотри распиновку.
Во второй таблице нужно ввести «пин намбер» . Смотри распиновку. Доброго раннего утра.Собираю сейчас электрику абсолютно такую же как товарищ выше.Пока ещё не собрал,но решил заранее все прояснить.Если не затруднит поясните.У вас говорилось назначить энейбл,а какой,там их 6 как я понял или все проставить.И ещё я опять же как я понял,этот пин 14,судя по схеме подключения,или я не там смотрю.Обьясните если не сложно,я не спец,по электронике,но у меня есть маленький китаец,вот решил заняться его модернизацией,а то в нем много чего отсутствует в принципе. Заранее спасибо!
Заранее спасибо!
- Наверх
Драйвер шагового двигателя TB6600 DC12-45V
Драйвер шагового двигателя TB6600 DC12-45V
TB6600 — миниатюрный драйвер шагового двигателя. Все управляющие входы драйвера оптоизолированы. Режим удержания ротора ШД половинным током при простое. Имеет встроенную защиту от перегрева, пониженного напряжения и токовой перегрузки. Устройство оптимально подходит для управления биполярными и униполярными шаговыми двигателями с рабочим током до 4.5А.
Технические характеристики
|
Напряжение питания
|
48В
|
|
Частота сигнала
|
до 200 кГц
|
|
Диапазон рабочего тока
|
0.5 — 4.5А
|
|
Рабочая температура
|
0 — 70 °С
|
Интерфейс
Управляющие сигналы
| CP+ | Step+ |
| CP- | Step- |
Регулировка
| Назначение выводов |
Изменение рабочего тока осуществляется с помощью регулятора Current regulation potentiometer.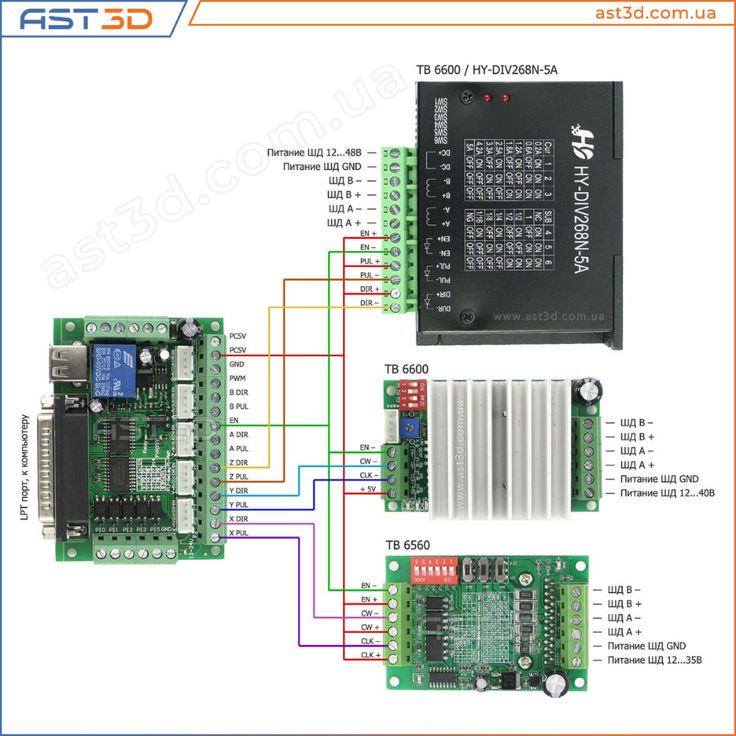 Он позволяет выбрать ток в диапазоне от 0.5 до 4.5А.
Он позволяет выбрать ток в диапазоне от 0.5 до 4.5А.
Выбор микрошага
Принудительный Enable 1:1 1:2 (A mode) 1:2 (B mode) 1:4 1:8 1:16
A и B mode — настройка изменения формы ШИМ. Подбирается эмпирическим путём.
Переключатель LATCH позволяет выбрать между автоматической и ручной перезагрузкой драйвера в случае возникновения ошибки. ON – автоматическая перезагрузка, OFF – ручная.
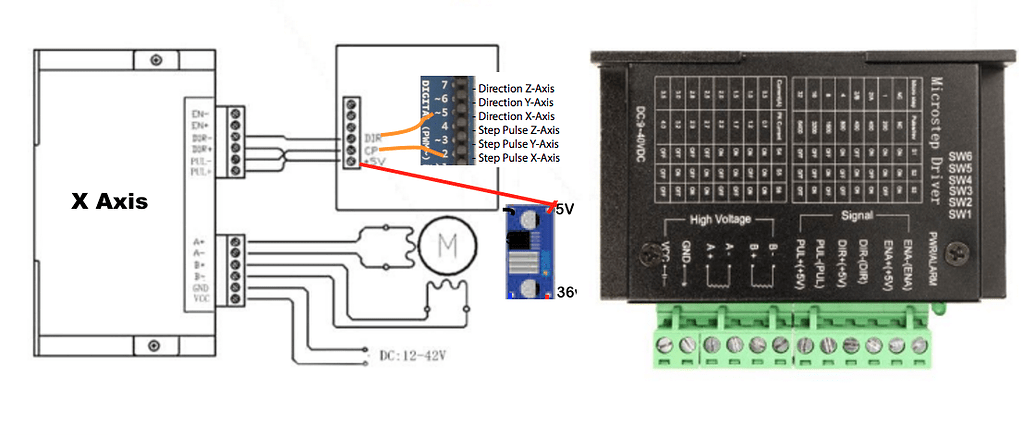
Подключение
| Схема подключения входов управляющтх сигналов с общим плюсом | Схема подключения входов управляющтх сигналов с общим минусом |
| Общая схема подключения драйвера. Управляющие сигналы подключены с общим плюсом. | |
| Общая схема подключения драйвера. Управляющие сигналы подключены с общим минусом. | |
Схема подключения драйвера к контроллеру с диференциальными выходами.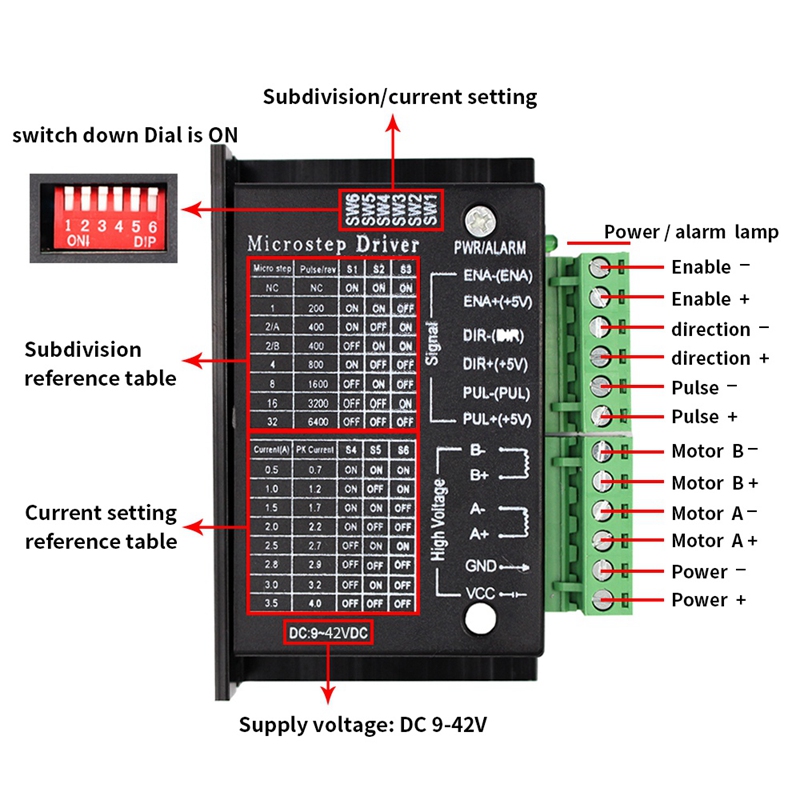 |
Диагностика неисправностей
|
Не горит индикатор питания
|
1) Нет питания
2) Низкое напряжение питания
|
1) Проверьте подключение к источнику питания
2) Увеличьте напряжение питания
|
|
Двигатель не вращается, нет удерживающего момента
|
1) Неправильное подключение двигателя
2) Нет разрешающего сигнала Enb
|
1) Правильно подключите двигатель
2) Инвертируйте сигнал Enable
|
|
Двигатель не вращается, есть удерживающий момент
|
Неверно подключен сигнал Step
|
Проверьте правильность подключения сигнала Step
|
|
Двигатель вращается в противоположном направлении
|
1) Неправильно подключена фаза ШД
2) Неверная полярность управляющего сигнала Dir
3) Установлен слишком низкий рабочий ток ШД
|
1) Поменяйте местами провода одной фазы ШД
2) Инвертируйте управляющий сигнал Dir
3) Правильно установите рабочий ток ШД
|
Данные микросхемы являются развитием ТВ6560 и допускают номинальный ток на выходе до 4.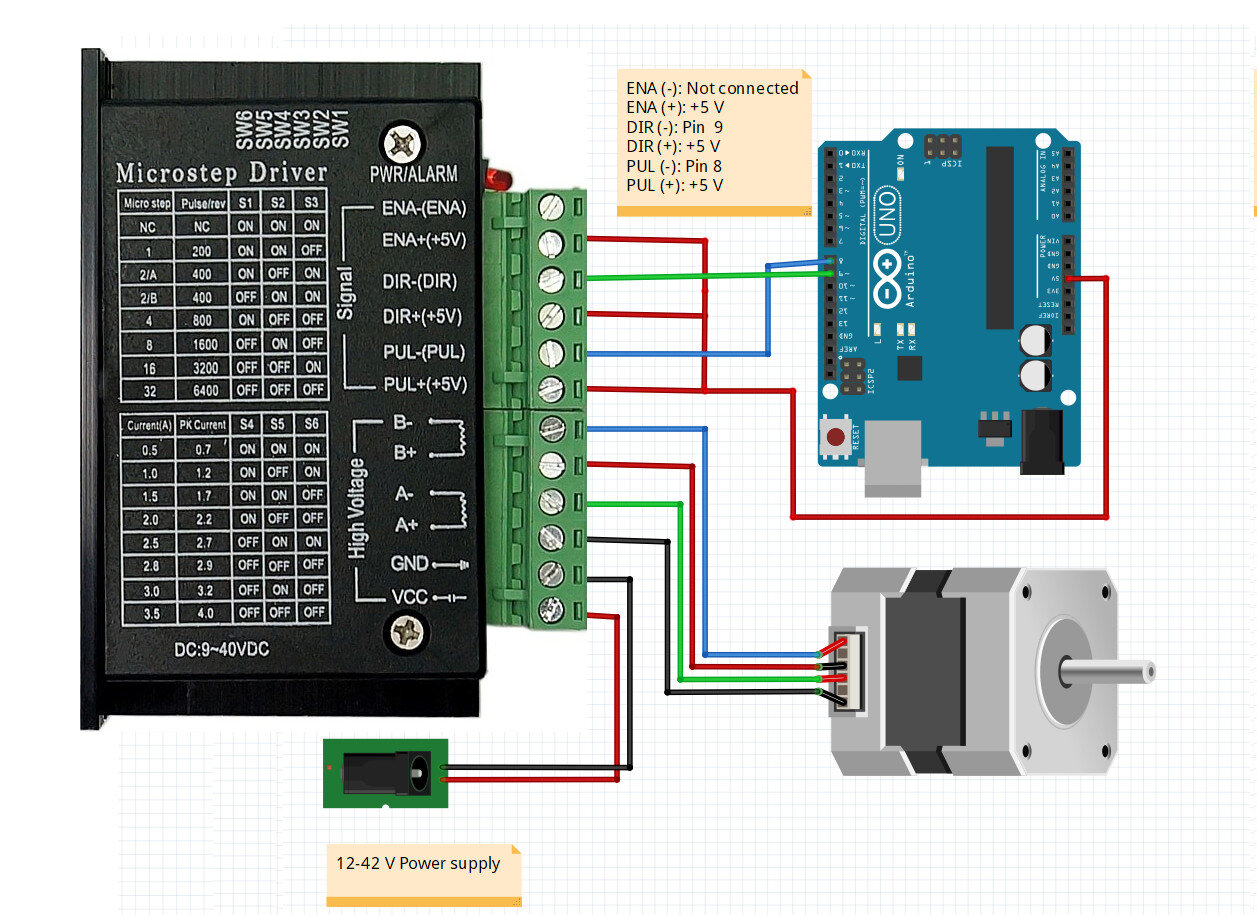 5А (кратковременно 5А), что позволяет применять более мощные шаговые двигатели. Помимо этих микросхем в схемотехнику данных контроллеров внесены и другие изменения — более быстрые оптопары, возможность дискретной настройки выходных токов и т.д. Их внешний вид:
5А (кратковременно 5А), что позволяет применять более мощные шаговые двигатели. Помимо этих микросхем в схемотехнику данных контроллеров внесены и другие изменения — более быстрые оптопары, возможность дискретной настройки выходных токов и т.д. Их внешний вид:
Иногда они выпускаются в металлическом кожухе, который выполняет для ТВ6600 роль радиатора. В этом случае на плате отсутствует локальный радиатор и прикрепленный на нем вентилятор обдува.
На плате также для каждой оси установлены переключатели шага и выходного тока:
Настройка шаговых двигателей осей.
В процессе настройки надо вычислить необходимое количество подаваемых импульсов (шагов) на шаговый двигатель для перемещения управляющей гайки червячной передачи станка на заданную единицу измерения — 1мм.
Например, имеем шаговый двигатель с шагом 1.8 градуса, червячную передачу с шагом резьбы 1.25мм и контроллер, установленный на “полный шаг”.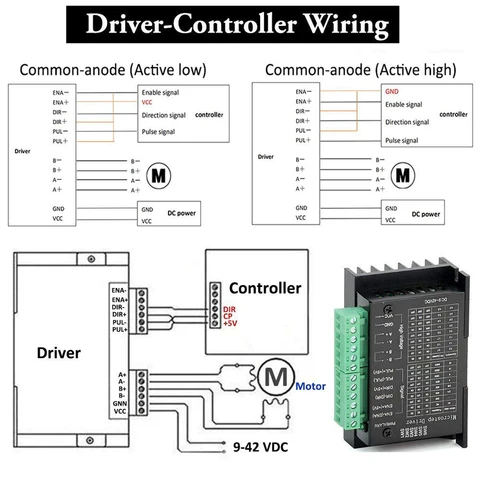 Тогда при подаче на него 200 импульсов (шагов), его вал повернется на (1.8градуса х 200) = 360 градусов (полный оборот) и управляющая гайка червячной передачи сдвинется на 1.25мм.
Тогда при подаче на него 200 импульсов (шагов), его вал повернется на (1.8градуса х 200) = 360 градусов (полный оборот) и управляющая гайка червячной передачи сдвинется на 1.25мм.
Теперь, чтобы гайка сдвинулась на 1мм, надо соответственно уменьшить количество подаваемых на шаговый двигатель импульсов (шагов), которые определяются по формуле: 200/ 1.25мм = 160 импульсов (шагов). Т.е. при 160 импульсах(шагах) управляющая гайка при резьбе с ходом 1.25мм переместится на 1мм.
Если на контроллере установлен неполный шаг, например «полшага», то формула будет иметь следующий вид: 2х200/1.25мм = 320 импульсов (шагов).
Таким образом, изменяя степень “шага” в контроллере, а также зная ход резьбы червячной передачи, по аналогичной формуле можно в дальнейшем рассчитывать количество подаваемых на шаговый двигатель импульсов (шагов) для перемещения управляющей гайки на 1мм.
Учитывая, что наиболее оптимальная работа данного контроллера отмечена при установке “1/8 шага”, возьмем за основу:
— шаг резьбы червячной передачи -1.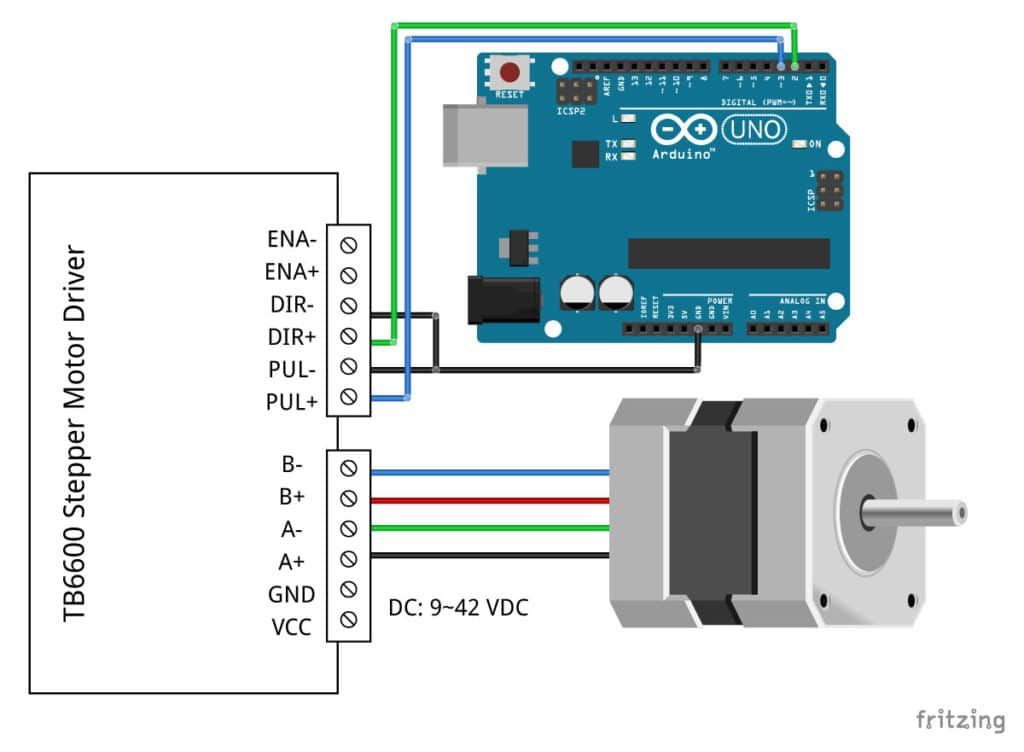 25мм;
25мм;
— контроллер установлен на “1/8 шаг”, т.е. 1мм перемещения управляющей гайки будет соответствовать 8х200/1.25мм=1280 импульсов(шагов) шагового двигателя.
Примечание: перед началом “пусков” шаговых двигателей при выключенном питании на всех 3-х синих переключателях контроллера на ТВ6600 установим:
|
Current Setting
(выходной ток)
| 1 | 2 | Decay Mode Settings | 3 | 4 | MicroStep Settings (шаг) | 5 | 6 |
| 100% | ON | ON | FAST | ON | ON | 1 | ON | ON |
| 75% | ON | OFF | 25% | ON | OFF | 1/2 | ON | OFF |
| 50% | OFF | ON | 50% | OFF | ON | 1/8 | OFF | OFF |
| 25% | OFF | OFF | SLOW | OFF | OFF | 1/16 | OFF | ON |
Требуемые установки выделены жирным текстом с подчеркиванием – OF .
Соответственно для контроллера на ТВ6600 джамперами установим: 1=OFF 2=ON 3=OFF 4=ON 5=OFF 6=ON (1/8шаг, 1.2А выходной ток на ШД).
В дальнейшем данные установки можно будет менять.
Module
TB6600 Драйвер шагового двигателя Arduino
Введение
Что такое шаговый двигатель?
Шаговый двигатель представляет собой бесщеточный электродвигатель постоянного тока, который делит полный оборот на несколько равных шагов. Затем можно задать положение двигателя для перемещения и удержания на одном из этих шагов.
Как управлять шаговым двигателем?
Быстрый способ управления шаговым двигателем — это использование драйвера (контроллера) шагового двигателя. И TB6600 arduino — это как раз то, что вам нужно.
TB6600 arduino — это простой в использовании профессиональный драйвер шагового двигателя, который может управлять двухфазным шаговым двигателем.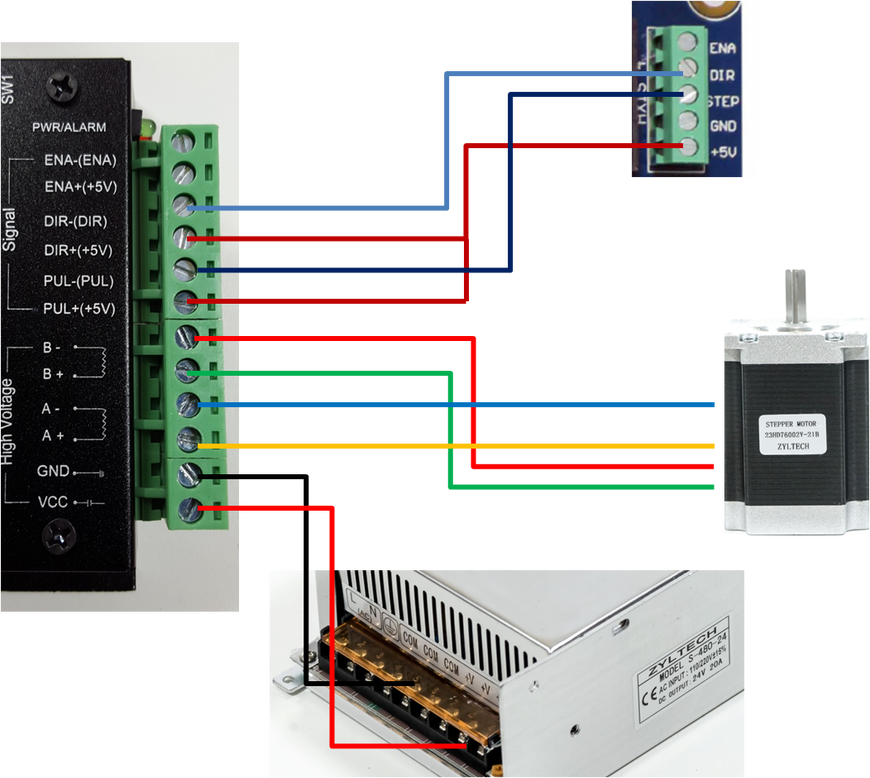 Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 arduino имеет широкий диапазон потребляемой мощности, источник питания 9 ~ 42 В постоянного тока. И он способен выдавать пиковый ток 4А, чего достаточно для большинства шаговых двигателей.
Он совместим с Arduino и другими микроконтроллерами, которые могут выводить цифровой импульсный сигнал 5 В. Драйвер шагового двигателя TB6600 arduino имеет широкий диапазон потребляемой мощности, источник питания 9 ~ 42 В постоянного тока. И он способен выдавать пиковый ток 4А, чего достаточно для большинства шаговых двигателей.
Драйвер шагового двигателя поддерживает управление скоростью и направлением. Вы можете установить его микрошаг и выходной ток с помощью 6 DIP-переключателей. Имеется 7 видов микрошагов (1, 2/A, 2/B, 4, 8, 16, 32) и 8 видов контроля тока (0,5А, 1А, 1,5А, 2А, 2,5А, 2,8А, 3,0А). А, 3,5А) всего. И все сигнальные клеммы используют высокоскоростную изоляцию оптопары, что повышает ее способность противостоять высокочастотным помехам.
Как профессиональное устройство, он может управлять двухфазным, четырехфазным гибридным шаговым двигателем типа 57, 42.
Примечание: это новейшая обновленная версия драйвера шагового двигателя TB6600.
DIY Alarm с использованием домашнего помощника, Konnected и Sonoff RF Bridge
 youtube.com/embed/rOxxGth3SnE»>
youtube.com/embed/rOxxGth3SnE»>
TB6600 5A Стальный двигатель и Arduino
Hardwares У вас были необходимы:
9004 9004 9004 9004 9004 9004 9004 9004 9004 9004 9004 9004 9004 9004
. текущий контроль
Спецификация
Проекты
Проект 1.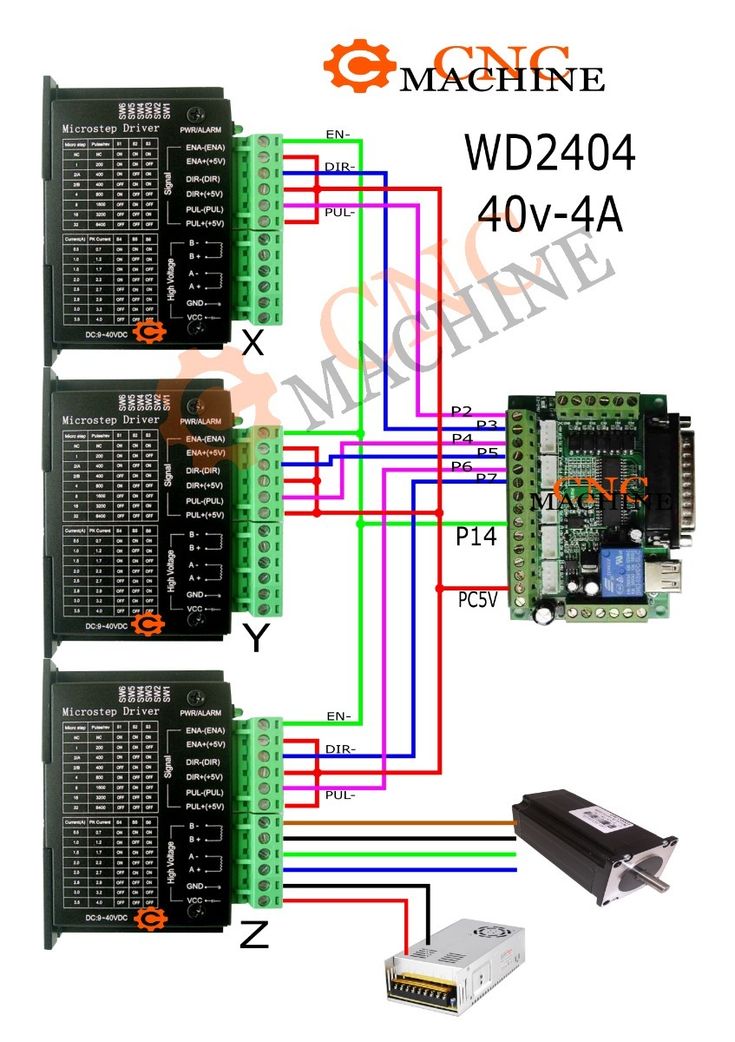 Шаговый двигатель Nema23 и Arduino TB6600 (Краткое руководство для начинающих)
Шаговый двигатель Nema23 и Arduino TB6600 (Краткое руководство для начинающих)
Проект 2. Arduino с библиотекой AccelStepper и TB6600 Cepper Motor Controller
. для просмотра комментариев с помощью Disqus.
Одноосный контроллер шагового двигателя с ЧПУ TB6600 — SainSmart.com
Торговая марка: SainSmart
Артикул: 101-60-197
[Снято с производства] Одноосевой контроллер шагового двигателя с ЧПУ, TB6600
Артикул: 101-60-197
7 отзывов
СКП: 6955170860005
Код продукта: 11091746708
Код варианта: 32856375230543
18,95 €
Шаговый драйвер TB6600 предлагает простое решение для создания вашего 3D-принтера и станка с ЧПУ.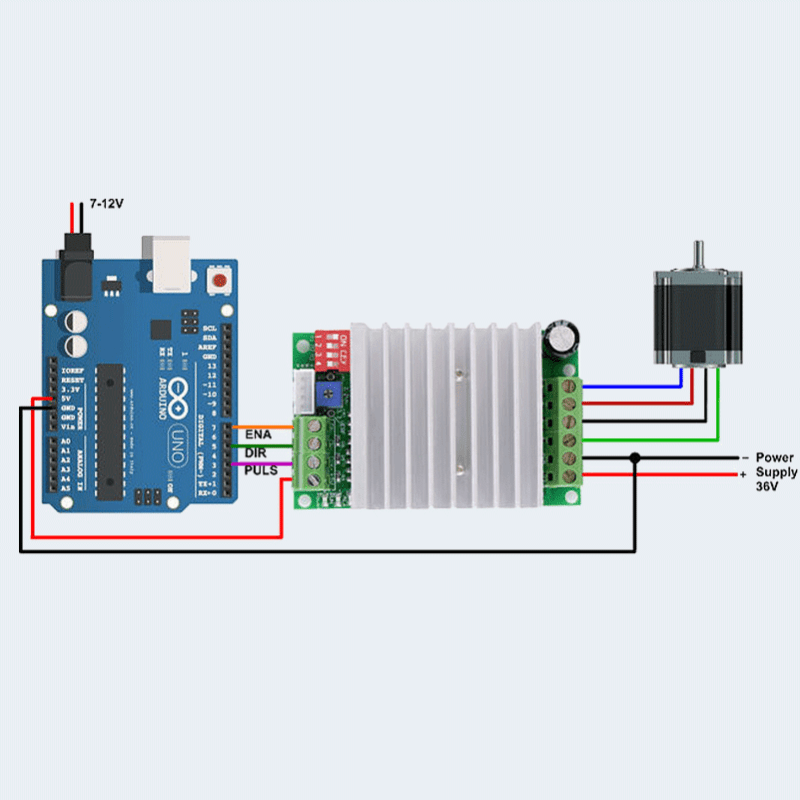 Его функция аналогична компьютерному хосту, и вы можете легко справиться с ним, подключив только несколько терминалов.
Его функция аналогична компьютерному хосту, и вы можете легко справиться с ним, подключив только несколько терминалов.
- Тип входа питания постоянного тока: 12–40 В
- Выходной ток: 0,6~4,5 А
- Микрошаг: 1, 2, 4, 8, 16
- Форма защиты: защита от перегрева, защита от перегрузки по току, защита от пониженного напряжения, предотвращение реверса
- Подключение источника питания
- Максимальная частота пульса 200 кГц
- Размеры: 118 мм * 87 мм * 35 мм 4,6 дюйма * 3,4 дюйма * 1,4 дюйма
- Вес: 253 г
- Рабочая среда: температура-15~50 ℃/ 5 ℉~122 ℉ Влажность <90%
США — продано
ЕС — продано
Великобритания — продано
Количество
Только 0 в наличии.
Похожие записи
-

 Pi 3: Купить Raspberry Pi 3 Model B в Москве / Амперка
Pi 3: Купить Raspberry Pi 3 Model B в Москве / Амперка - Delivery order перевод: DELIVERY ORDER перевод с английского на русский, translation English to Russian. Англо-Русский словарь Tiger
- Солнечная панель для зарядки аккумулятора: Солнечная батарея для зарядки аккумулятора 12в 90 Вт CHN90-36M (для лодки, катера, моторки) — купить в Солнечные.RU
- Трехкулачковый патрон proxxon 28941: Патрон PROXXON Micromot 28941