Пид регулятор это: ПИД регулятор
Содержание
Что такое ПИД-регулятор схема подключения
ПИД-регулятор – это устройство для поддержания в нужном интервале параметров. Если говорить другими словами, то это устройство с обратной связью в управляющем контуре. Оно универсально и позволяет реализовать все возможные законы регулирования.
Где используются пид-регуляторы?
- Для промышленного оборудования;
- В роботехнике;
- Централизированном АСУ ТП.
Сфера применения их практически неограниченная. С их помощью значение быстро возвращается в нужный интервал, а это позволяет обеспечить качественную и бесперебойную работу. Да и стоимость устройств доступная для всех.
Что представляет собой ПИД-регулятор?
Ранее уже говорилось, что представляет собой это устройство, но разберем, из чего состоит управляющий сигнал. Выделяют следующие компоненты:
- Пропорциональный. Создается на базе отличий фактического и указанного параметра. Колебания характеристик напрямую влияет на силу сигнала.
 Ключевой минус П-регуляторов – статическая ошибка и ограниченная точность.
Ключевой минус П-регуляторов – статическая ошибка и ограниченная точность. - Интегральный. Устраняет статическую ошибку. Задача его компенсировать ошибку, изменить параметры до заданных параметров Такой вид управления не используется для динамических систем, так как суммирование ошибок может привести к росту сигнала, а система дает сбой.
- Дифференциальной. Используется с целью увеличения быстродействия. Благодаря этой составляющей скорость изменений значений уменьшается или увеличивается пропорционально.
 Ключевой минус П-регуляторов – статическая ошибка и ограниченная точность.
Ключевой минус П-регуляторов – статическая ошибка и ограниченная точность.
Настройки ПИД-регулятора
Осуществляется она после выполнения расчетов по специальной формуле и после определения пропорционального, интегрального и дифференциального коэффициента.
Далее уже определяются передаточные функции, происходит вычисление показателей:
- Скорость регулирования;
- Инерционность;
- Точность и т.п.
При этом важно понимать, что все расчеты в данном случае производятся для оборудования, работающего в идеальных условиях. Наличие же каких-то помех и других аспектов не позволяет применять эти параметры для создания системы авторегулирования. Именно поэтому расчеты являются лишь дополнительным источником, не более. Кроме того, желательно, чтобы их производили специалисты. Так результат будет точным.
Наличие же каких-то помех и других аспектов не позволяет применять эти параметры для создания системы авторегулирования. Именно поэтому расчеты являются лишь дополнительным источником, не более. Кроме того, желательно, чтобы их производили специалисты. Так результат будет точным.
При создании ПИД-регуляторов используется устройство, которое воспроизводит изменение параметров, а также измерительное оборудование. Это позволяет мониторить систему и подбирать нужные коэффициенты.
Выглядит это примерно так: устанавливается оборудование, вводятся необходимые коэффициенты и настраиваются.
Пример использование ПИД-регулятора в приводе насоса
Самая простая схема подключения представляет собой следующее:
- Датчик и внешнее оборудование подключается к входам.
- Задается нужное давление. При любом изменении параметра создается сигнал.
- Преобразователь снижает или уменьшает напряжение электродвигателя до достижения заданных параметров давления. Соответственно, давление от расхода в системе не зависит.
 Соответственно, давление от расхода в системе не зависит.
Соответственно, давление от расхода в системе не зависит.
Это простейшая схема. Преобразователи также управлять могут несколькими показателями. К примеру, отопительные насосы регулируются по уличной температуре и теплоносителя. Выбор оборудования напрямую зависит от области применения.
Используются устройства ПИД-регулятором и в сложных конструкциях. Главное – выбрать правильное оборудование. Одним из надежных и востребованных считается регулятор Danfoss. Это профессиональное оборудование, способное прослужить не один десяток лет. Стоимость на него доступная, как частному лицу, так и крупной компании, поэтому приобрести это устройство не составит труда.
Просто о PID-регулировании
#Dataforth
В записную книжку инженера
Принцип PID-регулирования используется в автоматическом управлении процессами повсеместно. Большинство современных промышленных контроллеров имеют встроенный механизм, реализующий PID-управление. Но для успешного применения этого мощного средства необходимо чётко понимать механизм его действия. Эта статья в популярной форме представляет начальные сведения о PID-регулировании.
Но для успешного применения этого мощного средства необходимо чётко понимать механизм его действия. Эта статья в популярной форме представляет начальные сведения о PID-регулировании.
12371
В ЗАКЛАДКИ
Статья
в электронной версии
«СТА» №4 / 2019 стр. 92
Статья в PDF
3 МБ
А знаете ли вы, что…
В 1939 году приборостроительная компания Taylor представила новую версию своего пневматического контроллера Fulscope с функцией предварительного действия в дополнение к ранее доступным режимам пропорционального управления и сброса. В настоящее время три режима управления называются пропорциональным, интегральным (сброс) и дифференциальным (предварительное действие), следовательно, сокращённо PID. В отечественной литературе принята аббревиатура ПИД, означающая пропорционально-интегрально-дифференциальный режим. В том же году компания Foxboro Instrument добавила к ранее доступным в контроллере Stabilog режимам пропорциональности и сброса гиперсброс, что делает его вторым ПИД-регулятором на рынке. Сегодня все ПИД‑регуляторы, в том числе и в системе Dataforth MAQ®20, основаны на тех самых пропорциональном, интегральном и производном (дифференциальном) режимах контроллеров, выпущенных в 1939 году (рис. 1).
В том же году компания Foxboro Instrument добавила к ранее доступным в контроллере Stabilog режимам пропорциональности и сброса гиперсброс, что делает его вторым ПИД-регулятором на рынке. Сегодня все ПИД‑регуляторы, в том числе и в системе Dataforth MAQ®20, основаны на тех самых пропорциональном, интегральном и производном (дифференциальном) режимах контроллеров, выпущенных в 1939 году (рис. 1).
ПИД‑регуляторы используются в большинстве приложений автоматического управления процессами в промышленности. Они могут регулировать расход, температуру, давление, уровень и многие другие параметры производственных процессов. В статье рассматривается конструкция ПИД‑регуляторов и объясняются используемые в них режимы управления P, I и D.
Ручное управление
В отсутствие автоматических контроллеров все задачи регулирования приходится выполнять вручную. Например, для поддержания постоянной температуры воды, подогреваемой промышленным газовым нагревателем, оператор должен следить за датчиком температуры и соответствующим образом регулировать подачу газа при помощи клапана (рис. 2).
2).
Если температура воды по какой-либо причине становится слишком высокой, оператор должен немного закрыть газовый клапан на величину, достаточную, чтобы температура вернулась к желаемому значению. Если вода становится слишком холодной, он должен приоткрыть газовый клапан.
Контроль и обратная связь
Процесс управления, реализуемый оператором, называется управлением с обратной связью, поскольку оператор изменяет силу пламени на основе обратной связи, которую он получает от процесса через датчик температуры. Управление с обратной связью может быть выполнено вручную, но обычно это происходит автоматически, как будет объяснено в следующем разделе. Клапан, процесс горения и датчик температуры образуют контур управления. Любое изменение, вносимое оператором в состояние газового клапана, влияет на температуру, значение которой становится доступно оператору, тем самым контур управления замыкается.
Автоматическое управление
Чтобы избавить оператора от утомительной задачи ручного управления, функцию управления можно автоматизировать с помощью ПИД‑регулятора. Для этого требуется следующее: Установить электронное устройство измерения температуры. Автоматизировать клапан, добавив к нему исполнительный механизм (и, возможно, позиционер), чтобы клапаном можно было управлять электронным способом. Установить контроллер, например, ПИДрегулятор MAQ®‑20, и подключить к нему устройство измерения температуры и автоматизированный клапан управления. Более подробная информация о PID-регуляторе Dataforth MAQ®20 представлена во врезке.
Для этого требуется следующее: Установить электронное устройство измерения температуры. Автоматизировать клапан, добавив к нему исполнительный механизм (и, возможно, позиционер), чтобы клапаном можно было управлять электронным способом. Установить контроллер, например, ПИДрегулятор MAQ®‑20, и подключить к нему устройство измерения температуры и автоматизированный клапан управления. Более подробная информация о PID-регуляторе Dataforth MAQ®20 представлена во врезке.
ПИД‑регулятор имеет уставку (SP — Set Point), чтобы оператор мог задать значение температуры. Выходной сигнал контроллера (CO — Controller Output) устанавливает положение регулирующего клапана. А значение измеренной температуры, называемое параметром регулирования процесса (или переменной процесса, PV — Process Variable), даёт контроллеру столь необходимую обратную связь. Переменная процесса и выходной сигнал контроллера передаются в цифровой форме или посредством сигналов тока, напряжения (рис. 3).
3).
Когда всё включено и работает, ПИД‑регулятор получает сигнал переменной процесса, сравнивает его с уставкой и вычисляет разницу между двумя сигналами, также называемую ошибкой (E — Error). Затем на основании величины ошибки и констант настройки ПИД-регулятора контроллер рассчитывает соответствующий выходной сигнал, который устанавливает регулирующий клапан в правильное положение для поддержания температуры на заданном уровне. Если температура поднимется выше заданного значения, контроллер уменьшит степень открытия клапана, и наоборот.
ПИД-контроль
ПИД-регуляторы имеют три режима управления: пропорциональный, интегральный и дифференциальный. Каждый из трёх режимов по-своему реагирует на возникновение ошибки. Размер и характер отклика, создаваемого каждым режимом управления, регулируется путём изменения соответствующих настроек контроллера.
Режим пропорционального управления
Главной движущей силой в контроллере является режим пропорционального управления. Он изменяет сигнал на выходе контроллера пропорционально ошибке (рис. 4).
Он изменяет сигнал на выходе контроллера пропорционально ошибке (рис. 4).
Если ошибка увеличивается, управляющее действие увеличивается пропорционально ей. Это очень полезно, так как для исправления бо́льших ошибок требуется более интенсивное действие. Регулируемая настройка для пропорционального управления называется усилением контроллера (Kc — Controller Gain). Более высокое усиление увеличит пропорциональное управляющее воздействие для данной ошибки. Если усиление регулятора установлено слишком высоким, контур управления начнёт колебаться и станет нестабильным. Если усиление регулятора установлено слишком низким, контроллер не будет адекватно реагировать на изменения параметра регулирования или уставки.
В большинстве контроллеров изменение усиления влияет на величину отклика в интегральном и дифференциальном режимах управления. Вот почему этот параметр называется усилением контроллера. Однако существует одна конструкция контроллера (называемая алгоритмом параллельного, или независимого усиления), в которой регулировка пропорционального усиления не влияет на другие режимы.
Пропорциональный контроллер
Отключив интегральный и дифференциальный режимы, ПИД-регулятор можно настроить так, чтобы он производил только пропорциональное действие. Пропорциональные контроллеры просты для понимания и настройки. Выходной сигнал контроллера — это просто ошибка управления, умноженная на усиление контроллера, плюс смещение (рис. 5).
Смещение необходимо, чтобы контроллер мог поддерживать ненулевой выходной сигнал при нулевой ошибке (переменная процесса в заданном значении). Использование пропорционального управления имеет большой недостаток — отклонение. Отклонение — это постоянная ошибка, которая не может быть устранена одним только пропорциональным управлением. Давайте рассмотрим контроль уровня воды в баке на рис. 6 с помощью пропорционального контроллера.
Пока расход воды из бака остаётся постоянным, уровень будет находиться на заданном значении. Но если оператор увеличит расход из резервуара, уровень воды начнёт уменьшаться из-за дисбаланса между притоком и оттоком.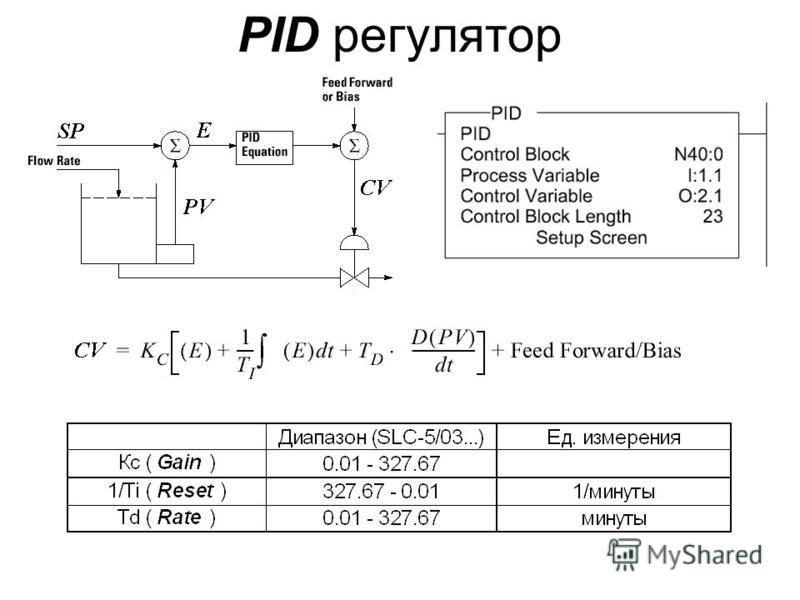 При снижении уровня воды в баке ошибка растёт и пропорциональный контроллер увеличивает выходной сигнал пропорционально этой ошибке. Следовательно, клапан, управляющий потоком в бак, открывается шире и в бак поступает больше воды. Если уровень всё равно продолжает падать, ошибка увеличивается ещё больше и клапан продолжает открываться, пока не будет достигнута точка, в которой приток снова будет соответствовать оттоку. В этот момент уровень воды в баке (и ошибка) станет постоянным. Поскольку ошибка остаётся постоянной, наш P‑контроллер будет поддерживать постоянный выходной сигнал и регулирующий клапан будет удерживать своё положение. Система теперь снова сбалансирована, но уровень воды в баке стал ниже заданного значения. Эта оставшаяся постоянная ошибка называется отклонением. На рис. 7 показано влияние внезапного снижения давления топливного газа на работу описанного ранее промышленного нагревателя и реакция пропорционального контроллера на данную ситуацию.
При снижении уровня воды в баке ошибка растёт и пропорциональный контроллер увеличивает выходной сигнал пропорционально этой ошибке. Следовательно, клапан, управляющий потоком в бак, открывается шире и в бак поступает больше воды. Если уровень всё равно продолжает падать, ошибка увеличивается ещё больше и клапан продолжает открываться, пока не будет достигнута точка, в которой приток снова будет соответствовать оттоку. В этот момент уровень воды в баке (и ошибка) станет постоянным. Поскольку ошибка остаётся постоянной, наш P‑контроллер будет поддерживать постоянный выходной сигнал и регулирующий клапан будет удерживать своё положение. Система теперь снова сбалансирована, но уровень воды в баке стал ниже заданного значения. Эта оставшаяся постоянная ошибка называется отклонением. На рис. 7 показано влияние внезапного снижения давления топливного газа на работу описанного ранее промышленного нагревателя и реакция пропорционального контроллера на данную ситуацию.
Снижение давления топливного газа понижает интенсивность горения и соответственно мощность нагревателя. Температура воды снижается. Это создаёт ошибку, на которую отвечает контроллер. Однако обнаруживается новая точка баланса между управляющим воздействием и ошибкой и изменение температуры пропорциональным регулятором не устраняется. При пропорциональном управлении отклонение будет сохраняться до тех пор, пока оператор с целью его устранения вручную не скорректирует выходной сигнал контроллера. Тогда говорят, что оператор вручную сбрасывает контроллер.
Температура воды снижается. Это создаёт ошибку, на которую отвечает контроллер. Однако обнаруживается новая точка баланса между управляющим воздействием и ошибкой и изменение температуры пропорциональным регулятором не устраняется. При пропорциональном управлении отклонение будет сохраняться до тех пор, пока оператор с целью его устранения вручную не скорректирует выходной сигнал контроллера. Тогда говорят, что оператор вручную сбрасывает контроллер.
Интегральный режим управления
Необходимость избавиться от ручного сброса по описанному ранее сценарию привела к разработке автоматического сброса, или режима встроенного управления, как это называется сегодня. Функция режима встроенного управления заключается в увеличении или уменьшении выходного сигнала контроллера с течением времени, чтобы уменьшить имеющуюся ошибку (когда переменная процесса не находится в заданном интервале значений). При наличии достаточного времени интегральный механизм будет изменять выходной сигнал контроллера, пока ошибка не станет равной нулю.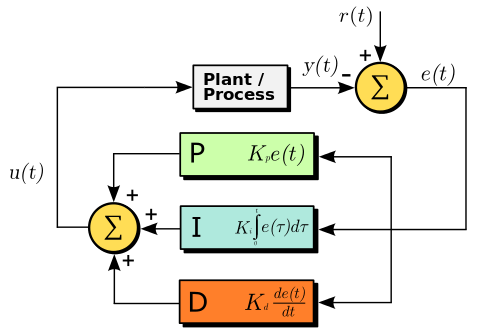 Если ошибка велика, интегральный режим будет увеличивать/уменьшать выходной сигнал контроллера с более высокой скоростью; если ошибка мала, изменения будут медленными. Для данной ошибки скорость интегрального действия задаётся интегральной настройкой времени контроллера (Ti — Integral Time). Большое значение Ti (длинное время интегрирования) приводит к медленному интегральному действию, а небольшое значение Ti (короткое время интегрирования) приводит к быстрому интегральному действию (рис. 8).
Если ошибка велика, интегральный режим будет увеличивать/уменьшать выходной сигнал контроллера с более высокой скоростью; если ошибка мала, изменения будут медленными. Для данной ошибки скорость интегрального действия задаётся интегральной настройкой времени контроллера (Ti — Integral Time). Большое значение Ti (длинное время интегрирования) приводит к медленному интегральному действию, а небольшое значение Ti (короткое время интегрирования) приводит к быстрому интегральному действию (рис. 8).
Если интервал времени интегрирования установлен слишком большим, контроллер будет реагировать медленно; если он установлен слишком коротким, контур управления будет колебаться и станет нестабильным. Большинство контроллеров, включая MAQ®20, в качестве единицы измерения для интегрального управления используют интегральное время (Ti) в минутах, но некоторые определяют его в секундах. Немногие контроллеры, обычно с параллельным алгоритмом, используют параметр «интегральное усиление» (Ki) в повторениях в минуту. Параллельный алгоритм работы также доступен в MAQ®20.
Параллельный алгоритм работы также доступен в MAQ®20.
Пропорционально-интегральный контроллер
Обычно пропорционально-интегральный контроллер называют PI‑контроллером, его выход состоит из суммы пропорциональных и интегральных управляющих воздействий (рис. 9).
На рис. 10 показано, как после возмущения интегральный режим продолжает увеличивать выходной сигнал контроллера, чтобы вернуть температуру на выходе нагревателя к заданному значению.
Если сравнить это с рис. 7, становится ясно, как интегральное управление продолжает управлять выходом контроллера до тех пор, пока смещение не будет устранено полностью.
Режим дифференциального управления
Третий режим управления в ПИД-контроллере — это режим управления по производной. Дифференциальный контроль редко используется в управлении процессами, но он часто применяется в управлении движением.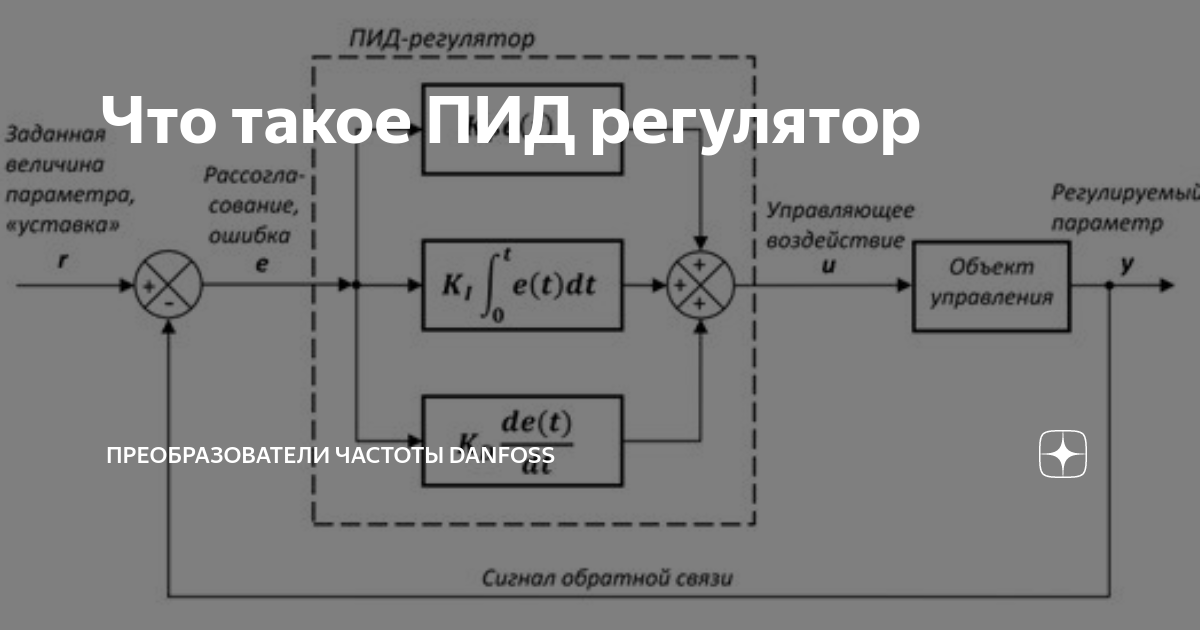 Для управления процессом это не является абсолютно необходимым: дифференциальный режим очень чувствителен к инструментальному шуму и усложняет настройку методом проб и ошибок. Тем не менее, его использование может привести к тому, что определённые типы контуров управления будут реагировать немного быстрее, чем при применении только ПИ-регулирования. Температурное управление, например, является типичной задачей для ПИД-регулирования. Режим управления по производной обеспечивает сигнал, основанный на скорости изменения ошибки (рис. 11).
Для управления процессом это не является абсолютно необходимым: дифференциальный режим очень чувствителен к инструментальному шуму и усложняет настройку методом проб и ошибок. Тем не менее, его использование может привести к тому, что определённые типы контуров управления будут реагировать немного быстрее, чем при применении только ПИ-регулирования. Температурное управление, например, является типичной задачей для ПИД-регулирования. Режим управления по производной обеспечивает сигнал, основанный на скорости изменения ошибки (рис. 11).
Из-за этого дифференциальный режим изначально назывался управлением по скорости. Дифференциальный режим производит большее управляющее действие, если ошибка изменяется с большей скоростью. Если величина ошибки не меняется во времени, действие дифференциальной составляющей равно нулю. Дифференциальный режим имеет настройку, называемую Derivative Time (Td). Чем больше значение этого времени, тем больше вклад дифференциального управления. Установка времени Td на ноль полностью отключает этот режим. Если время установлено слишком большим, будут возникать колебания и контур управления станет нестабилен. Для настройки дифференциальной составляющей контроллера используются две единицы измерения: минуты и секунды.
Установка времени Td на ноль полностью отключает этот режим. Если время установлено слишком большим, будут возникать колебания и контур управления станет нестабилен. Для настройки дифференциальной составляющей контроллера используются две единицы измерения: минуты и секунды.
Пропорционально-интегрально-дифференциальный контроллер
Такой контроллер, обычно называемый ПИД-регулятором, работает на основе суммы пропорциональных, интегральных и дифференциальных управляющих воздействий.
На рис. 12 показан алгоритм неинтерактивного (также называемого идеальным) ПИД-регулятора, а на рис. 13 представлен алгоритм параллельного контроллера.
Оба они поддерживаются в системе MAQ®20. Дифференциальный режим ПИД-регулятора обеспечивает большее управляющее воздействие раньше, чем это возможно при управлении только P или PI.
Это уменьшает влияние возмущения и сокращает время, необходимое для того, чтобы уровень вернулся к своему заданному значению (рис. 14).
14).
На рис. 15 сравнивается скорость восстановления при P, PI и PID-регулировании температуры на выходе нагревателя после внезапного изменения давления топливного газа, как описано ранее.
Заключение
ПИД-регулятор является рабочей лошадкой современных систем управления процессами. Каждый из режимов пропорционального, интегрального и дифференциального управления выполняет свою уникальную функцию. Пропорциональные и интегральные режимы необходимы для большинства контуров управления, а регулирование по производной полезно только в некоторых случаях. Существуют различные алгоритмы ПИД‑регулирования, и MAQ®20 поддерживает наиболее распространённый неинтерактивный алгоритм, а также параллельный алгоритм.
Универсальность делает MAQ®20 чрезвычайно мощным устройством и адаптируемым для широкого спектра приложений управления процессами, включая:
- тестирование и измерения;
- автоматизацию производства и процессов;
- автоматизацию машин;
- военную и аэрокосмическую промышленность;
- энергетику;
- мониторинг окружающей среды;
- нефтегазовую сферу.

Линейка продуктов MAQ®20, вобравшая в себя более 25 лет опыта проектирования компании Dataforth в индустрии управления процессами, предлагает самую низкую стоимость на канал, точность ±0,035% и изоляцию 1500 В, а также обеспечивает превосходное ПИД-управление процессами.
Авторизованный перевод Юрия Широкова
E-mail: [email protected]
#Dataforth
Показать больше
ПИД-регулятор и объяснение теории
Основная идея ПИД-регулятора состоит в том, чтобы считывать показания датчика, затем вычислять требуемый выходной сигнал исполнительного механизма путем вычисления пропорционального, интегрального и производного откликов и суммирования этих трех компонентов для вычисления выходного сигнала. Прежде чем мы начнем определять параметры ПИД-регулятора, мы увидим, что такое система с замкнутым контуром и некоторые связанные с ней термины.
Замкнутая система
В типичной системе управления переменная процесса — это системный параметр, который необходимо контролировать, например, температура (ºC), давление (psi) или скорость потока (литры/мин). Датчик используется для измерения переменной процесса и обеспечения обратной связи с системой управления. Уставка — это желаемое или заданное значение переменной процесса, например 100 градусов Цельсия в случае системы контроля температуры. В любой момент времени разница между переменной процесса и заданным значением используется алгоритмом системы управления 9.0009 (компенсатор) , чтобы определить желаемую выходную мощность привода для управления системой (установкой). Например, если измеренная переменная процесса температуры составляет 100 ºC, а желаемая уставка температуры равна 120 ºC, то выходной сигнал привода , заданный алгоритмом управления, может управлять нагревателем. Приведение в действие исполнительного механизма для включения нагревателя приводит к тому, что система нагревается, что приводит к увеличению технологической переменной температуры. Это называется системой управления с замкнутым контуром, потому что процесс считывания показаний датчиков для обеспечения постоянной обратной связи и расчета желаемого выходного сигнала исполнительного механизма повторяется непрерывно и с фиксированной скоростью цикла, как показано на рисунке 1.9.0004
Это называется системой управления с замкнутым контуром, потому что процесс считывания показаний датчиков для обеспечения постоянной обратной связи и расчета желаемого выходного сигнала исполнительного механизма повторяется непрерывно и с фиксированной скоростью цикла, как показано на рисунке 1.9.0004
Во многих случаях выход привода — не единственный сигнал, влияющий на систему. Например, в температурной камере может быть источник холодного воздуха, который иногда дует в камеру и нарушает температуру. Такой термин обозначается как возмущение . Обычно мы пытаемся спроектировать систему управления так, чтобы свести к минимуму влияние возмущений на переменную процесса.
Рис. 1: Блок-схема типичной замкнутой системы.
Определение терминов
Процесс разработки системы управления начинается с определения требований к производительности. Производительность системы управления часто измеряется путем применения ступенчатой функции в качестве командной переменной уставки, а затем измерения отклика переменной процесса.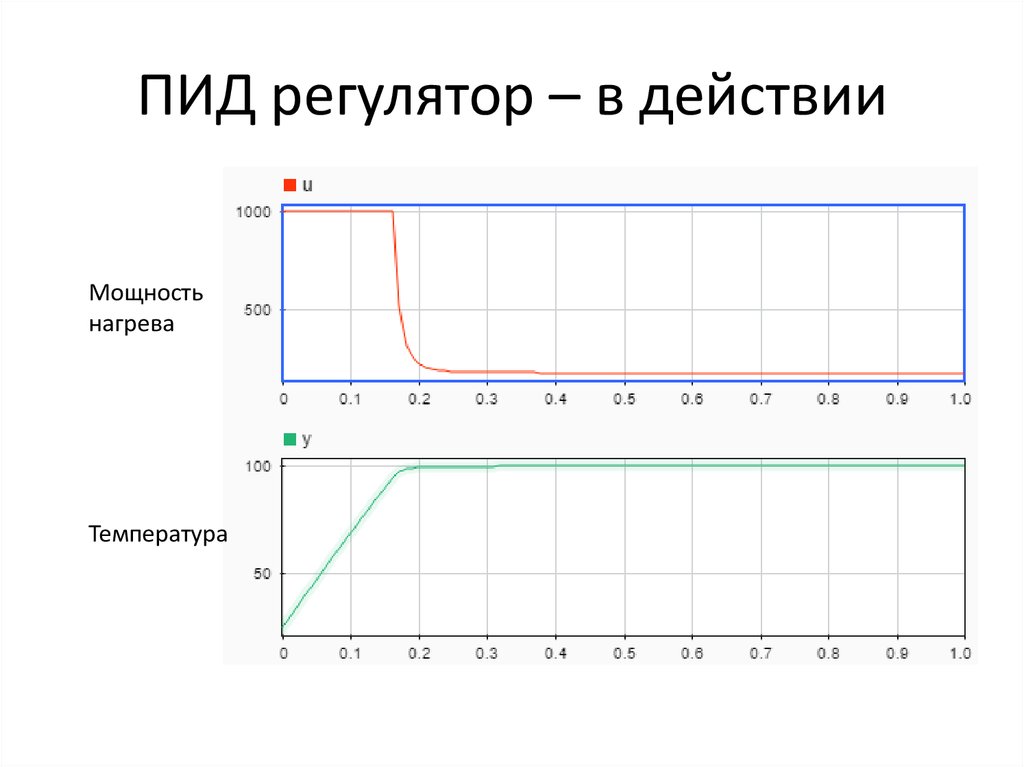 Обычно ответ определяется количественно путем измерения определенных характеристик сигнала. Время нарастания — это количество времени, которое требуется системе для перехода от 10% к 90% установившегося или конечного значения. Процент превышения — это величина превышения переменной процесса конечного значения, выраженная в процентах от конечного значения. Время установления — это время, необходимое для того, чтобы переменная процесса установилась в пределах определенного процента (обычно 5 %) от конечного значения. Установившаяся ошибка — это окончательная разница между переменной процесса и заданным значением. Обратите внимание, что точное определение этих величин будет различаться в промышленности и научных кругах.
Обычно ответ определяется количественно путем измерения определенных характеристик сигнала. Время нарастания — это количество времени, которое требуется системе для перехода от 10% к 90% установившегося или конечного значения. Процент превышения — это величина превышения переменной процесса конечного значения, выраженная в процентах от конечного значения. Время установления — это время, необходимое для того, чтобы переменная процесса установилась в пределах определенного процента (обычно 5 %) от конечного значения. Установившаяся ошибка — это окончательная разница между переменной процесса и заданным значением. Обратите внимание, что точное определение этих величин будет различаться в промышленности и научных кругах.
Рис. 2: Реакция типичной замкнутой системы ПИД-регулятора.
После использования одной или всех этих величин для определения требований к производительности системы управления полезно определить наихудшие условия, при которых ожидается, что система управления будет соответствовать этим проектным требованиям. Часто в системе возникает возмущение, которое влияет на переменную процесса или измерение переменной процесса. Важно разработать систему управления, которая удовлетворительно работает в наихудших условиях. Мера того, насколько хорошо система управления способна преодолевать последствия возмущений, называется 9.0009 Подавление помех системы управления.
Часто в системе возникает возмущение, которое влияет на переменную процесса или измерение переменной процесса. Важно разработать систему управления, которая удовлетворительно работает в наихудших условиях. Мера того, насколько хорошо система управления способна преодолевать последствия возмущений, называется 9.0009 Подавление помех системы управления.
В некоторых случаях реакция системы на заданный управляющий выход может меняться со временем или в зависимости от какой-либо переменной. Нелинейная система представляет собой систему, в которой параметры управления, дающие желаемую реакцию в одной рабочей точке, могут не дать удовлетворительной реакции в другой рабочей точке. Например, камера, частично заполненная жидкостью, будет демонстрировать гораздо более быструю реакцию на мощность нагревателя, когда она почти пуста, чем когда она почти заполнена жидкостью. Мера того, насколько хорошо система управления будет выдерживать помехи и нелинейности, называется надежность системы управления.
Некоторые системы демонстрируют нежелательное поведение, называемое deadtime . Мертвое время — это задержка между изменением переменной процесса и моментом, когда это изменение можно наблюдать. Например, если датчик температуры расположен далеко от впускного клапана для холодной воды, он не будет измерять изменение температуры немедленно, если клапан открыт или закрыт. Время простоя также может быть вызвано системой или выходным приводом, который медленно реагирует на управляющую команду, например, клапан, который медленно открывается или закрывается. Распространенным источником простоя на химических заводах является задержка, вызванная потоком жидкости по трубам.
Цикл цикла также является важным параметром замкнутой системы. Интервал времени между вызовами алгоритма управления является временем цикла цикла. Системы, которые быстро изменяются или имеют сложное поведение, требуют более высоких скоростей контура управления.
Рис. 3: Реакция замкнутой системы с мертвым временем.
3: Реакция замкнутой системы с мертвым временем.
После определения требований к производительности настало время изучить систему и выбрать подходящую схему управления. В подавляющем большинстве приложений ПИД-регулятор обеспечивает требуемые результаты
Объяснение ПИД-регулятора — RealPars
В этой статье мы поговорим о ПИД-регуляторе и его преобразовании из одностанционного устройства в то, во что оно превратилось сегодня.
Мы собираемся объяснить, почему ПИД-регуляторы используются в промышленных процессах вместо простых контроллеров ВКЛ/ВЫКЛ.
Мы покажем, как настройки контроллера, называемые пропорциональным, интегральным и производным, влияют на различные процессы, находящиеся под контролем.
Мы также предоставим обзор очень важного действия под названием «Настройка контроллера».
Простой пример
Начнем с обсуждения регулирования температуры в доме, так как оно знакомо многим.
В этом доме есть печь, которая распределяет тепло по всему дому, и настенный контроллер, называемый термостатом.
Термостат имеет датчик, который измеряет температуру в помещении и сравнивает это измерение с регулируемой уставкой.
Если температура в помещении ниже уставки, печь включается.
Когда комнатная температура поднимается выше заданного значения, печь выключается. Этот тип управления называется ON/OFF или Bang-Bang Control.
Ниже приведен график изменения комнатной температуры в зависимости от периода времени, когда печь включается и выключается.
Как видите, температура не держится точно на заданном значении 70°F, а циклически поднимается и опускается ниже заданного значения.
Управление ВКЛ/ВЫКЛ может подойти для вашего дома, но не подходит для промышленных процессов или управления движением.
Промышленный пример
Давайте рассмотрим пример контроля уровня в резервуаре, чтобы объяснить почему. Клапан наполняет бак, когда насос его опорожняет. Если клапан работает с управлением ВКЛ/ВЫКЛ, вода будет колебаться около уставки 50%.
Предположим, что отклонение составляет ±10%. В большинстве промышленных применений такое колебание уставки неприемлемо.
Хорошо, а что, если клапан можно задушить и поставить в любое положение между ВКЛ и ВЫКЛ?
ПИД-регулятор
Теперь мы можем перейти к разговору о ПИД-регуляторе. P означает пропорциональную, I — интегральную, D — производную.
Поскольку каждый процесс реагирует по-разному, ПИД-регулятор определяет, насколько и как быстро применяется коррекция, используя различные количества Пропорциональное , Интегральное и Производное действия.
Каждый блок вносит уникальный сигнал, который суммируется для создания выходного сигнала контроллера.
Контур управления с обратной связью
Давайте посмотрим, как ПИД-регулятор вписывается в контур управления с обратной связью. Контролер отвечает за то, чтобы Процесс оставался как можно ближе к желаемому значению, независимо от различных сбоев.
Контроллер сравнивает сигнал переменной процесса преобразователя (PV) и заданное значение.
На основе этого сравнения контроллер формирует выходной сигнал для управления исполнительным элементом. Этот выходной сигнал ПИД-регулятора может управлять конечным элементом управления во всем 100% диапазоне.
Логический блок ПИД-регулятора
Большинство современных ПИД-регуляторов являются частью ПЛК или РСУ и создаются в логике управления программой с помощью команд блока.
Автономный ПИД-регулятор
До появления ПЛК ПИД-регулятор был автономным устройством, отвечающим за управление одним контуром.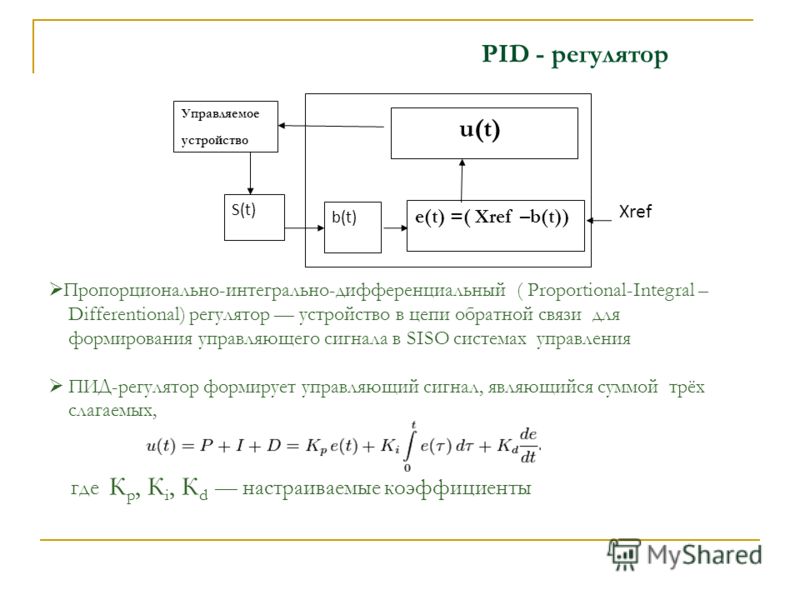
Параметры ПИД-регулятора
Диспетчерская может иметь десятки или сотни автономных контроллеров, установленных на панели.
В настоящее время все еще производится и используется много автономных ПИД-регуляторов.
Хорошо, давайте вернемся и поговорим о том, что каждый из P , I и D компонентов ПИД-регулятора.
Помните, ранее мы говорили, что ПИД-регулятор отвечает за то, чтобы процесс оставался как можно ближе к заданному значению, независимо от различных сбоев.
Давайте будем называть разницу между переменной процесса и заданным значением сигналом ошибки.
1) Пропорциональный блок
Пропорциональный блок создает выходной сигнал, пропорциональный величина сигнала ошибки.
К сожалению, чем ближе вы подходите к уставке, тем меньше она давит. В конце концов, процесс просто постоянно работает близко к заданному значению, но не совсем там.
Вот когда в дело вступает интеграл.
2) Интегральный блок
Интегральный блок создает выходной сигнал, пропорциональный длительности и амплитуде сигнала ошибки.
Чем длиннее ошибка и больше сумма, тем больше интегральный выход.
Пока существует ошибка, интегральное действие будет продолжаться.
3) Блок производных
Блок производных создает выходной сигнал, пропорциональный скорости изменения сигнала ошибки.
Чем быстрее изменяется ошибка, тем больше выходная производная.
Производное управление заглядывает вперед , чтобы увидеть, какой будет ошибка в будущем, и соответственно вносит свой вклад в выходной сигнал контроллера. Это подводит нас к термину под названием Настройка контроллера .
Настройка контроллера
Ранее мы говорили, что каждый процесс реагирует по-разному и что ПИД-регулятор определяет, насколько и как быстро применяется коррекция, регулируя пропорциональное, интегральное и дифференциальное действие.
Настройка контроллера включает в себя правильную настройку значений контроллера P , I и D для конкретных требований процесса. Интересно, что правильные настройки, достигнутые с помощью настройки контроллера, могут сильно различаться между процессами из-за специфических требований.
Например, после настройки контроллера скачок заданного значения на один процент в регуляторе уровня в резервуаре вызывает четвертьволновую затухающую реакцию.
Этот тип ответа может быть подходящим для процесса на уровне резервуара, но может быть катастрофическим в процессе управления движением.
Методы настройки контроллера
Существует множество различных ручных методов настройки контроллера, которые включают наблюдение за реакцией процесса после изменения уставки контроллера.
Один метод включает в себя увеличение степени изменения уставки и повторение процедуры до тех пор, пока процесс не войдет в состояние установившихся колебаний.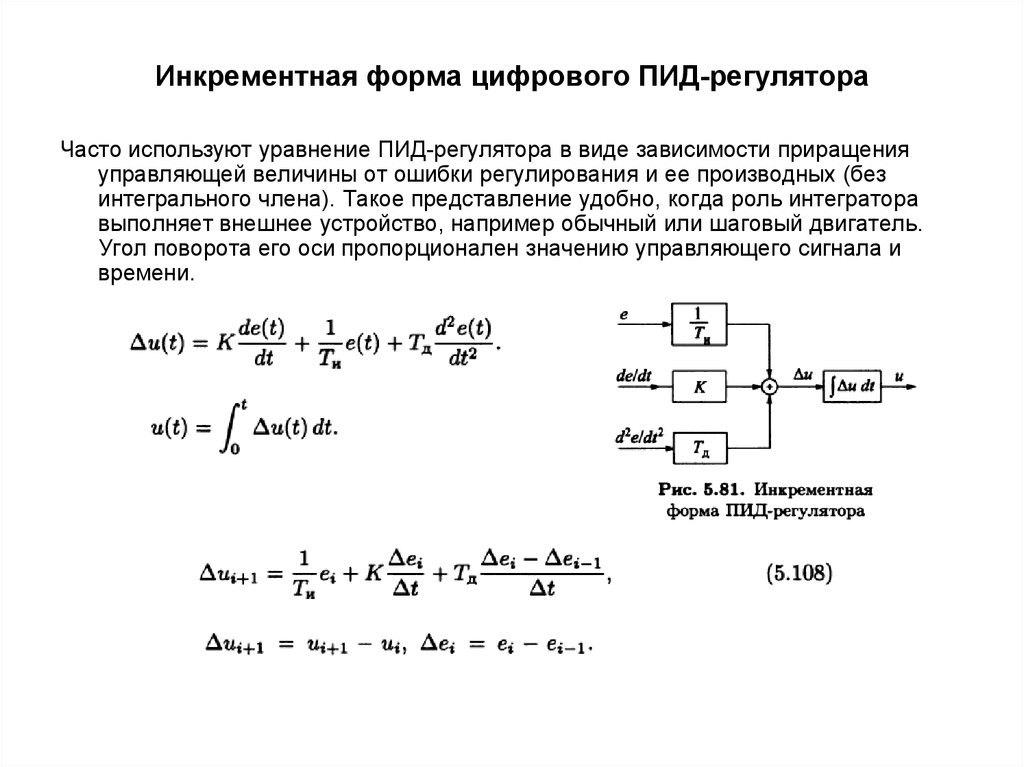
Этот метод настройки дает адекватные результаты, но часто непрактичен во многих приложениях. Например, насколько практично заставить уровень жидкости в большом резервуаре достигать установившихся колебаний?
Большинство продаваемых сегодня контроллеров процессов, ПЛК и контроллеров контуров РСУ имеют функцию автонастройки.
ПИД-регулятор изучает как процесс реагирует на изменение уставки и предлагаемые настройки PID.
Независимо от того, получены ли исходные параметры ПИД-регулятора с помощью методов ручной или автоматической настройки, опытным специалистам по автоматизации часто требуется дополнительная настройка для получения желаемого отклика.
Если вы хотите узнать больше о ПИД-регулировании, вы можете ознакомиться с двумя другими нашими статьями:
— Что такое параметры настройки ПИД-регулятора?
– Настройка ПИД-регулятора | Как настроить ПИД-регулятор
Сводка
Хорошо,… давайте повторим:
– Контроллер ВКЛ/ВЫКЛ или Bang-Bang имеет только два выходных состояния и резко переключается между этими двумя состояниями.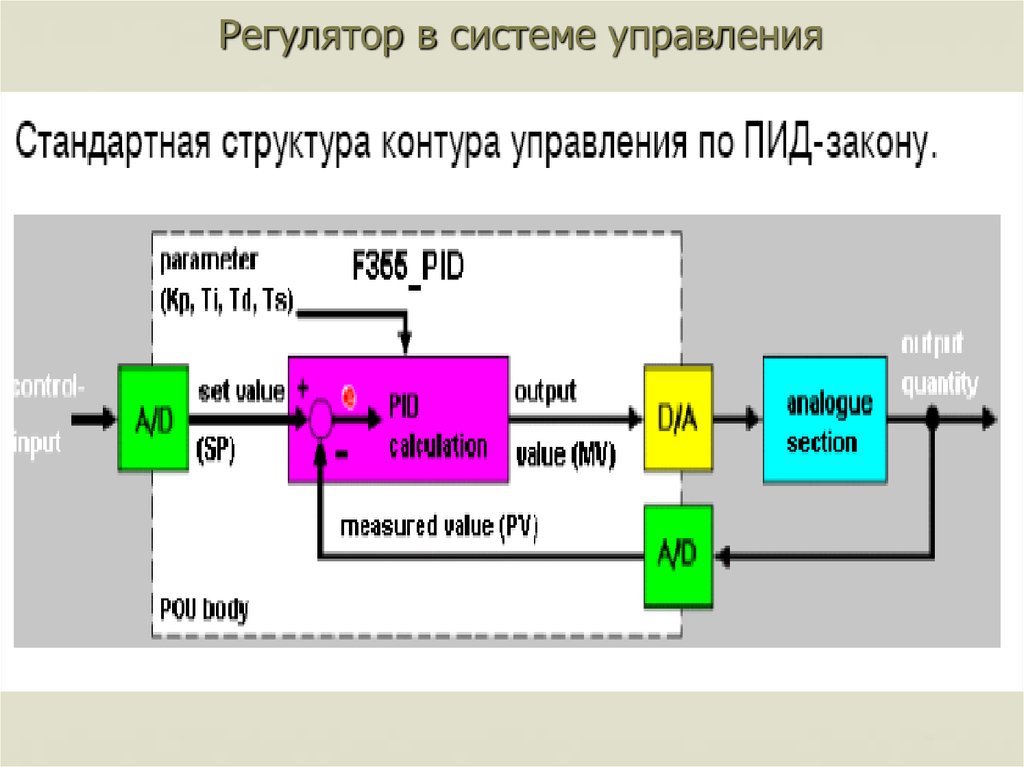
Похожие записи
-

 Uv 5r рация: Рация Baofeng UV-5R купить по лучшей цене с доставкой по России
Uv 5r рация: Рация Baofeng UV-5R купить по лучшей цене с доставкой по России - Xiaomi miija anti blue ray: Компьютерные очки Xiaomi Mijia Anti-Blue Glasses
- Xduoo link: Свежий взгляд на мобильный ЦАП xDuoo Link / Hi-Fi и цифровой звук / iXBT Live
- Алиэкспресс трек номер: Отслеживание посылок с Aliexpress по номеру отслеживания