Пид регулятор это: ПИД регулятор
Содержание
Что такое ПИД-регулятор схема подключения
10.11.2022
Когда стоит менять проводку
Не стоит самостоятельно осуществлять замену проводки и устранять неисправности. Не стоит самостоятельно осуществлять замену.
05.11.2022
Зачем размещать слаботочное оборудование отдельно
Не стоит при выборе щитка стараться сэкономить и все оборудование размещать в одном корпусе.
10.09.2022
Как выбрать рубильник для ваших нужд
Это устройство должно отвечает за безопасность.
03.08.2022
Как выбрать частотный преобразователь
Расскажем об основных критериях правильного выбора частотника.
10.06.2022
В чем разница между устройством плавного пуска и частотным преобразователем?
Выясним основные отличия в нашей статье.
06.06.2022
Электрика на даче
В первую очередь важно уделять внимание заземлению и защите от молнии.
11.04.2022
Как расшифровать маркировку УДТ (УЗО)
Маркировка обязательно должна быть четкой и располагаться в видном месте.
11.04.2022
Что такое время расцепления?
Поскольку электроток проходит по замкнутому контуру, то для прекращения действия требуется разорвать цепь. Для этого используются специальные устройства.
11.03.2022
Преимущества частотных преобразователей
Какими достоинствами обладают частотные преобразователи и есть ли в них необходимость.
09.03.2022
Изоляция линий электропередачи
Разберемся в особенностях изоляторов электрических линий.
13.02.2022
Где установить распределительный щит в частном доме
Установка распределительного щита должна осуществляться в безопасном месте.
05.02.2022
Короткое замыкание
Рассмотрим подробнее, что такое короткое замыкание и по какой причине оно происходит.
13.01.2022
Способы соединения проводов
Качество электромонтажа зависит напрямую от соединений. Подробности в нашей новой статье:
04.12.2021
Особенности выполнения монтажа кабельных лотков
Основные правила грамотной и качественной установки лотка, соблюдать которые необходимо обязательно.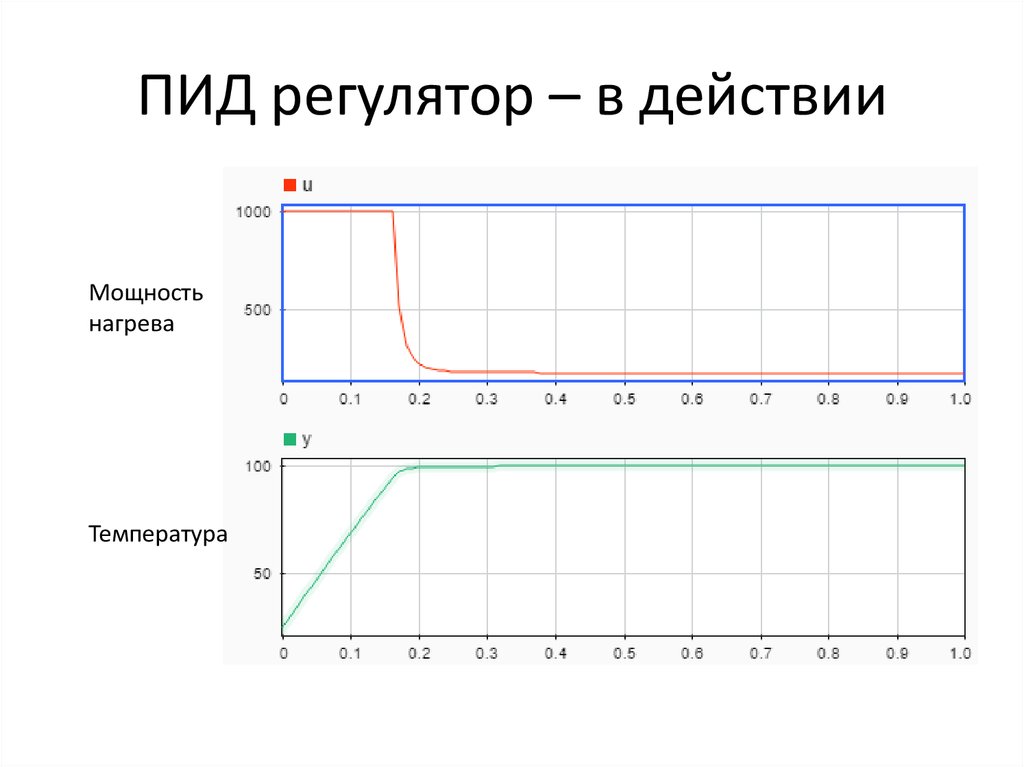
10.11.2021
Какой частотник лучше выбрать для работы с асинхронными двигателями
Перед выбором прибора учитывать нужно ряд характеристик. Рассмотрим самые популярные и востребованные.
05.11.2021
Почему выбивает автомат
Установка современных автоматических выключателей — ключевое требование правил устройства электроустановок.
10.08.2021
Что делать при скачках напряжения в электросети?
Расскажем о возможных причинах частых перепадов напряжения и способах как это устранить.
04.08.2021
Настройка частотного преобразователя Danfoss Micro Drive
Немного о параметрах настройки частотного преобразователя Danfoss Micro Drive.
06.07.2021
Потери при передаче электроэнергии
Почему возникают потери при передачи электроэнергии? — выясним в нашей статье!
03.07.2021
В чем разница между УЗО и дифавтоматом
Какие отличия между УЗО и дифавтоматом. Что лучше из них выбрать, чтобы обеспечить максимальную безопасность.
02.04.2021
Выбор характеристик при покупке автоматического выключателя
Разберемся какие типы характеристик при выборе автоматического выключателя лучше подойдут для ваших нужд.
07.02.2021
Подделка ABB. Какое различие с оригиналом?
Мы расскажем, как отличить автовыключатель ABB от подделки и где покупать качественные изделия.
07.02.2021
Применение УЗО для защиты людей от поражения электрическим током
Когда не стоит устанавливать защитное устройство, а когда это крайне необходимо? — выясним в нашей статье!
09.01.2021
Почему стоит использовать кабельные лотки
Кабельные лотки способны выдерживать высокую температуру и не деформироваться.
08.01.2021
Выбор автоматического выключателя
При выборе этого устройства обращают внимание на рабочее напряжение, полюсность, номинальный ток, ток короткого замыкания, класс срабатывания.
10.10.2020
Новая серия реле времени CT-C от ABB
Еще летом компания АВВ объявила о запуске продаж серии реле времени CT-C.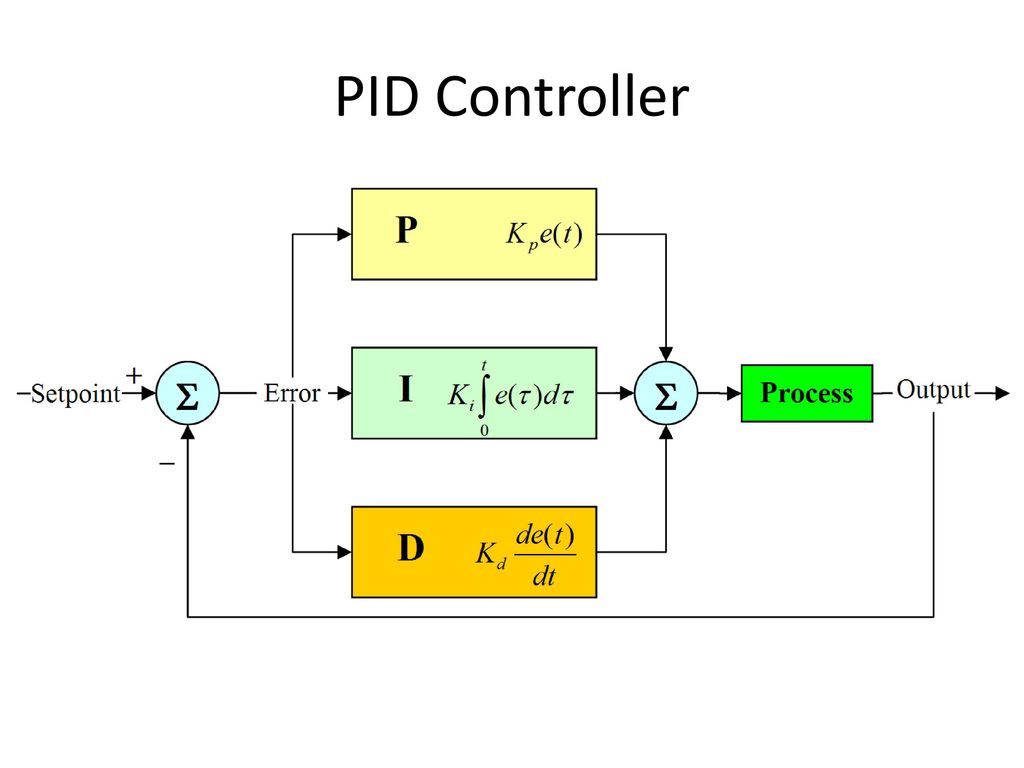
08.10.2020
Как испытывают двигатели АВВ для пищевой промышленности?
Сравнение двигателей из нержавеющей стали и алюминия
12.09.2020
Назначение электромагнитных пускателей
Для чего необходимы электромагнитные пускатели? Какие особенности они выполняют?
12.09.2020
На чём можно сэкономить при покупке электрощитового оборудования
На каких элементах электрощитового оборудования можно сэкономить и стоит ли это вообще делать?
18.09.2019
Система Умный дом ABB i-bus® EIB/KNX
СООО «ЕвроЭнергоСервис» предлагает комплексные решения для систем «интеллектуальных зданий» с установкой продуктов ABB/EIB, i-bus® и KNX/EIB. Под комплексным…
17.09.2019
Устройства серии System pro M compact от АВВ
«ЕвроЭнергоСервис» представляет большой выбор устройств серии System pro M compact концерна АВВ — новой разработки, главным преимуществом которой является…
16.09.2019
Ассортимент производства
Всем известна истина, которая гласит, что лучшее оборудование — это оборудование, о котором Вы просто забываете в процессе эксплуатации, которому требуется…
14. 09.2019
09.2019
Автоматические выключатели Emax
Серия автоматических выключателей SACE Emax состоит из пяти моделей, каждая из которых имеет взаимозаменяемые подвижные части (с различными номинальными…
12.09.2019
Референция
Исключительным опытом является ввод в эксплуатацию трансформаторов TRASFOR, установленных при наводнении в 2002 г. Это оборудование с обмотками ВН залитыми…
12.09.2019
Могло бы вас заинтересовать
Способ охлаждения обозначается знаком, который задает вид охлаждающего носителя, если его циркуляция естественная ( трубным ходом), или искусственная…
12.09.2019
Почему следует выбирать TRASFOR?
Трансформаторы и дроссели от TRASFOR -это: максимальная надежность; минимальные расходы; оборудование с низкими потерями, малым уровнем шума; минимальная…
12.09.2019
Автоматические выключатели SACE Tmax
Опыт концерна ABB в проектировании и производстве автоматических выключателей позволил сконструировать аппараты, которые создают возможность решения любых…
15. 08.2019
08.2019
Наши возможности
Производственный диапазон Trasfor
Принцип работы ПИД-регуляторов
MaxPlant
Принцип работы
Регуляторы процесса
Регуляторы процесса (Process Controllers) – это параметрируемые цифровые контроллеры со встроенным
набором стандартных функций для регулирования технологических переменных (температуры, давления и т.п.).
В качестве сигналов задания (Reference) могут использоваться как фиксированные уставки (Fixed Setpoints),
так и внешние (External).
Аналоговые входы используются для подключения датчиков обратной связи (термометров сопротивления, термопар,
манометров и т.п.).
Дискретные входы используются для задания фиксированных уставок и переключения между режимами.
Дискретные выходы используются для сигнализации: готовности, аварий, состояния.
Релейные выходы используются для дискретного управления, а аналоговые выходы – для непрерывного управления.
Дискретное управление
- 2-х позиционный регулятор использует только 2 состояния:
- включено (открыто)
- выключено (закрыто)
- 3-х позиционный регулятор использует 3 состояния:
- выключено
- вращение по часовой стрелке
- вращение против часовой стрелки (реверс)
- 5-и позиционный регулятор использует 5 состояний:
- выключено
- вращение на первой скорости по часовой стрелке
- вращение на второй скорости по часовой стрелке
- вращение на первой скорости против часовой стрелки
- вращение на второй скорости против часовой стрелки
Пример: управление нагреванием или охлаждением.
Пример: управление реверсивным электродвигателем.
Пример: управление 2-скоростным реверсивным двигателем.
Непрерывное управление
Для непрерывного управления используются ПИД-регуляторы.
Возможна реализация каскадного (подчинённого) управления.
Замкнутая система управления
Переходный процесс
Переходный процесс – это реакция системы на внешнее воздействие (задание, возмущение).
Неустойчивый (расходящийся) переходный процесс
Устойчивый (сходящийся) переходный процесс
| Колебательный | Апериодический | Монотонный |
ПИД-регулятор
С помощью настройки ПИД-регулятора (PID-controller) мы можем скорректировать переходный процесс так,
как нам нужно для решения своей задачи.
Хзад – заданное (желаемое) значение выходной переменной
Xmax – верхний допустимый предел выходной переменной
Xmin – нижний допустимый предел выходной переменной
Т – период колебаний
Тн – время нарастания
Тр – время переходного процесса (последняя точка пересечения кривой с Xmin или Xmax)
А1 – первое перерегулирование
А2 – второе перерегулирование
d=А1/A2 — степень (декремент) затухания переходного процесса (отношение первого перерегулирования ко второму)
Рассогласование, перерегулирование, время нарастания, время переходного процесса, степень
затухания характеризуют качество регулирования.
Пример
ПИД-регулятор открывает и закрывает регулирующий вентиль на горячей трубе так, чтобы из крана текла
вода с температурой +40°С с погрешностью плюс-минус 2 градуса.
Регулятор вычисляет рассогласование (ошибку) — отклонение реальной температуры (например, +20°С) от
заданного значения (+40°С) и решает – когда и насколько необходимо приоткрыть горячий вентиль,
чтобы температура повысилась на 20С.
Реальную (фактическую) температуру регулятор узнаёт с помощью датчика температуры (обратная связь),
а заданную температуру (уставку) ему сообщает оператор, например, набирая число «40» на своём ПК.
Чтобы настроить ПИД-регулятор, необходимо подобрать правильную комбинацию трёх коэффициентов:
- Пропорционального – Kp
- Интегрального – Ki
- Дифференциального – Kd
Могут использоваться и более простые — П и ПИ-регуляторы.
Формула ПИД-регулятора
где e(t) — ошибка (рассогласование), u(t) — выходной сигнал регулятора (управляющее воздействие).
Чем больше Пропорциональный коэффициент, тем выше быстродействие, но меньше запас устойчивости.
Но! простой П-регулятор не может полностью отработать рассогласование, т.е. всегда работает с ошибкой.
ПИ-регулятор позволяет избавиться от статической (установившейся) ошибки, но, чем больше Интегральный коэффициент,
тем больше перерегулирование (динамическая ошибка).
ПИД-регулятор позволяет нам уменьшить перерегулирование, но, чем больше Дифференциальный коэффициент,
тем больше погрешность из-за влияния шумов.
Если шумы идут по каналу обратной связи, то мы можем их отфильтровать с помощью фильтра низкой частоты,
но чем больше постоянная этого фильтра, тем медленнее регулятор будет отрабатывать возмущения.
Настройка ПИД-регулятора по методу Циглера-Николса
Циглер и Николс предложили свой вариант быстрой настройки ПИД-регулятора для периодического переходного процесса,
в котором затухание примерно равно 4.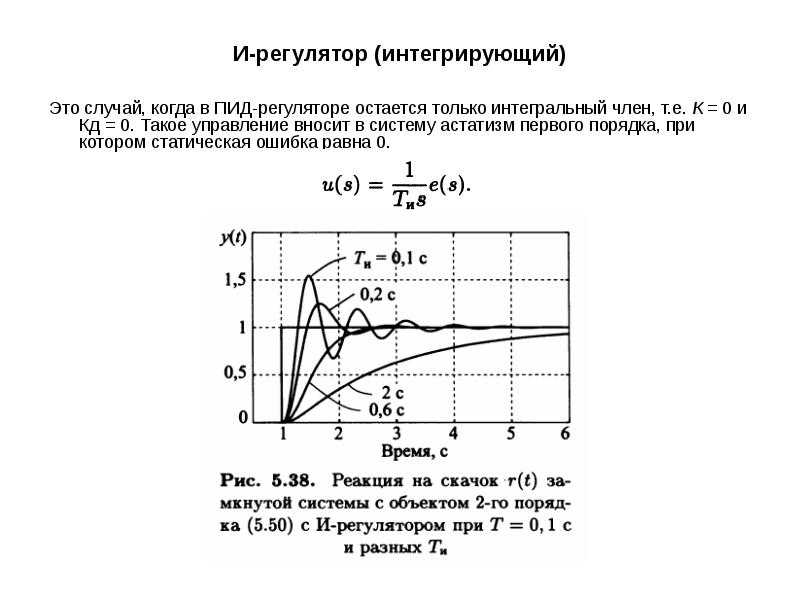
- Обнуляем Ki и Kd
- Постепенно увеличиваем Kp до критического значения Kc, при котором возникают автоколебания
- Измеряем период автоколебаний Т
- Вычисляем значения Kp, Ki и Kd по разным формулам для разных регуляторов:
- для П-регулятора: Kp=0,50*Kc
- для ПИ-регулятора: Kp=0,45*Kc, Ki=1,2*Kp/T
- для ПИД-регулятора: Kp=0,60*Kc, Ki=2,0*Kp/T,
Kd=Kp*T/8
Каскадный регулятор (подчинённое управление)
Продолжение примера
Теперь нам захотелось добавить комфорта и сделать так, чтобы уставка задания температуры воды менялась
в зависимости от температуры воздуха на улице (на улице мороз – вода горячая, на улице жара – вода прохладная).
Можно установить ещё один регулятор комфортной температуры, который по показаниям термометра узнаёт
фактическую температура наружного воздуха и решает, что комфортная температура воды должна быть, например, +40°С,
поэтому он выдаёт задание регулятору температуры воды – поддерживать температуру на уровне +40С (см.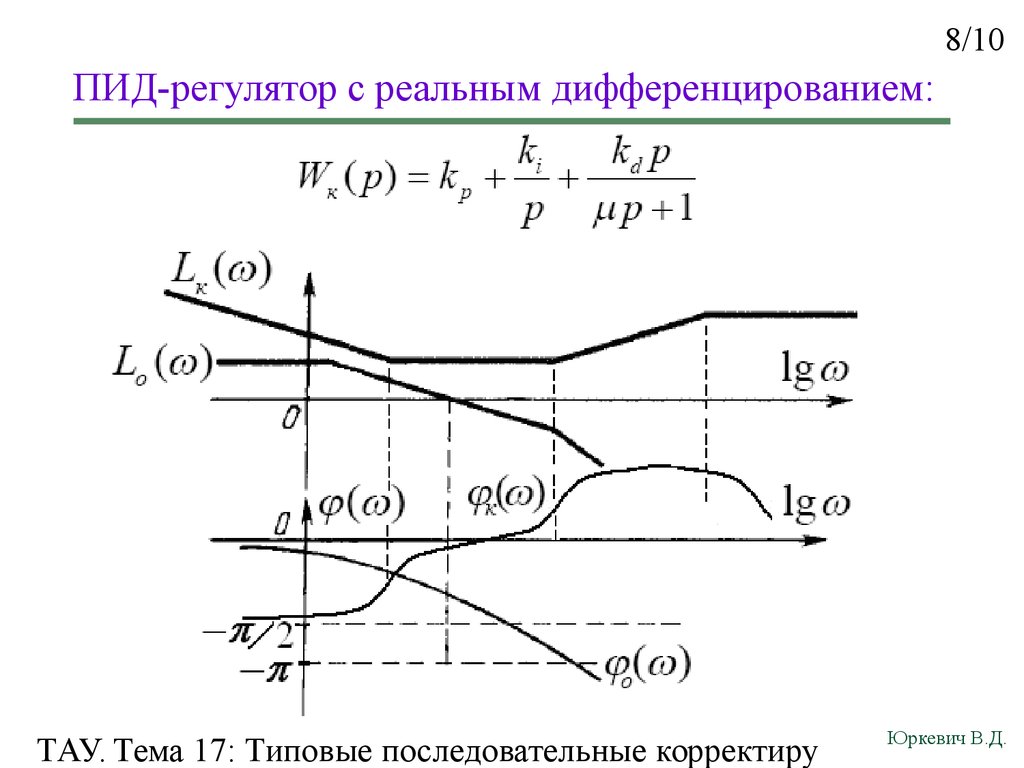 пример выше).
пример выше).
Здесь мы имеем каскадное регулирование: контур регулирования температуры воды подчинён контуру регулирования
комфортной температуры воды.
С помощью регуляторов процесса мы можем реализовать и более сложные связи.
Например, поддерживать постоянный расход и температуру воды, независимо от давления и температуры
горячего и холодного трубопроводов.
Упреждающее регулирование (Feedforward Control)
Не всегда простой ПИД-регулятор в системе с обратной связью может обеспечить требуемое быстродействие
из-за возникновения нежелательных колебаний или недопустимо большого перерегулирования.
Для улучшения характеристик регулирования применяют комбинированное управление – с обратной связью
(closed-loop) и без обратной связи (open-loop). К управляющему воздействию (выходу регулятора)
добавляется сигнал упреждающего воздействия, который не зависит от рассогласования, а значит,
не может вызвать автоколебания в системе.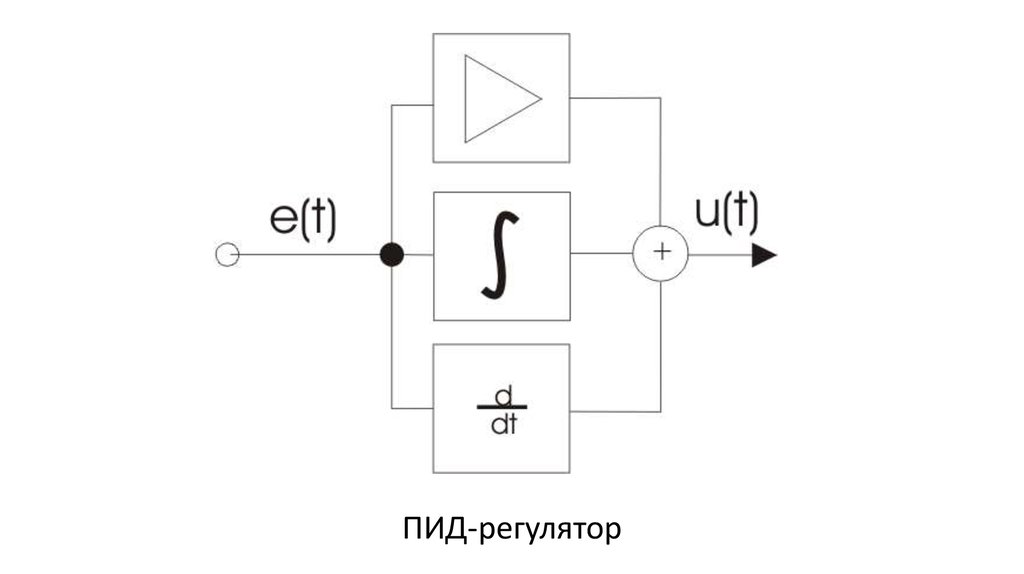
Продолжение примера
Если мы доверяем прогнозу погоды, то вместо каскадного управления мы можем реализовать упреждающее
регулирование без измерения уличной температуры: читаем прогноз на завтра, задаём уставку +40°С по таймеру времени
на завтра на 7 утра.
Если измерить возмущение, то можно подать упреждающее воздействие, которое компенсирует влияние
этого возмущения на процесс до того, как начнёт изменяться регулируемый параметр.
Как выбрать
Окружающая среда
- Температура
- Влажность
- Класс взрывозащиты
- Степень защиты корпуса.
Регулирование
- Тип регулятора
- Дискретный
- 2-х позиционный
- 3-х позиционный
- Непрерывный
- П-регулятор
- ПИ-регулятор
- ПИД-регулятор.
- Дополнительные функции:
- Каскадный регулятор (подчинённое управление)
- Упреждающее регулирование (Feedforward Control).

- Количество контуров регулирования.
Коммуникационный интерфейс
- HART
- FOUNDATION Fieldbus
- PROFIBUS PA.
Производители систем ЧПУ и промышленных роботов
Системы ЧПУ
Объяснение ПИД-регулятора
— RealPars
В этой статье мы поговорим о ПИД-регуляторе и его преобразовании из одностанционного устройства в то, во что оно превратилось сегодня.
Мы собираемся объяснить, почему ПИД-регуляторы используются в промышленных процессах вместо простых контроллеров ВКЛ/ВЫКЛ.
Мы покажем, как настройки контроллера, называемые пропорциональным, интегральным и производным, влияют на различные процессы, находящиеся под контролем.
Мы также предоставим обзор очень важного действия под названием «Настройка контроллера».
Простой пример
Давайте начнем с обсуждения управления температурой в доме, поскольку оно знакомо многим людям.
В этом доме есть печь, которая распределяет тепло по всему дому, и настенный контроллер, называемый термостатом.
Термостат оснащен датчиком, который измеряет температуру в помещении и сравнивает это измерение с регулируемой уставкой.
Если температура в помещении ниже уставки, печь включается.
Когда температура в помещении поднимается выше заданного значения, печь выключается. Этот тип управления называется ON/OFF или Bang-Bang Control.
Ниже приведен график изменения комнатной температуры в зависимости от периода времени, когда печь включается и выключается.
Как видите, температура не держится точно на заданном значении 70°F, а циклически поднимается и опускается.
Управление ВКЛ/ВЫКЛ может подойти для вашего дома, но не подходит для промышленных процессов или управления движением.
Промышленный пример
Давайте рассмотрим пример контроля уровня в резервуаре, чтобы объяснить почему. Клапан наполняет бак, когда насос его опорожняет. Если клапан работает с управлением ВКЛ/ВЫКЛ, вода будет колебаться около уставки 50%.
Предположим, что отклонение составляет ±10%. В большинстве промышленных применений такое колебание уставки неприемлемо.
Хорошо, а что, если клапан можно задушить и поставить в любое положение между ВКЛ и ВЫКЛ?
ПИД-регулятор
Теперь мы можем перейти к разговору о ПИД-регуляторе. P означает пропорциональную, I — интегральную, D — производную.
Поскольку каждый процесс реагирует по-разному, ПИД-регулятор определяет, насколько и как быстро применяется коррекция, используя различные количества действий Пропорциональная , Интегральная и Производная .
Каждый блок вносит уникальный сигнал, который суммируется для создания выходного сигнала контроллера.
Контур управления с обратной связью
Давайте посмотрим, как ПИД-регулятор вписывается в контур управления с обратной связью. Контролер отвечает за то, чтобы Процесс оставался как можно ближе к желаемому значению, независимо от различных сбоев.
Контроллер сравнивает сигнал переменной процесса преобразователя (PV) и заданное значение.
На основе этого сравнения контроллер формирует выходной сигнал для управления исполнительным элементом. Этот выходной сигнал ПИД-регулятора может управлять конечным элементом управления во всем 100% диапазоне.
Логический блок ПИД-регулятора
Большинство современных ПИД-регуляторов являются частью ПЛК или РСУ и создаются в логике управления программой с помощью команд блока.
Автономный ПИД-регулятор
До появления ПЛК ПИД-регулятор был автономным устройством, отвечающим за управление одним контуром.
Параметры ПИД-регулятора
Диспетчерская может иметь десятки или сотни автономных контроллеров, установленных на панели.
В настоящее время все еще производится и используется много автономных ПИД-регуляторов.
Хорошо, давайте вернемся и поговорим о том, что делает каждый из компонентов P , I и D ПИД-регулятора.
Помните, ранее мы говорили, что ПИД-регулятор отвечает за то, чтобы процесс оставался как можно ближе к заданному значению, независимо от различных сбоев.
Давайте будем называть разницу между переменной процесса и заданным значением сигналом ошибки.
1) Пропорциональный блок
Пропорциональный блок создает выходной сигнал, пропорциональный величине сигнала ошибки.
К сожалению, чем ближе вы подходите к уставке, тем меньше она давит. В конце концов, процесс просто постоянно работает близко к заданному значению, но не совсем там.
Вот когда в дело вступает интеграл.0014 продолжительность и амплитуда сигнала ошибки.
Чем длиннее ошибка и больше сумма, тем больше интегральный выход.
Пока существует ошибка, интегральное действие будет продолжаться.
3) Блок производных
Блок производных создает выходной сигнал, пропорциональный скорости изменения сигнала ошибки.
Чем быстрее изменяется ошибка, тем больше выходная производная.
Производное управление заглядывает вперед , чтобы увидеть, какой будет ошибка в будущем, и соответственно вносит свой вклад в выходной сигнал контроллера. Это подводит нас к термину под названием Настройка контроллера .
Настройка контроллера
Ранее мы говорили, что каждый процесс реагирует по-разному и что ПИД-регулятор определяет, насколько и как быстро применяется коррекция, регулируя пропорциональное, интегральное и производное действие.
Настройка контроллера включает правильную настройку контроллера P , I и D значения для конкретных требований процесса. Интересно, что правильные настройки, достигнутые с помощью настройки контроллера, могут сильно различаться между процессами из-за специфических требований.
Например, после настройки контроллера скачок заданного значения на один процент в регуляторе уровня в резервуаре вызывает четвертьволновую затухающую реакцию.
Этот тип ответа может быть подходящим для процесса на уровне резервуара, но может иметь катастрофические последствия в процессе управления движением.
Методы настройки контроллера
Существует множество различных ручных методов настройки контроллера, которые включают наблюдение за реакцией процесса после изменения уставки контроллера.
Один метод включает в себя увеличение степени изменения уставки и повторение процедуры до тех пор, пока процесс не войдет в состояние установившихся колебаний.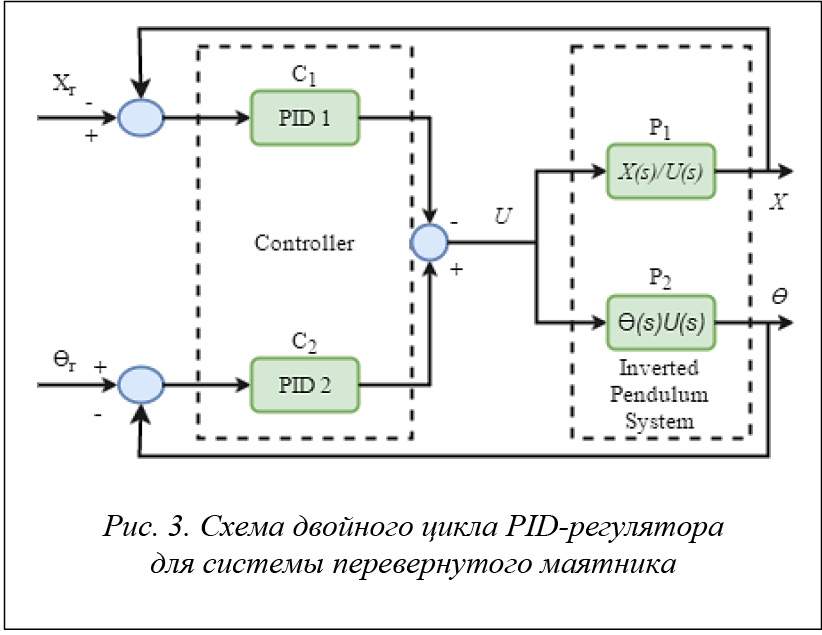
Этот метод настройки дает адекватные результаты, но часто непрактичен во многих приложениях. Например, насколько практично заставить уровень жидкости в большом резервуаре достигать установившихся колебаний?
Большинство продаваемых сегодня контроллеров процессов, ПЛК и контроллеров контуров РСУ имеют функцию автонастройки.
ПИД-регулятор изучает как процесс реагирует на изменение уставки и предлагаемые настройки ПИД-регулятора.
Независимо от того, получены ли исходные параметры ПИД-регулятора с помощью методов ручной или автоматической настройки, опытным специалистам по автоматизации часто требуется дополнительная настройка для получения желаемого отклика.
Если вы хотите узнать больше о ПИД-регулировании, вы можете ознакомиться с двумя другими нашими статьями:
– Что такое параметры настройки ПИД-регулятора?
– Настройка ПИД-регулятора | Как настроить ПИД-регулятор
Резюме
Хорошо,… давайте рассмотрим:
— Контроллер ВКЛ/ВЫКЛ или релейный регулятор имеет только два выходных состояния и резко переключается между этими двумя состояниями.
– В ПИД-регуляторе P обозначает пропорциональный, I обозначает интегральный, а D обозначает производный.
ПИД-регулятор отвечает за то, чтобы процесс оставался как можно ближе к желаемому значению, независимо от различных сбоев.
— ПИД-регулятор определяет, насколько и как быстро применяется коррекция, используя различные количества P-, I- и D-действий.
– Пропорциональный блок создает выходной сигнал, пропорциональный величине Сигнала ошибки.
– Интегральный блок создает выходной сигнал, пропорциональный длительности и величине сигнала ошибки.
– Блок производных формирует выходной сигнал, пропорциональный скорости изменения сигнала ошибки.
– Настройка контроллера включает в себя правильную настройку значений P, I и D контроллера для конкретных требований процесса либо вручную, либо автоматически.
Если у вас есть какие-либо вопросы о ПИД-регуляторе или настройке ПИД-регулятора, задайте их в комментариях ниже, и мы свяжемся с вами менее чем через 24 часа.
У вас есть друг, клиент или коллега, которым может пригодиться эта информация? Пожалуйста, поделитесь этой статьей.
Что такое ПИД-регулятор? Типы, работа и применение
ПИД-регулятор — это наиболее распространенный алгоритм управления, используемый в промышленной автоматизации и приложениях, и более 95% промышленных контроллеров относятся к типу ПИД. ПИД-регуляторы используются для более точного и точного управления различными параметрами.
Чаще всего они используются для регулирования температуры, давления, скорости, расхода и других параметров процесса. Благодаря высокой производительности и функциональной простоте они были приняты в огромных промышленных приложениях, где более точное управление является первоочередным требованием. Давайте посмотрим , как работает ПИД-регулятор ?
- Сообщение по теме: Что такое распределенная система управления (DCS)?
Содержание
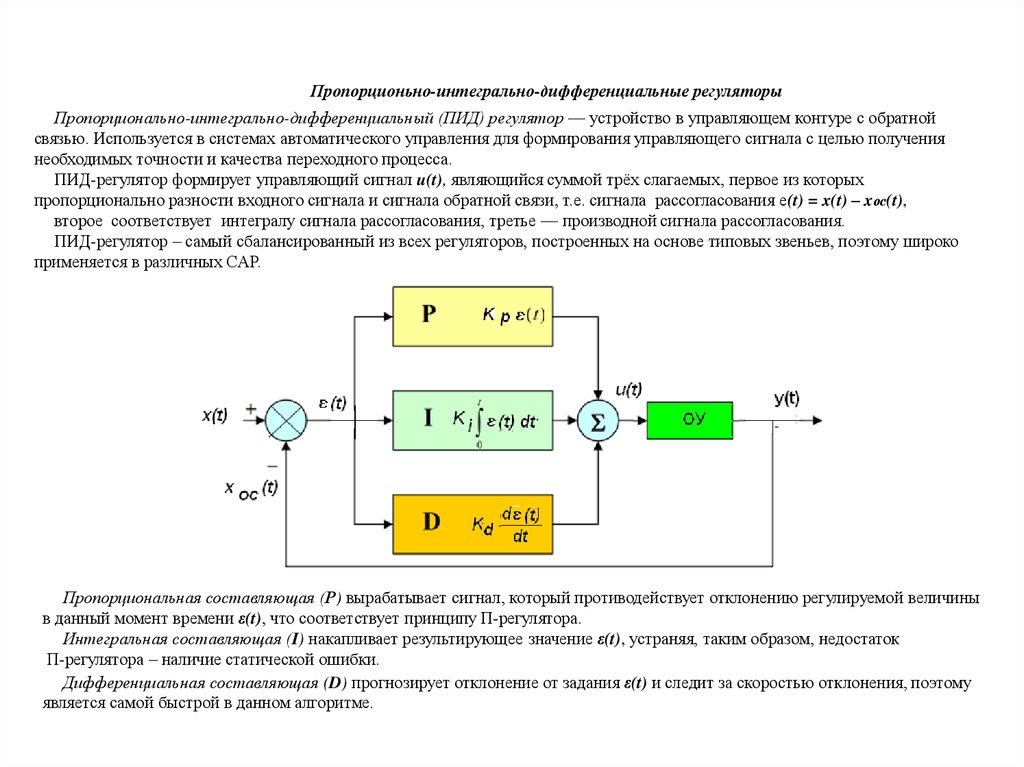
Что такое ПИД-регулятор?
Комбинация пропорционального, интегрального и дифференциального воздействий чаще называется ПИД-регулированием, отсюда и название: ПИД-регулятор (Пропорционально-интегрально-дифференциальный) Контроллер .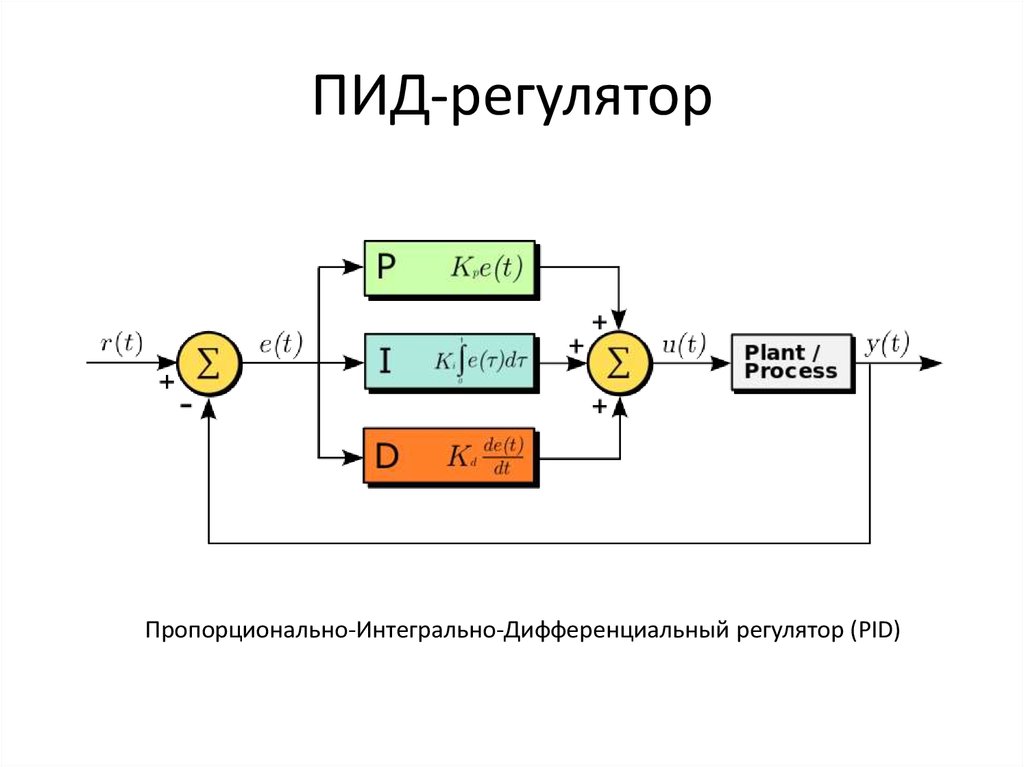 Эти три основных коэффициента варьируются в каждом ПИД-регуляторе для конкретного приложения, чтобы получить оптимальную реакцию.
Эти три основных коэффициента варьируются в каждом ПИД-регуляторе для конкретного приложения, чтобы получить оптимальную реакцию.
Получает входной параметр от датчика, который называется фактической переменной процесса. Он также принимает требуемый выходной сигнал привода, который называется установленной переменной, а затем вычисляет и объединяет пропорциональные, интегральные и производные характеристики для вычисления выходного сигнала привода.
Рассмотрим типичную систему управления, показанную на рисунке выше, в которой переменная процесса должна поддерживаться на определенном уровне. Предположим, что переменной процесса является температура (в градусах Цельсия). Для измерения переменной процесса (т. е. температуры) используется датчик (скажем, RTD).
Уставка – это желаемая реакция процесса. Предположим, что процесс должен поддерживаться при температуре 80 градусов по Цельсию, и тогда уставка равна 80 градусам по Цельсию. Предположим, что измеренная датчиком температура составляет 50 градусов по Цельсию (что является не чем иным, как переменной процесса), но уставка температуры составляет 80 градусов по Цельсию.
Это отклонение фактического значения от желаемого в алгоритме ПИД-регулирования приводит к тому, что выходной сигнал на привод (здесь это нагреватель) подается в зависимости от комбинации пропорционального, интегрального и производного откликов. Таким образом, ПИД-регулятор непрерывно изменяет выходной сигнал привода до тех пор, пока переменная процесса не установится на заданное значение. Это также называется системой управления с обратной связью с обратной связью .
Связанный пост:
- Что такое привод переменного тока? Работа и типы электрических приводов и ЧРП
- Что такое привод постоянного тока? Эксплуатация и классификация приводов постоянного тока
Работа ПИД-регулятора
При ручном управлении оператор может периодически считывать переменную процесса (которая должна контролироваться, например, температура, расход, скорость и т.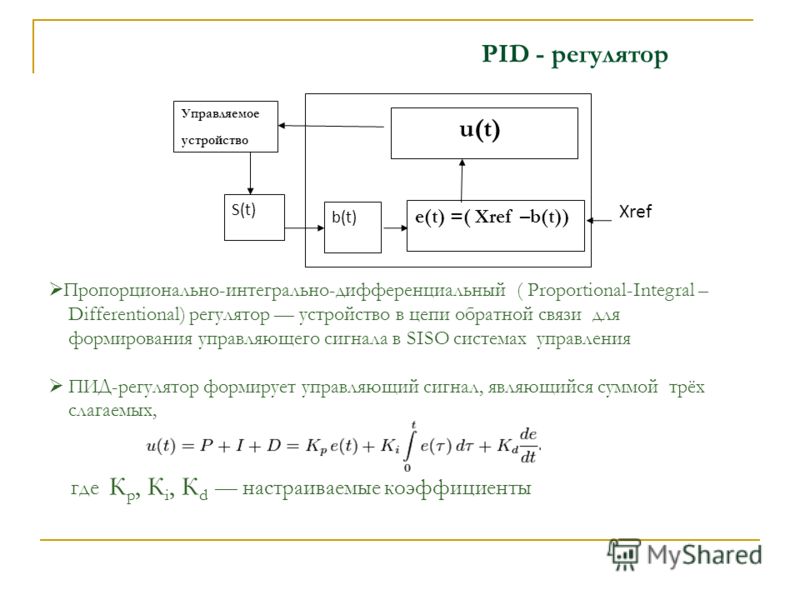 д.) и настраивать регулируемую переменную (которой нужно управлять чтобы довести регулируемую переменную до заданных пределов, таких как нагревательный элемент, проточные клапаны, мощность двигателя и т. д.). С другой стороны, при автоматическом контроле измерения и регулировка выполняются автоматически на постоянной основе.
д.) и настраивать регулируемую переменную (которой нужно управлять чтобы довести регулируемую переменную до заданных пределов, таких как нагревательный элемент, проточные клапаны, мощность двигателя и т. д.). С другой стороны, при автоматическом контроле измерения и регулировка выполняются автоматически на постоянной основе.
Все современные промышленные контроллеры относятся к автоматическому типу (или контроллерам с замкнутым контуром), которые обычно предназначены для выполнения одного или нескольких управляющих воздействий. Эти управляющие действия включают
- Контроллер ВКЛ-ВЫКЛ
- Пропорциональный контроллер
- Пропорционально-интегральный регулятор
- Пропорционально-дифференциальный регулятор
- Пропорционально-интегрально-дифференциальный регулятор
В случае контроллера ВКЛ-ВЫКЛ возможны два состояния для управления управляемой переменной, т. е. либо полностью ВКЛ (когда переменная процесса ниже уставки), либо полностью ВЫКЛ (когда переменная процесса выше уставки). Таким образом, выход будет носить колебательный характер. Для достижения точного управления в большинстве отраслей промышленности используется ПИД-регулятор (, PI или PD в зависимости от применения). Рассмотрим эти управляющие действия.
е. либо полностью ВКЛ (когда переменная процесса ниже уставки), либо полностью ВЫКЛ (когда переменная процесса выше уставки). Таким образом, выход будет носить колебательный характер. Для достижения точного управления в большинстве отраслей промышленности используется ПИД-регулятор (, PI или PD в зависимости от применения). Рассмотрим эти управляющие действия.
Похожие сообщения:
- Системы SCADA для распределения электроэнергии
- Программируемые логические контроллеры (ПЛК) для промышленного управления
П-регулятор
Пропорциональное управление или просто П-регулятор выдает управляющий выход, пропорциональный текущей ошибке. Здесь ошибка — это разница между заданным значением и переменной процесса (т. е. e = SP — PV). Это значение ошибки, умноженное на пропорциональный коэффициент усиления (Kc), определяет выходной отклик, или, другими словами, пропорциональный коэффициент определяет отношение пропорционального выходного отклика к значению ошибки.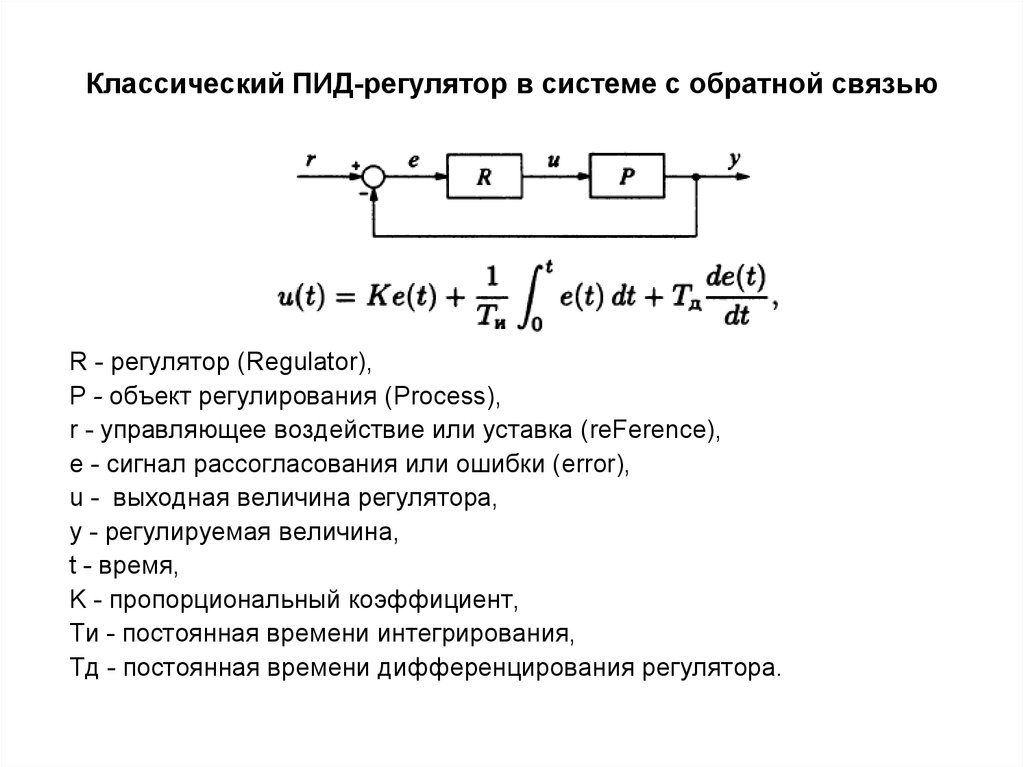
Например, величина ошибки равна 20, а Kc равна 4, тогда пропорциональная реакция будет равна 80. Если значение ошибки равно нулю, выход или реакция контроллера будут равны нулю. Скорость реакции (переходная характеристика) увеличивается за счет увеличения значения пропорционального усиления Kc. Однако, если Kc увеличивается за пределы нормального диапазона, переменная процесса начинает колебаться с большей скоростью, что вызывает нестабильность системы. Хотя П-регулятор обеспечивает стабильность переменной процесса с хорошей скоростью отклика, всегда будет ошибка. между заданным значением и фактической переменной процесса. В большинстве случаев этот контроллер снабжен ручным сбросом или смещением, чтобы уменьшить ошибку при отдельном использовании. Однако этот контроллер не может обеспечить нулевое состояние ошибки. Следовательно, в отклике п-регулятора всегда будет устойчивая ошибка, как показано на рисунке.
Похожие сообщения:
- Что такое промышленная автоматизация | Типы промышленной автоматизации
- Система автоматизации умного дома – схема и исходный код
I-контроллер
- Встроенный контроллер или I-контроллер в основном используется для уменьшения установившейся ошибки системы. Интегральная составляющая интегрирует член ошибки за период времени, пока ошибка не станет равной нулю. Это приводит к тому, что даже небольшое значение ошибки приводит к высокой интегральной характеристике. В состоянии нулевой ошибки он удерживает выход конечного устройства управления на последнем значении, чтобы поддерживать нулевую установившуюся ошибку, но в случае П-регулятора выход равен нулю, когда ошибка равна нулю.
 Интегральная составляющая интегрирует член ошибки за период времени, пока ошибка не станет равной нулю. Это приводит к тому, что даже небольшое значение ошибки приводит к высокой интегральной характеристике. В состоянии нулевой ошибки он удерживает выход конечного устройства управления на последнем значении, чтобы поддерживать нулевую установившуюся ошибку, но в случае П-регулятора выход равен нулю, когда ошибка равна нулю.
Интегральная составляющая интегрирует член ошибки за период времени, пока ошибка не станет равной нулю. Это приводит к тому, что даже небольшое значение ошибки приводит к высокой интегральной характеристике. В состоянии нулевой ошибки он удерживает выход конечного устройства управления на последнем значении, чтобы поддерживать нулевую установившуюся ошибку, но в случае П-регулятора выход равен нулю, когда ошибка равна нулю.Если ошибка отрицательна, интегральная характеристика или выход будут уменьшены. Скорость реакции медленная (означает, что реакция медленная), когда используется только I-регулятор, но улучшает реакцию в установившемся режиме. При уменьшении интегрального усиления Ki скорость отклика увеличивается.
Для многих применений пропорциональное и интегральное управление комбинируются для достижения хорошей скорости отклика (в случае П-регулятора) и лучшего отклика в установившемся режиме (в случае И-регулятора). Чаще всего ПИ-регуляторы используются в промышленной эксплуатации для улучшения переходных и установившихся характеристик.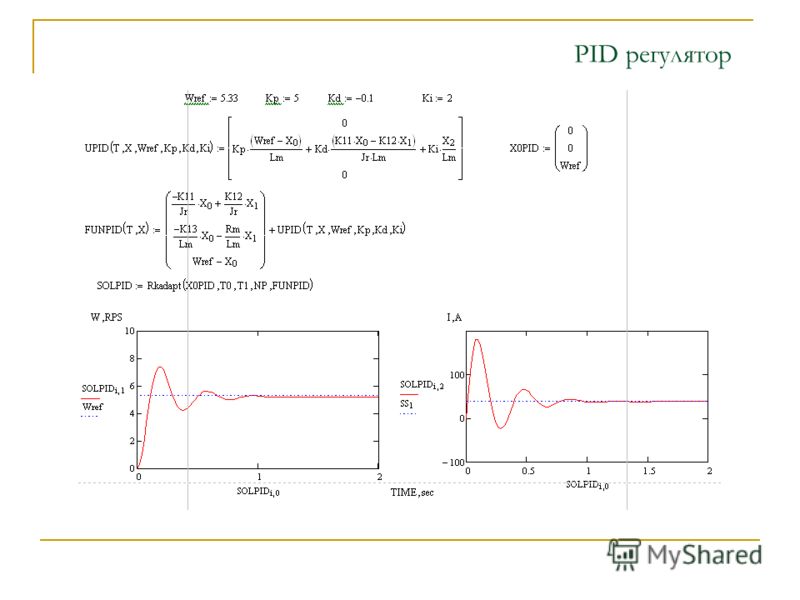 Реакции только I-контроля, только p-контроля и PI-контроля показаны на рисунке ниже.
Реакции только I-контроля, только p-контроля и PI-контроля показаны на рисунке ниже.
Похожие сообщения:
- Что такое датчик? Различные типы датчиков с приложениями
- Что такое преобразователь? Типы датчиков и области применения
Ответ D-контроллера
Производный контроллер ( или просто D-контроллер) видит, насколько быстро переменная процесса изменяется в единицу времени, и производит выходной сигнал, пропорциональный скорости изменения. Выходная производная равна скорости изменения ошибки, умноженной на константу производной. D-контроллер используется, когда переменная процессора начинает изменяться с высокой скоростью.
В таком случае D-контроллер перемещает окончательное управляющее устройство (такое как регулирующие клапаны или двигатель) в таком направлении, чтобы противодействовать быстрому изменению переменной процесса. Следует отметить, что D-контроллер сам по себе не может использоваться ни для каких приложений управления.
Следует отметить, что D-контроллер сам по себе не может использоваться ни для каких приложений управления.
Действие производной увеличивает скорость отклика, так как оно запускает выходной сигнал, таким образом предвосхищая поведение ошибки в будущем. Более быстро D-регулятор реагирует на изменение переменной процесса, если член производной велик (что достигается увеличением постоянной производной или времени Td).
В большинстве ПИД-регуляторов отклик D-регулятора зависит только от переменной процесса, а не от ошибки. Это позволяет избежать всплесков производительности (или резкого увеличения производительности) в случае внезапного изменения уставки оператором. Кроме того, в большинстве систем управления используется меньшее время производной td, поскольку отклик производной очень чувствителен к шуму в переменной процесса, что приводит к получению чрезвычайно высокого выходного сигнала даже при небольшом уровне шума.
Таким образом, путем комбинирования пропорциональной, интегральной и производной характеристик регулирования формируется ПИД-регулятор. ПИД-регулятор находит универсальное применение; однако необходимо знать настройки ПИД-регулятора и правильно настраивать его, чтобы получить желаемый выходной сигнал. Под настройкой понимается процесс получения идеального отклика ПИД-регулятора путем установки оптимальных коэффициентов усиления пропорциональных, интегральных и производных параметров.
ПИД-регулятор находит универсальное применение; однако необходимо знать настройки ПИД-регулятора и правильно настраивать его, чтобы получить желаемый выходной сигнал. Под настройкой понимается процесс получения идеального отклика ПИД-регулятора путем установки оптимальных коэффициентов усиления пропорциональных, интегральных и производных параметров.
Существуют различные методы настройки ПИД-регулятора для получения желаемого отклика. Некоторые из этих методов включают метод проб и ошибок, метод кривой реакции процесса и метод Зейглера-Николса. Чаще всего используются методы Зейглера-Николса и метод проб и ошибок.
Это о ПИД-регуляторе и его работе. Благодаря простоте структуры регулятора ПИД-регуляторы применимы для множества процессов. А также его можно настроить на любой процесс, даже не зная подробной математической модели процесса. Некоторые из приложений включают управление скоростью двигателя на основе ПИД-регулятора, контроль температуры, контроль давления, контроль расхода, уровень жидкости и т.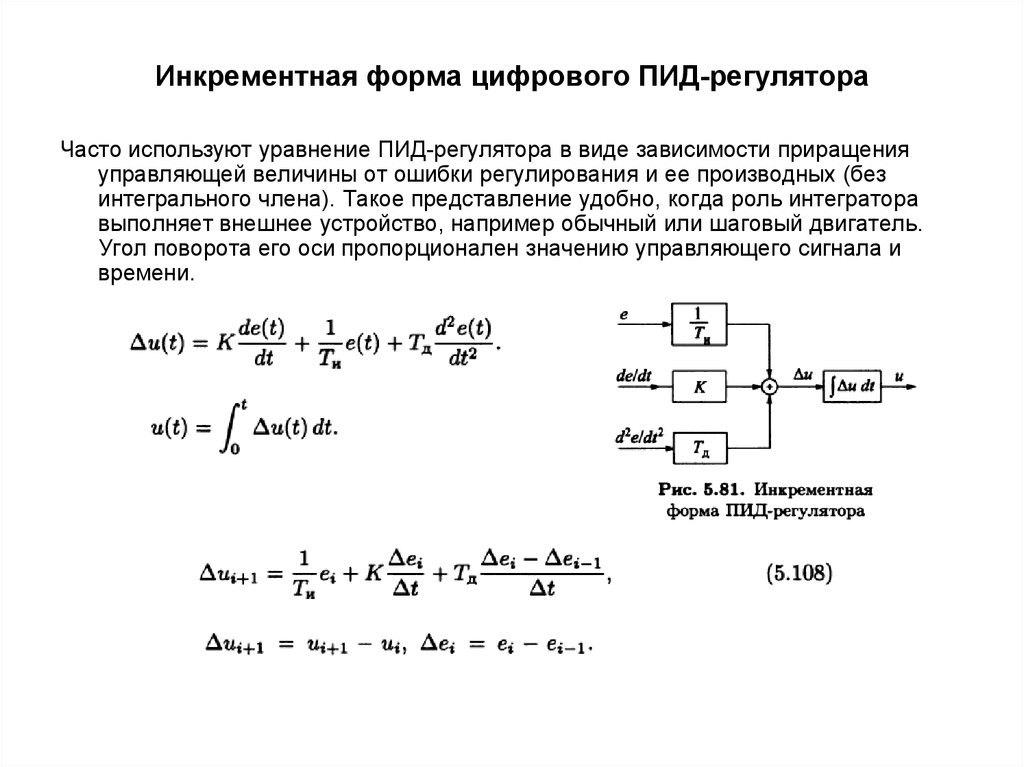 д.
д.
ПИД-регуляторы реального времени
На современном рынке доступны различные типы ПИД-регуляторов, которые можно использовать для любых промышленных задач управления, таких как уровень, расход, температура и давление. При принятии решения об управлении такими параметрами процесса с помощью ПИД-регулятора можно использовать либо ПЛК, либо автономный ПИД-регулятор.
Автономные ПИД-регуляторы используются там, где необходимо контролировать и контролировать один или два контура или в ситуациях, когда к ним трудно получить доступ в более крупных системах. Эти специализированные устройства управления предлагают множество вариантов для одноконтурного и двухконтурного управления. Автономные ПИД-регуляторы предлагают несколько конфигураций уставок, а также генерируют несколько независимых аварийных сигналов.
Некоторые из этих автономных контроллеров включают контроллеры температуры Yokogava, ПИД-регуляторы Honeywell, ПИД-регуляторы OMEGA с автоматической настройкой, ПИД-регуляторы ABB и ПИД-регуляторы Siemens.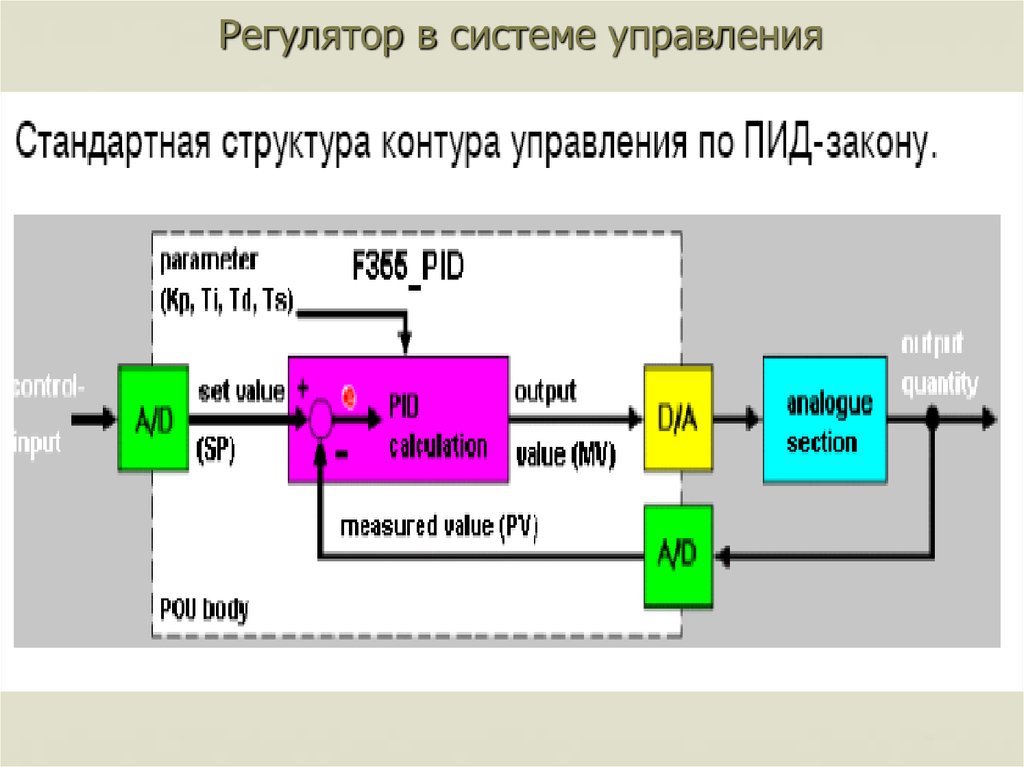
Похожие записи
-

 Фигуры на осциллографе: Фигуры Лиссажу — Практическая электроника
Фигуры на осциллографе: Фигуры Лиссажу — Практическая электроника - Колонки онлайн: Радио онлайн слушать бесплатно — 101.ru. Слушайте Звук Колонок
- Tmfk60M1A1: Таймер регулятор мощности микроволновки tmfk60m1a1 — Ремонт микроволновых печей — Крупная бытовая техника — Каталог статей
- Зеркало с android: Android-зеркало в автомобиле – насколько это удобно?