Пид регулятор что это такое: ПИД регулятор
Содержание
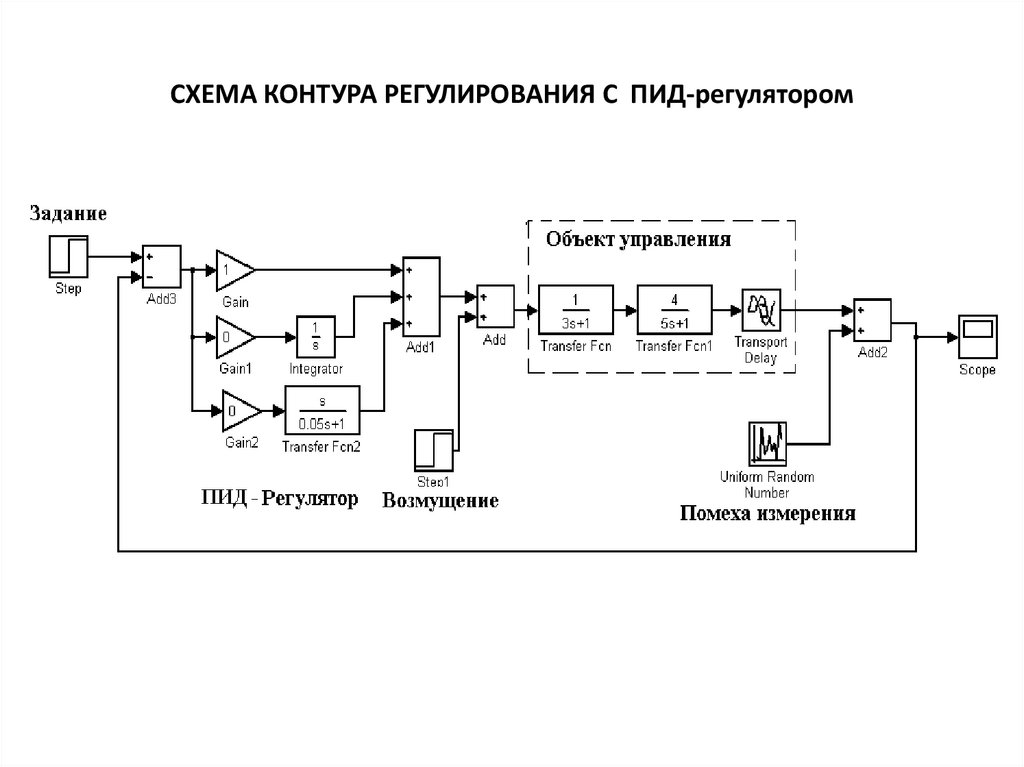
принцип работы, схемы, примеры и т.д.
ПИД-регулятор — это прибор для управления технологическим процессом, который используется в методе ПИД-регулирования, основанном на трех законах регулирования: пропорциональном, интегральном и дифференциальном.
ПИД-регулятор
Обратите внимание на теорию автоматического регулирования и на приборы для регулирования.
Принцип действия ПИД-регулятора
Интегральный сильфон и переменное ограничение позволяет обеспечить интегральное регулирование. Два дифференциальных сильфона и другое переменное ограничение дает возможность регулятору осуществлять дифференциальное регулирование.
Если выход увеличивается, то входной сильфон и нижний дифференциальный сильфон расширяются. Верхний дифференциальный сильфон расширяется позднее из-за переменного ограничения. Балансир поворачивается, и выход немедленно повышается.
Когда входной сигнал полностью перетечет в верхний дифференциальный сильфон, этот сильфон приложит силу, которая уничтожит силу, приложенную нижним дифференциальным сильфоном. На этой точке дифференциальное регулирование прекращается. В то же время, когда это происходит, сильфон обратной связи расширяется в результате изменения выхода. Изменение выхода подается на интегральный сильфон, который вызывает силу, стремящуюся удержать клапан ближе к соплу. Это действие держит выход на высоком уровне в течение времени, когда переменная процесса не равна уставке. Выход будет продолжать увеличиваться до тех пор, пока переменная процесса не вернется в заданному значению уставки.
На этой точке дифференциальное регулирование прекращается. В то же время, когда это происходит, сильфон обратной связи расширяется в результате изменения выхода. Изменение выхода подается на интегральный сильфон, который вызывает силу, стремящуюся удержать клапан ближе к соплу. Это действие держит выход на высоком уровне в течение времени, когда переменная процесса не равна уставке. Выход будет продолжать увеличиваться до тех пор, пока переменная процесса не вернется в заданному значению уставки.
Где применяется ПИД-регулятор
ПИД-регулятор будет хорошим выбором для работающей на газе печи для подогрева нефти, потому что последующий процесс, куда поступает подогретая нефть, допускает лишь очень маленькие отклонения температуры нефти от заданного значения, а большие запаздывания в процессе подогрева делают очень трудной задачу определения и устранения отклонений.
Газовая печь для подогрева нефти
Одна из причин запаздывания — емкость. Печь имеет способность сохранять большое количество тепла внутри своих стенок. Накопленная теплота передается к нефти, но передача не происходит мгновенно. Если внутренние стенки нагреты слишком сильно, потребуется некоторое время для понижения их температуры, в течение которого нефть может быть перегрета. Если внутренние стенки не достаточно нагреты, то нефть может не получить достаточно тепла.
Накопленная теплота передается к нефти, но передача не происходит мгновенно. Если внутренние стенки нагреты слишком сильно, потребуется некоторое время для понижения их температуры, в течение которого нефть может быть перегрета. Если внутренние стенки не достаточно нагреты, то нефть может не получить достаточно тепла.
Дифференциальная составляющая ПИД-регулятора помогает преодолевать запаздывания посредством выработки эффективных упреждающих воздействий. Интегральная составляющая непрерывно корректирует выходной сигнал при наличии смещения пока регулируемая температура не возвращается к уставке.
Двухпозиционное регулирование
регулирование, при котором регулирующий орган перемещается из одного крайнего положения в другое и обратно: включено или выключено
Дифференциальное регулирование
выработка составляющей выходного сигнала регулятора в зависимости от скорости отклонения регулируемой переменной
Интегральное регулирование
формирует регулирующее воздействие пропорционально интегралу отклонения регулируемой величины так долго, пока существует отклонение
Пропорциональное регулирование
способ регулирования, при котором характеристики выходного сигнала пропорциональны характеристикам входного сигнала
Исполнительный механизм
устройство, преобразующее выходной сигнал регулятора в перемещение регулирующего органа
регулятор | это.
 .. Что такое ПИД-регулятор?
.. Что такое ПИД-регулятор?
Схема, иллюстрирующая принцип работы ПИД-регулятора. Коэффициенты перед интегралом и производной опущены для большей наглядности иллюстрации.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п.
Содержание
|
 1 Пропорциональная составляющая
1 Пропорциональная составляющаяОбщие сведения
Пропорциональная составляющая
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к заданной, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления, при наличии задержек в системе, могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Интегральная составляющая
Интегральная составляющая пропорциональна интегралу от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку.
Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая. Тем не менее, интегральная составляющая также может приводить к автоколебаниям.
Дифференциальная составляющая
Дифференциальная составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему.
Теория
Назначение ПИД-регулятора — в поддержании заданного значения x0 некоторой величины x с помощью изменения другой величины u. Значение x0 называется заданным значением, а разность e = (x0 − x) — невязкой, рассогласованием или отклонением величины от заданной.
Выходной сигнал регулятора u определяется тремя слагаемыми:
- ,
где Кp, Кi, Кd — коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих регулятора, соответственно.
Большинство методов настройки ПИД-регуляторов используют несколько иную формулу для выходного сигнала, в которой на пропорциональный коэффициент усиления умножены также интегральная и дифференциальная составляющие:
В дискретной реализации метода расчета выходного сигнала уравнение принимает следующую форму:
- ,
где — время дискретизации. Используя замену можно записать:
В программной реализации для оптимизации расчетов переходят к рекуррентной формуле:
Система управления с обратной связью с участием ПИД-регулятора. Система управляет величиной y(t), т.е. выводит величину y(t) на заданное извне значение u(t). На вход ПИД-регулятора подаётся ошибка e(t), выход ПИД-регулятора является управляющим воздействием для некоторого процесса (для объекта управления), управляющего величиной y(t).
Часто в качестве параметров ПИД-регулятора используются:
- относительный диапазон
- постоянные интегрирования и дифференцирования, имеющие размерность времени
Следует учитывать, что термины используются по-разному в различных источниках и разными производителями регуляторов.
Ссылки
- ПИД-регулирование (ПИД-регулятор) на практических примерах
- Принципы работы ПИД-регуляторов
- Реализация ПИД регулятора на C++
- Перевод статьи «Просто о ПИД-алгоритмах»
ПИД-регулятор
: типы, что это такое и как он работает
text.skipToContent
text.skipToNavigation
Поиск Омега
- Свяжитесь с нами
- Все продукты
Ресурсы
- О нас
- Дом
- См. Ресурсы
- Что такое ПИД-регулятор?
ПИД-регулятор — это инструмент, используемый в приложениях промышленного управления для регулирования температуры, расхода, давления, скорости и других переменных процесса. PID, что означает пропорциональную интегральную производную, контроллеры используют механизм обратной связи контура управления для управления переменными процесса и являются наиболее точными и стабильными контроллерами.
В этой статье более подробно объясняется, как работает PID.
ПИД-регулирование — это хорошо зарекомендовавший себя способ управления системой в направлении целевого положения или уровня. Он практически вездесущ как средство контроля температуры и находит применение во множестве химических и научных процессов, а также в автоматизации. ПИД-регулирование использует обратную связь управления с обратной связью, чтобы фактический выходной сигнал процесса был как можно ближе к целевому или заданному выходному сигналу.
Что такое ПИД-регулятор температуры?
ПИД-регулятор температуры, как следует из его названия, представляет собой прибор, используемый для контроля температуры, в основном без участия оператора. ПИД-регулятор в системе контроля температуры будет принимать датчик температуры, такой как термопара или RD, в качестве входных данных и сравнивать фактическую температуру с желаемой температурой управления или заданным значением. Затем он предоставит вывод элементу управления.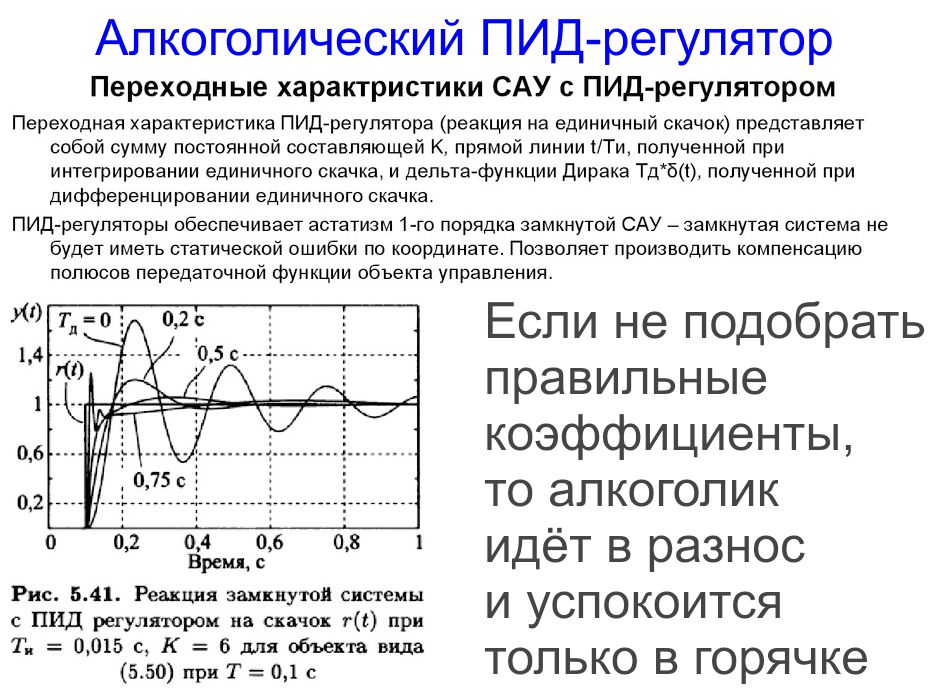
Что такое цифровой ПИД-регулятор?
Цифровой ПИД-регулятор считывает сигнал датчика, обычно с термопары или резистивного датчика температуры, и связывает измерение с техническими единицами, такими как градусы Фаренгейта или Цельсия, которые затем отображаются в цифровом формате.
История ПИД-регулятора
Первая эволюция ПИД-регулятора была разработана в 1911 году Элмером Сперри. Однако только в 1933 году компания Taylor Instrumental Company (TIC) представила первый пневматический контроллер с полностью настраиваемым пропорциональным контроллером. Несколько лет спустя инженеры по системам управления решили устранить стационарную ошибку, обнаруженную в пропорциональных контроллерах, путем сброса точки до некоторого искусственного значения, пока ошибка не равна нулю. Этот сброс «интегрировал» ошибку и стал известен как пропорционально-интегральный регулятор. Затем, в 1940, компания TIC разработала первый пневматический ПИД-регулятор с производным действием, который уменьшил проблемы с перерегулированием. Однако только в 1942 году, когда были введены правила настройки Циглера и Николса, инженеры смогли найти и установить соответствующие параметры ПИД-регуляторов. К середине 1950-х годов автоматические ПИД-регуляторы получили широкое распространение в промышленности.
Однако только в 1942 году, когда были введены правила настройки Циглера и Николса, инженеры смогли найти и установить соответствующие параметры ПИД-регуляторов. К середине 1950-х годов автоматические ПИД-регуляторы получили широкое распространение в промышленности.
Попробуйте все наши новинки!
Узнать больше
Поговорите с нашими экспертами
ПИД-регулятор и объяснение теории
Основная идея ПИД-регулятора состоит в том, чтобы считывать показания датчика, затем вычислять требуемый выходной сигнал привода путем вычисления пропорциональных, интегральных и производных характеристик и суммирования этих трех компонентов для вычисления выходного сигнала. Прежде чем мы начнем определять параметры ПИД-регулятора, мы увидим, что такое система с замкнутым контуром, и некоторые связанные с ней термины.
Прежде чем мы начнем определять параметры ПИД-регулятора, мы увидим, что такое система с замкнутым контуром, и некоторые связанные с ней термины.
Система с замкнутым контуром
В типичной системе управления переменная процесса представляет собой системный параметр, которым необходимо управлять, например, температура (ºC), давление (psi) или скорость потока (литры/мин). Датчик используется для измерения переменной процесса и обеспечения обратной связи с системой управления. Уставка — это желаемое или заданное значение переменной процесса, например 100 градусов Цельсия в случае системы контроля температуры. В любой момент времени разница между переменной процесса и заданным значением используется алгоритмом системы управления 9.0051 (компенсатор) , чтобы определить желаемую выходную мощность привода для управления системой (установкой). Например, если измеренная переменная температуры процесса составляет 100 ºC, а желаемая уставка температуры равна 120 ºC, то выход привода , заданный алгоритмом управления, может управлять нагревателем. Приведение в действие исполнительного механизма для включения нагревателя приводит к тому, что система нагревается, что приводит к увеличению технологической переменной температуры. Это называется системой управления с замкнутым контуром, потому что процесс считывания показаний датчиков для обеспечения постоянной обратной связи и расчета требуемой выходной мощности исполнительного механизма повторяется непрерывно и с фиксированной скоростью цикла, как показано на рисунке 1.9.0003
Приведение в действие исполнительного механизма для включения нагревателя приводит к тому, что система нагревается, что приводит к увеличению технологической переменной температуры. Это называется системой управления с замкнутым контуром, потому что процесс считывания показаний датчиков для обеспечения постоянной обратной связи и расчета требуемой выходной мощности исполнительного механизма повторяется непрерывно и с фиксированной скоростью цикла, как показано на рисунке 1.9.0003
Во многих случаях выход привода — не единственный сигнал, влияющий на систему. Например, в температурной камере может быть источник холодного воздуха, который иногда дует в камеру и нарушает температуру. Такой термин обозначается как возмущение . Обычно мы пытаемся спроектировать систему управления так, чтобы свести к минимуму влияние возмущений на переменную процесса.
Рис. 1: Блок-схема типичной замкнутой системы.
Определение терминов
Процесс разработки системы управления начинается с определения требований к производительности. Производительность системы управления часто измеряется путем применения ступенчатой функции в качестве командной переменной уставки, а затем измерения отклика переменной процесса. Обычно ответ определяется количественно путем измерения определенных характеристик сигнала. Время нарастания — это количество времени, которое требуется системе для перехода от 10% к 90% установившегося или конечного значения. Процент превышения — это величина превышения переменной процесса конечного значения, выраженная в процентах от конечного значения. Время установления — это время, необходимое для того, чтобы переменная процесса установилась в пределах определенного процента (обычно 5 %) от конечного значения. Установившаяся ошибка — это окончательная разница между переменной процесса и заданным значением. Обратите внимание, что точное определение этих величин будет различаться в промышленности и научных кругах.
Производительность системы управления часто измеряется путем применения ступенчатой функции в качестве командной переменной уставки, а затем измерения отклика переменной процесса. Обычно ответ определяется количественно путем измерения определенных характеристик сигнала. Время нарастания — это количество времени, которое требуется системе для перехода от 10% к 90% установившегося или конечного значения. Процент превышения — это величина превышения переменной процесса конечного значения, выраженная в процентах от конечного значения. Время установления — это время, необходимое для того, чтобы переменная процесса установилась в пределах определенного процента (обычно 5 %) от конечного значения. Установившаяся ошибка — это окончательная разница между переменной процесса и заданным значением. Обратите внимание, что точное определение этих величин будет различаться в промышленности и научных кругах.
Рис. 2: Отклик типичной замкнутой системы ПИД-регулятора.
После использования одной или всех этих величин для определения требований к характеристикам системы управления полезно определить наихудшие условия, при которых ожидается, что система управления будет соответствовать этим проектным требованиям. Часто в системе возникает возмущение, которое влияет на переменную процесса или измерение переменной процесса. Важно разработать систему управления, которая удовлетворительно работает в наихудших условиях. Мера того, насколько хорошо система управления способна преодолевать последствия возмущений, называется 9.0051 Подавление помех системы управления.
В некоторых случаях реакция системы на заданный управляющий выход может меняться со временем или в зависимости от какой-либо переменной. Нелинейная система представляет собой систему, в которой параметры управления, дающие желаемую реакцию в одной рабочей точке, могут не дать удовлетворительной реакции в другой рабочей точке. Например, камера, частично заполненная жидкостью, будет демонстрировать гораздо более быструю реакцию на мощность нагревателя, когда она почти пуста, чем когда она почти заполнена жидкостью.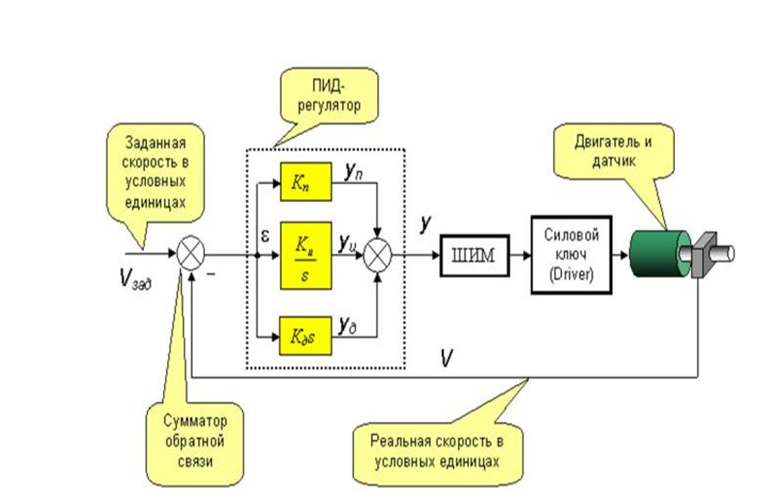 Мера того, насколько хорошо система управления будет выдерживать помехи и нелинейности, называется надежность системы управления.
Мера того, насколько хорошо система управления будет выдерживать помехи и нелинейности, называется надежность системы управления.
Некоторые системы демонстрируют нежелательное поведение, называемое временем простоя . Мертвое время — это задержка между изменением переменной процесса и моментом, когда это изменение можно наблюдать. Например, если датчик температуры расположен далеко от впускного клапана для холодной воды, он не будет измерять изменение температуры немедленно, если клапан открыт или закрыт. Время простоя также может быть вызвано системой или выходным приводом, который медленно реагирует на управляющую команду, например, клапан, который медленно открывается или закрывается. Распространенным источником простоя на химических заводах является задержка, вызванная потоком жидкости по трубам.
Цикл цикла также является важным параметром замкнутой системы. Интервал времени между вызовами алгоритма управления является временем цикла цикла.
