Интерфейс 485 для болид: Организация канала интерфейса RS-485
Содержание
Трансляция RS-485 интерфейса по стандартным цифровым каналам связи в потоке Е1 при помощи мультиплексоров «ГМ-2» фирмы «Зелакс»
Были проведены испытания системы «Орион» с применением мультиплексоров ГМ-2 фирмы Зелакс для передачи сообщений по цифровому каналу связи в потоке Е1 между компьютером с АРМ «Орион»/АРМ «Орион Про» или пультом С2000 и удаленными приборами системы.
Целью испытаний была проверка возможности передачи извещений с удаленных охраняемых объектов, оборудованных приборами системы «Орион», по стандартным цифровым каналам связи (например, по радиорелейным линиям (РРЛ) ) на пульт С2000 или ППЭВМ с установленным автоматизированным рабочим местом (АРМ «Орион»/АРМ «Орион Про») с использованием мультиплексоров фирмы Зелакс.
При проведении испытаний применялось следующее оборудование:
- Мультиплексоры ГМ-2 фирмы Зелакс.
- Преобразователь интерфейсов RS232-RS485 С2000-ПИ.
- Компьютер Pentium III-530Mhz/Ram 128Mb с Microsoft Windows 2000.

- Приборы системы «Орион»: С2000-АСПТ, С2000-КДЛ, С2000-АР8, С2000-СП2.
- АРМ Орион.
- Контрольный пульт С2000.

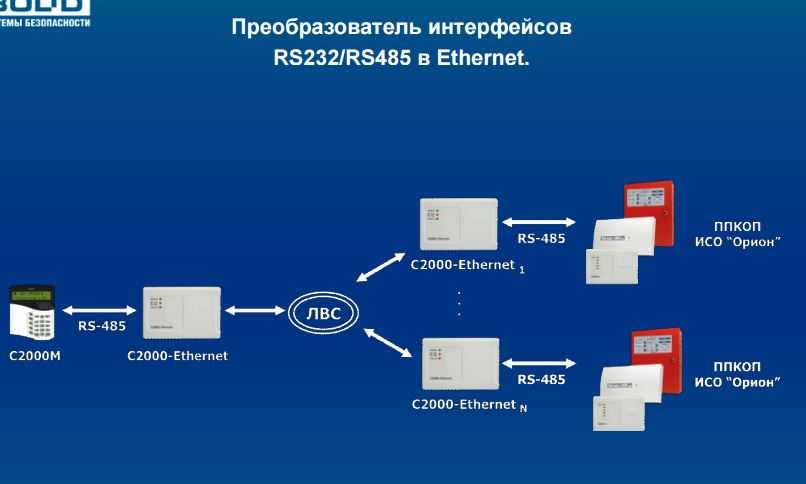
Структура системы при этом выглядит следующим образом:
АПД — аппаратура передачи данных; С2000 — пульт контроля и управления;
С2000-ПИ — преобразователь интерфейсов RS-232/RS-485.
Способ передачи в системе от пульта к приборам и обратно полудуплексный, скорость передачи 9600 бит/с, один старт бит, длина посылки 8 бит, один стоп бит, без контроля четности.
Ключевым фактором, обеспечивающим работоспособность данной системы, является увеличение в С2000 таймаута на ожидание ответа от прибора (учитывая задержки, вносимые мультиплексорами).
Для применения в этой системе пульта С2000 необходима новая версия пульта 1.21 с программируемыми таймаутами. Подключаться к мультиплексору он должен через преобразователь интерфейса с автоматическим переключением направления передачи «С2000- ПИ».
При этом снижается количество опросов, проводимых пультом за одну секунду. Эксперимент по проверке функционирования данной системы проводился с проводным каналом связи между мультиплексорами (Е1, 2,048 Мбит/с).
Ниже приведены результаты проведенных испытаний.
Структурные схемы включения приборов макетной системы:
Схема 1:
Схема 2:
Схема 3:
Компьютер был подключен к мультиплексору с использованием преобразователей интерфейса С2000-ПИ (RS-232/RS-485). Мультиплексоры были соединены посредством четырехпроводного кабеля (интерфейс Е1). С соответствующего канала второго мультиплексора, используя преобразователь интерфейса С2000-ПИ были подключены приборы системы «Орион»: С2000-АСПТ, С2000-КДЛ, С2000-СП2, С2000-АР8. Также подключалась вторая ветка приборов через интерфейс RS-485. В схеме 2 испытания проводились с подключением промежуточного мультиплексора ГМ-2 (ремультиплексирование ).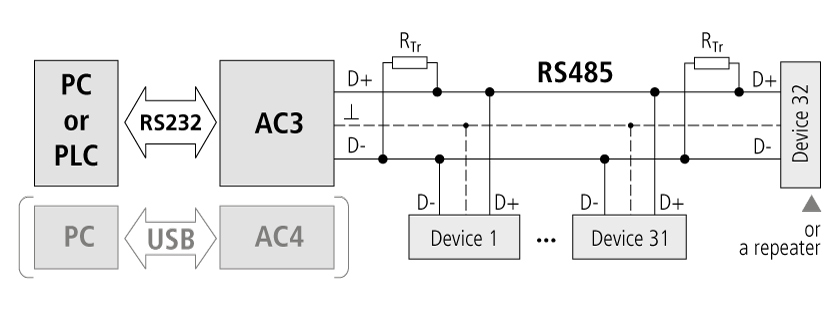 Также были проведены испытания с использованием контрольного пульта С2000 (Схема 3).
Также были проведены испытания с использованием контрольного пульта С2000 (Схема 3).
Испытания были проведены для двух режимов передачи данных мультиплексоров (ГМ- 2, Зелакс) с субдискретизацией и пакетном режиме работы.
В АРМ «Орион» был установлен стандартный таймаут 30 мс на ожидание ответа от прибора.
Правильно собранная схема сразу является работоспособной. При работе АРМ «Орион»/АРМ «Орион Про» обеспечивает передачу команд и проводит опрос событий от приборов со скоростью до 27 опросов в секунду (вполне достаточно для охранно-пожарной сигнализации).
При уменьшении таймаута опроса до 25 мс начались сбои при поиске и опросе устройств, подключенных через мультиплексор.
В ходе испытаний изменялись настройки таймаутов для опроса устройств АРМ Орион в реестре с помощью стандартной программы Regedit: HKEY_LOCAL_MACHINE\SOFTWARE\BOLID\ORION\RS\TimeoutConstant = 30
HKEY_LOCAL_MACHINE\SOFTWARE\BOLID\ORION\RS\CmdTimeoutConstant = 600
При подключении пульта С2000 версии 1. 21 со стандартными таймаутами (6 мс), ветвь системы с мультиплексорами имела слишком большие задержки и приборы не регистрировались. После увеличения таймаутов до 30 мс система стала работать без пропусков сообщений.
21 со стандартными таймаутами (6 мс), ветвь системы с мультиплексорами имела слишком большие задержки и приборы не регистрировались. После увеличения таймаутов до 30 мс система стала работать без пропусков сообщений.
Выводы
- Испытания подтвердили возможность передачи извещений с удаленных охраняемых объектов, оборудованных приборами системы «Орион», по стандартным цифровым каналам связи в потоке Е1 на пульт С2000 или ППЭВМ с установленным автоматизированным рабочим местом (АРМ «Орион»/АРМ «Орион Про») с использованием мультиплексоров ГМ-2 фирмы Зелакс, при условии несущественных задержек в канале связи, например, при работе в дуплексном режиме.
- Для реализации такой возможности требуется применение преобразователей интерфейса с автоматическим переключением направления передачи и версия АРМ «Орион»/АРМ «Орион Про», которая работает с такими преобразователями.
- При работе через мультиплексоры пульт С2000 или АРМ «Орион»/АРМ «Орион Про» обеспечивает передачу команд и проводит опрос событий от приборов с приемлемой скоростью до 27 опросов в секунду (цикл опроса по магистральной линии RS-485 составляет 37 опросов в секунду).
- При использовании на реальном канале связи задержки возрастут и несколько снизится количество опросов, проводимых пультом или АРМ за одну секунду. Поэтому для уточнения параметров настройки таймаутов в АРМ необходимо провести натурные испытания на реальном канале связи. Однако предполагается, что время доставки сообщений останется на приемлемом уровне.

Преобразователь интерфейсов RS-232/RS-485, повторитель интерфейса RS-485 с гальванической развязкой С2000-ПИ
«С2000-ПИ» предназначен для гальванической изоляции и взаимного преобразования сигналов интерфейса RS-232 и сигналов двухпроводного магистрального интерфейса RS-485.
В ИСО «Орион» используется для подключения приборов к ПК с АРМ «Орион Про» или АРМ «С2000» или для увеличения длины двухпроводного магистрального интерфейса RS-485.
- Описание
- Характеристики
- Скачать
- Цены
- База знаний
- Обсуждение
- Применен в проектах
- Новости
- Каталоги
- Два выхода RS-485 – с гальванической развязкой и без нее
- Удлинение интерфейса RS-485 c гальванической развязкой и защитой от короткого замыкания
- Индикация приема/передачи данных и короткого замыкания линии интерфейса
- Питание «С2000-ПИ» от USB-порта компьютера или от любого внешнего источника постоянного тока напряжением от 10 до 28 В
| НАИМЕНОВАНИЕ ПАРАМЕТРА | ЗНАЧЕНИЕ ПАРАМЕТРА |
|---|---|
| Подключение к ПК | кабель подключения пульта «С2000» к ПЭВМ, поставляется отдельно |
| Тип подключения RS-485 | клеммная колодка под винт, провод 0,2 до 2 кв. мм мм |
| Расстояние от «С2000-ПИ» до приборов ИСО «Орион» (во всех режимах работы) | при скорости передачи данных 115200 бит/с — до 1 км, при скорости 9600 бит/с – до 1,5 км |
| Индикация | 1 индикатор режимов работы, 3 индикатора приема/передачи данных по интерфейсам |
| Питание прибора | вар. 1 — от USB-порт компьютера по кабелю из комплекта поставки вар. 2 — от внешнего источника постоянного тока напряжением от +10,0 до +28,0 В |
| Ток потребления | не более 160 мА при питании от компьютера не более 120 мА при питании от источника +12 В не более 60 мА при питании от источника +24 В |
| Тип обмена данными | полудуплексный |
| Скорость передачи данных | 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200 бит/с |
| Электрическая прочность изоляции | до 1600 В в течение 1 минуты или до 2000 В в течение 1 с |
| Рабочий диапазон температур | от минус 40 до +55 °C |
| Масса, не более | 0,2 кг |
| Габаритные размеры | 102x107x39 мм |
| Тип крепления | настенный навесной или на DIN -рейку |
| Степень защиты | IP40 |
Обсудить на форуме
Опросы » Модернизация корпуса С2000-Ethernet, С2000-ПИ, С2000-СП2, МИП12, БЗС, С2000Р-АРР32
05 декабря 2022|Гулюгин Александр (Королев)
Ещё. ..
..
Вы можете задать вопрос в техподдержку.
Также можете оставить отзыв на продукт: пожаловаться, поблагодарить, предложить идею.
Объяснение последовательного интерфейса
RS-485 | Устройства CUI
В мире доступных последовательных интерфейсов может быть трудно понять их различия и понять, когда использовать каждый из них. Как всегда говорил мой любимый профессор инженерного дела: «Прелесть стандартов в том, что их так много на выбор». Сегодняшние энкодеры умнее и совершеннее, чем когда-либо прежде, что требует от инженеров отказа от более простых квадратурных инкрементных датчиков и внедрения высокоскоростных абсолютных энкодеров с последовательными интерфейсами. А для промышленных приложений не все последовательные интерфейсы одинаковы. Соответствуя требованиям как высокой скорости, так и промышленной надежности, последовательный интерфейс RS-485 стал широко используемым интерфейсом для поворотных энкодеров и другого оборудования управления движением.
Что такое RS-485?
RS-485 — это промышленная спецификация, определяющая электрический интерфейс и физический уровень для двухточечной связи электрических устройств. Стандарт RS-485 позволяет прокладывать кабели на большие расстояния в средах с электрическими помехами и может поддерживать несколько устройств на одной шине.
Когда, зачем и где использовать RS-485
RS-485 использовался в широком спектре систем компьютерной автоматизации еще с момента создания стандарта в 1998. Благодаря тому, что стандарт допускает многоточечность (несколько устройств на одной шине) и большую длину кабелей, легко понять его частое использование в промышленных и автоматизированных помещениях. RS-485 также можно найти в театральных приложениях, где множество устройств разбросаны по огромному пространству.
Кроме того, помехоустойчивость, обеспечиваемая стандартом RS-485, делает интерфейс очень универсальным. Инженеры не только используют его для прокладки кабелей на большие расстояния, но и внедряют его в такие приложения, как автомобильная промышленность, где неясно, какой шум может возникнуть в конечном приложении. Возможность использования RS-485 на высоких скоростях, при длинных кабелях, в средах с электрическими помехами и с несколькими устройствами на одной шине делает его интеллектуальной реализацией для большинства приложений, требующих последовательного интерфейса.
Возможность использования RS-485 на высоких скоростях, при длинных кабелях, в средах с электрическими помехами и с несколькими устройствами на одной шине делает его интеллектуальной реализацией для большинства приложений, требующих последовательного интерфейса.
Стандарт RS-485
RS-485, также известный как TIA-485 или EIA-485, — это стандарт, определяющий электрические характеристики драйверов и приемников для протокола связи. Модель взаимодействия открытых систем (OSI) пытается охарактеризовать различные уровни системы связи от конечного приложения, вниз через электрические уровни и, наконец, на физический уровень, рисунок 1.
Рисунок 1: Модель взаимодействия открытых систем (OSI)
Физический уровень модели OSI
Физический уровень модели OSI отвечает за передачу необработанных данных между устройством и физической средой передачи. Он обрабатывает преобразование электрических сигналов в цифровые данные, а также определяет напряжение, синхронизацию, скорость передачи данных и т. д.
д.
RS-485 использует две сигнальные линии, «A» и «B», которые должны быть балансными и дифференциальными. Сбалансированные сигналы представляют собой две линии, которые разделяют пару в кабеле с витой парой с одинаковым импедансом на каждой линии. Наряду с согласованным импедансом линий также должны быть согласованы импедансы приемника и передатчика. На рис. 2 показана типичная многоабонентская сеть RS-485, в которой каждое устройство имеет дифференциальный приемопередатчик RS-485, а связь между устройствами состоит из витой пары и оконечных резисторов.
Обратите внимание, что существуют различные топологии, которые можно использовать для размещения устройств, поскольку не все сети созданы одинаковыми, а требования к терминации, а также расположение устройств могут различаться. Например, на рис. 2 ниже заделка используется только в начале и конце кабеля.
Рис. 2: Типичная топология сети RS-485
Балансное подключение позволяет уменьшить шум при использовании дифференциальных сигналов. Эти сигналы «А» и «В» называются дифференциальной парой; один из сигналов соответствует исходному сигналу, а другой полностью инвертирован, поэтому его иногда называют дополнительным сигналом.
Эти сигналы «А» и «В» называются дифференциальной парой; один из сигналов соответствует исходному сигналу, а другой полностью инвертирован, поэтому его иногда называют дополнительным сигналом.
В несимметричном интерфейсе приемник соотносит сигнал с землей и определяет состояние сигнала на основе заданных уровней напряжения (они называются логическими уровнями, поскольку они определяют, является ли сигнал высоким или низким). Однако на больших расстояниях, где напряжение имеет тенденцию к падению, а скорость нарастания уменьшается, часто возникают ошибки сигнала. В дифференциальном приложении хост генерирует исходный несимметричный сигнал, который затем поступает на дифференциальный передатчик. Этот передатчик создает дифференциальную пару для передачи по кабелю. При генерировании двух сигналов приемник больше не соотносит уровень напряжения с землей, а вместо этого соотносит сигналы друг с другом. Это означает, что вместо того, чтобы искать определенные уровни напряжения, приемник всегда смотрит на разница между двумя сигналами.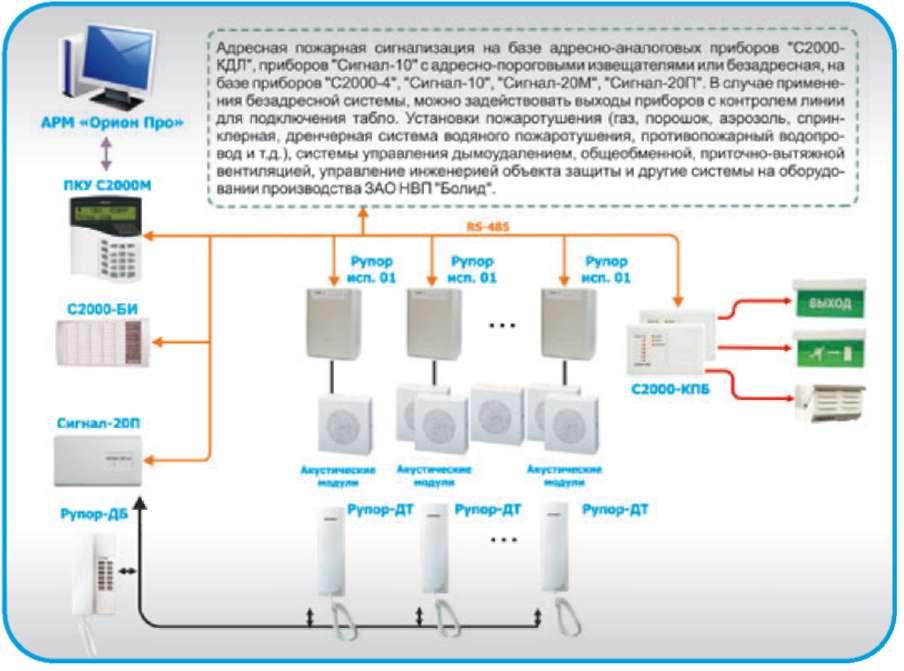 Затем дифференциальный приемник реконструирует пару сигналов обратно в один несимметричный сигнал, который может быть интерпретирован хост-устройством с использованием соответствующих логических уровней, требуемых хостом, рис. 3. Этот тип интерфейса также позволяет работать устройствам с разными уровнями напряжения. вместе посредством связи между дифференциальными трансиверами. Все это работает вместе, чтобы преодолеть ухудшение сигнала, которое могло бы произойти с несимметричным приложением при больших расстояниях кабеля.
Затем дифференциальный приемник реконструирует пару сигналов обратно в один несимметричный сигнал, который может быть интерпретирован хост-устройством с использованием соответствующих логических уровней, требуемых хостом, рис. 3. Этот тип интерфейса также позволяет работать устройствам с разными уровнями напряжения. вместе посредством связи между дифференциальными трансиверами. Все это работает вместе, чтобы преодолеть ухудшение сигнала, которое могло бы произойти с несимметричным приложением при больших расстояниях кабеля.
Рисунок 3: Выходной сигнал энкодера, управляемый дифференциальным драйвером и реконструированный приемником
Ухудшение сигнала — не единственная проблема, возникающая при прокладке больших расстояний. Чем длиннее кабели внутри системы, тем выше вероятность того, что электрические шумы и помехи попадут на кабели и, в конечном счете, в электрическую систему. Когда шум проникает в кабель, он проявляется в виде напряжения различной величины, но преимущество использования сбалансированного кабеля с витой парой заключается в том, что шум попадает в кабель одинаково на каждой линии. Например, положительный всплеск в 1 вольт приведет к +1 В на A и +1 В на B. Поскольку дифференциальный приемник вычитает сигналы друг из друга, чтобы получить восстановленный сигнал, он будет игнорировать шум, показанный одинаково на обоих проводах. , Рисунок 4. Способность дифференциального приемника игнорировать напряжения, одинаковые на обеих сигнальных линиях, называется подавлением синфазного сигнала.
Например, положительный всплеск в 1 вольт приведет к +1 В на A и +1 В на B. Поскольку дифференциальный приемник вычитает сигналы друг из друга, чтобы получить восстановленный сигнал, он будет игнорировать шум, показанный одинаково на обоих проводах. , Рисунок 4. Способность дифференциального приемника игнорировать напряжения, одинаковые на обеих сигнальных линиях, называется подавлением синфазного сигнала.
Рисунок 4: Дифференциальный приемник, игнорирующий шум, общий для обоих сигналов
Одним из других основных преимуществ физического уровня RS-485 является спецификация напряжения сигнала. RS-485 не требует использования определенного напряжения на шине, а вместо этого указывает минимальное требуемое дифференциальное напряжение, которое представляет собой разность между напряжениями сигналов A и B. Для шины требуется минимальное дифференциальное напряжение +/- 200 мВ на приемнике, и, как правило, все устройства RS-485 будут иметь одинаковый диапазон входного напряжения, несмотря на передачу при различных напряжениях.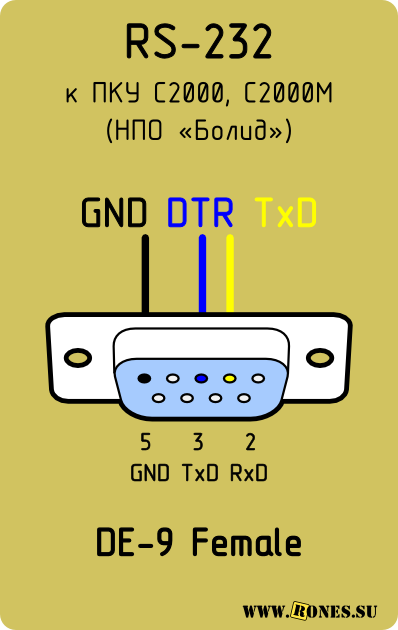 Это означает, что любое устройство RS-485 способно принимать напряжение в диапазоне от -7 до 12 В, поэтому инженер может спроектировать хост-систему с любым напряжением передачи в этом диапазоне. Это позволяет разработчикам создавать системы RS-485, используя существующие напряжения на плате.
Это означает, что любое устройство RS-485 способно принимать напряжение в диапазоне от -7 до 12 В, поэтому инженер может спроектировать хост-систему с любым напряжением передачи в этом диапазоне. Это позволяет разработчикам создавать системы RS-485, используя существующие напряжения на плате.
При этом важно проверить спецификации продукта, чтобы убедиться, что устройство поддерживает полный диапазон напряжения стандарта. Например, энкодеры RS-485 компании CUI Devices используют 3,3 В на плате, поэтому они используют передатчик RS-485 3,3 В. Тем не менее, они также устойчивы к входному напряжению в диапазоне от 0 до 12 В. Это позволяет им без проблем использовать одну и ту же шину RS-485 при нескольких различных напряжениях передачи в диапазоне от 0 до 12 В, если минимальное дифференциальное напряжение составляет +/- 200 мВ. как на приемнике, так и на передатчике. Это особенно важно, потому что с увеличением длины кабеля падает напряжение на сигнальных линиях. Хост-устройство может передавать с дифференциальным напряжением +/- 1 В, но при большой длине кабеля это напряжение может уменьшиться до +/- 200 мВ, что вполне приемлемо для RS-485, рис. 5.9.0003 Рисунок 5: Минимальные уровни сигналов шины RS-485 Рисунок 6: Модель OSI с определенным физическим уровнем . RS-485 чаще всего используется как полудуплекс, как показано на рисунках выше, только с одной линией связи («A» и «B» как пара). В полудуплексном режиме устройства по очереди используют одну и ту же линию, где хост устанавливает контроль над шиной и отправляет команду всем остальным прослушивающим устройствам. Предполагаемый получатель будет прослушивать свой адрес, а затем это устройство установит контроль и ответит. И наоборот, в полнодуплексной системе, такой как последовательный периферийный интерфейс (SPI) или универсальный асинхронный приемник-передатчик (UART), хост и ведомые устройства могут обмениваться данными одновременно, используя выделенные входные и выходные линии.
5.9.0003 Рисунок 5: Минимальные уровни сигналов шины RS-485 Рисунок 6: Модель OSI с определенным физическим уровнем . RS-485 чаще всего используется как полудуплекс, как показано на рисунках выше, только с одной линией связи («A» и «B» как пара). В полудуплексном режиме устройства по очереди используют одну и ту же линию, где хост устанавливает контроль над шиной и отправляет команду всем остальным прослушивающим устройствам. Предполагаемый получатель будет прослушивать свой адрес, а затем это устройство установит контроль и ответит. И наоборот, в полнодуплексной системе, такой как последовательный периферийный интерфейс (SPI) или универсальный асинхронный приемник-передатчик (UART), хост и ведомые устройства могут обмениваться данными одновременно, используя выделенные входные и выходные линии.
На уровне данных RS-485 обычно использует UART для последовательной связи, когда главный UART управляет и принимает последовательную связь в полнодуплексном режиме. Он подключен к дифференциальному приемопередатчику RS-485, который образует физический уровень и преобразует сигналы в полудуплексный дифференциальный формат для использования на шине RS-485. Затем хост свяжется с RS-485 через UART и сообщит трансиверу, когда переключаться между передачей и приемом. Ведомые устройства также будут использовать свой UART таким же образом.
Затем хост свяжется с RS-485 через UART и сообщит трансиверу, когда переключаться между передачей и приемом. Ведомые устройства также будут использовать свой UART таким же образом.
UART, имеющий выделенные линии передачи и приема, позволяет ему работать в полнодуплексном, полудуплексном или даже симплексном режимах, что означает, что данные всегда передаются и поступают только по одной линии. Поскольку RS-485 обычно является полудуплексным, подключенный к нему UART также будет работать в полудуплексном режиме.
Рисунок 7: Обычное использование UART для RS-485
Интерфейс UART является асинхронным, что означает, что связь не включает часы. Главное и подчиненное устройства должны использовать свои собственные внутренние часы, и оба устройства должны знать, с какой тактовой частотой будут передаваться данные. Это отличается от синхронной системы, такой как последовательный периферийный интерфейс (SPI), где одна из сигнальных линий содержит часы, по которым прослушивающее устройство на шине может захватывать данные.
Кроме того, UART обычно имеет обычный формат , который будет использовать большинство устройств, но многие параметры можно настроить для изменения нормы. В состоянии простоя UART находится под высоким напряжением, поэтому для начала передачи UART использует низкий импульс, называемый стартовым битом, за которым следуют 8 бит данных, и завершается высоким стоповым битом, рис. 8.
Рис. 8: кадрирование данных UART
Хост-процессор будет использовать вывод ввода-вывода для перевода приемопередатчика RS-485 в режим передачи и пошлет байт из линии TX UART в линию данных (D или DI) приемопередатчика RS-485. Приемопередатчик преобразует несимметричный битовый поток UART в дифференциальный битовый поток на линиях A и B, рис. 3. Сразу после того, как данные покидают приемопередатчик, хост переключает приемопередатчик в режим приема. Ведомая система идентична, что означает, что ведомый приемопередатчик RS-485 принимает входящий поток битов, преобразует его в несимметричный сигнал и отправляет его на главное устройство через линию приема UART ведомого устройства.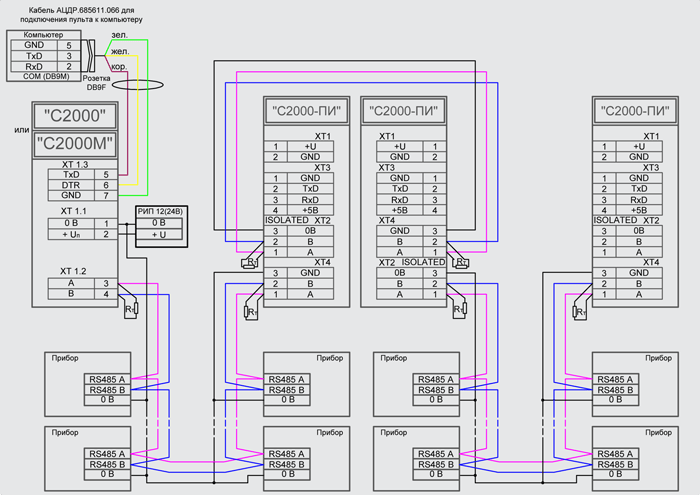 Когда ведомое устройство готово ответить, оно передает так же, как изначально делал хост, в то время как хост теперь получает, рис. 9.
Когда ведомое устройство готово ответить, оно передает так же, как изначально делал хост, в то время как хост теперь получает, рис. 9.
Рисунок 9: Хост отправляет команду через шину RS-485, а ведомое устройство отвечает Рисунок 10: Модель OSI с определенным уровнем канала передачи данных автобус. Поскольку RS-485 — это в основном электрическая спецификация, на этом разговор можно было бы закончить, но, поскольку он поддерживает многоабонентскую связь, необходимо учесть его в модели OSI.
Не существует установленной спецификации для адресации сетевого уровня, но мастер должен надлежащим образом управлять шиной RS-485, чтобы избежать коллизий шин. Коллизии шины происходят, когда несколько устройств пытаются обмениваться данными одновременно, что может быть очень вредным для сети. Когда происходят коллизии, передатчики конфликтуют на обоих концах, и фактически оба создают короткие замыкания. Это приводит к тому, что каждое устройство потребляет большое количество тока, что может привести к отключению трансивера из-за перегрева.
Чтобы избежать коллизий, мастер управляет шиной и звонит отдельным устройствам. Чаще всего это достигается за счет наличия набора команд, который распознают только определенные устройства, или за счет наличия определенных адресов для каждого устройства. Поскольку шина является общей для всех устройств, каждое устройство увидит команду/адрес, отправляемые ведущим, но ответит только тогда, когда это отдельное устройство будет подтверждено.
Рисунок 11: Модель OSI с определенным сетевым уровнем
Прикладной уровень модели OSI
Модель OSI — это не набор правил, а скорее модель, помогающая инженерам характеризовать системы. RS-485 хорошо вписывается в первые три уровня модели OSI, а фактическая реализация шины определяется на прикладном уровне. Этот уровень охватывает адреса или наборы команд, используемые устройствами, а также интерпретацию данных. Это также включает в себя то, сколько данных разработчик может получить обратно, и управление самой шиной.
Например, приложение для кодировщика CUI Devices RS-485 будет хостом, запрашивающим абсолютное положение от устройства.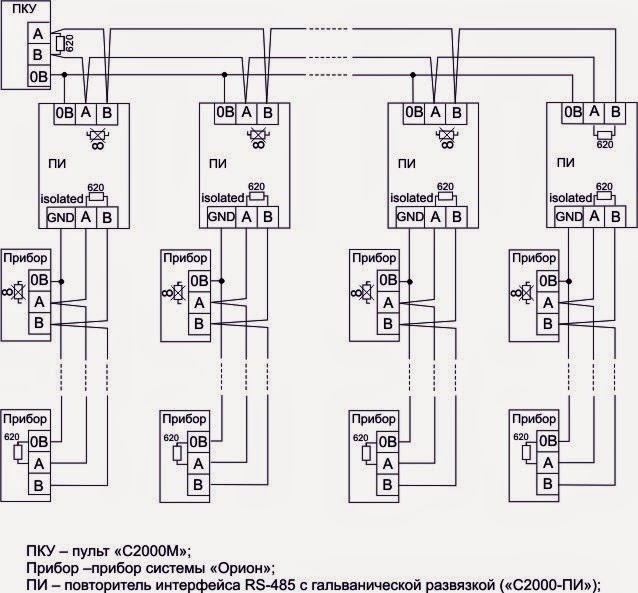 Когда хост отправляет команду положения энкодера (адрес), энкодер отвечает двумя полными байтами. Затем хост расшифровывает эти байты, чтобы понять, что такое абсолютная позиция, при этом определяя, как часто отправлять команды и на какие устройства он хочет их отправлять. Проще говоря, прикладной уровень — это 9-й уровень.0029 реализация шины RS-485.
Когда хост отправляет команду положения энкодера (адрес), энкодер отвечает двумя полными байтами. Затем хост расшифровывает эти байты, чтобы понять, что такое абсолютная позиция, при этом определяя, как часто отправлять команды и на какие устройства он хочет их отправлять. Проще говоря, прикладной уровень — это 9-й уровень.0029 реализация шины RS-485.
Поскольку стандарт RS-485 определяет только физический уровень и уровень канала передачи данных с требованием адресации, прикладной уровень может использовать различные проприетарные или открытые протоколы связи. Инженеры могут использовать существующие протоколы, такие как Modbus, или они могут определить свои собственные для своего приложения. Например, кодировщики CUI Devices используют очень упрощенную структуру адресации для подтверждения устройств, что обеспечивает быстрое выполнение и минимальное время обработки. Адрес каждого энкодера — это только шесть старших битов в байте, а младшие два бита — это команда. Это позволяет энкодеру начать свой ответ после получения всего одного байта от ведущего устройства, что обеспечивает малое время обработки, что имеет решающее значение в приложениях управления движением.
Рис. 12. Полное определение модели OSI
Кодировщики RS-485 устройств CUI
Кодировщики RS-485 устройств CUI
используют протокол быстрого позиционирования, который позволяет кодировщику отвечать положением в течение времени, равного байту. Как описано выше, этот формат поддерживает 64 уникальных адреса кодировщика. Адрес энкодера — это старшие 6 бит в байте, а младшие 2 бита — это команда. Эти адреса настраиваются с помощью программного обеспечения CUI Devices AMT Viewpoint™ и модуля программирования. Эти энкодеры имеют различные команды в зависимости от их версии, при этом все устройства поддерживают расширенные команды, такие как сброс или установка нулевой позиции.
Рис. 13. Формат адресации энкодера RS-485 устройств CUI.
| Младшие два бита | Шестнадцатеричный | Команда |
|---|---|---|
| 00 | 0x00 | Чтение позиции |
| 01 | 0x01 | Чтение счетчика оборотов (только для многооборотных энкодеров) |
| 10 | 0x02 | Указывает расширенную команду |
| 11 | 0x03 | Зарезервировано |
Абсолютные энкодеры устройств CUI имеют разрешение 12 или 14 бит, однако все они отвечают двумя полными байтами на каждый запрос положения.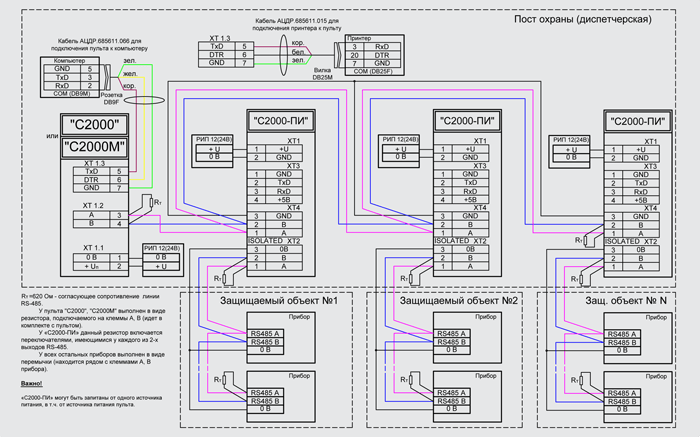 Два полных байта составляют 16 бит, что позволяет кодировщику использовать два старших бита для вычисления контрольной суммы. Эта часть прикладного уровня позволяет хосту проверять данные, передаваемые кодером. Для 12-битных энкодеров передача будет иметь контрольные биты в двух старших битах, причем нижние два бита равны нулю, а 12 битов между ними содержат данные о положении.
Два полных байта составляют 16 бит, что позволяет кодировщику использовать два старших бита для вычисления контрольной суммы. Эта часть прикладного уровня позволяет хосту проверять данные, передаваемые кодером. Для 12-битных энкодеров передача будет иметь контрольные биты в двух старших битах, причем нижние два бита равны нулю, а 12 битов между ними содержат данные о положении.
Эти абсолютные энкодеры также доступны с многооборотной поддержкой, чтобы они могли подсчитывать количество оборотов. Это 14-битный счетчик со знаком, и данные передаются так же, как и позиция с двумя верхними битами, содержащими контрольную сумму. Поскольку счетчик со знаком , он может считать положительные и отрицательные повороты, но за счет одного бита данных. Это означает, что он может считать от -8192 до 8191.
Абсолютные энкодеры устройств CUI также доступны в высокоскоростной версии, работающей на скорости 2 Мбит/с с временем переключения, близким к 3 микросекундам. Однако для приложений, которые не могут справиться с высокими требованиями к скорости и времени, доступны версии с регулируемой скоростью передачи данных.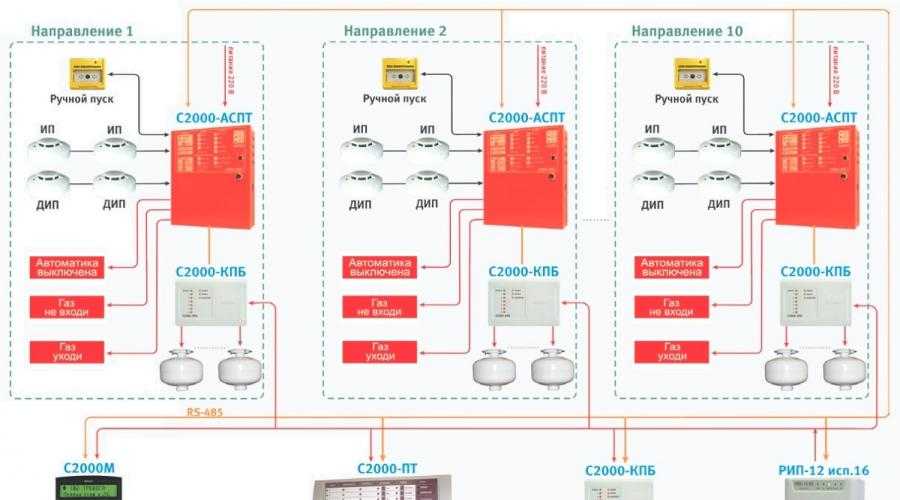 Эти версии дают пользователям возможность выбирать частоты из списка с помощью AMT Viewpoint и модуля программирования, что упрощает реализацию, когда высокая скорость не требуется.
Эти версии дают пользователям возможность выбирать частоты из списка с помощью AMT Viewpoint и модуля программирования, что упрощает реализацию, когда высокая скорость не требуется.
Заключение
Поддерживая высокие скорости, большие расстояния кабелей, устойчивость к электрическим помехам и несколько устройств на одной шине, RS-485 стал популярным последовательным интерфейсом в поворотных энкодерах благодаря своей универсальности в широком диапазоне приложений. Разработчики, желающие использовать энкодеры с интерфейсом RS-485, могут извлечь пользу из понимания деталей, изложенных выше, включая его различные уровни, реализацию и передовой опыт в общесистемной связи. Предлагая дополнительную надежность и промышленную надежность, абсолютные энкодеры AMT на емкостной основе с интерфейсом RS-485 от CUI Devices являются интригующим вариантом для приложений управления движением благодаря их высокой точности, низкому потреблению тока и устойчивости к загрязнениям окружающей среды.
RS-232 и RS-485 | Ресурсы Infosec
Критическая инфраструктура
4 марта 2020 г.
Нитеш Мальвия
Share:
Введение
RS-232 и RS-485 принадлежат к семейству последовательных интерфейсов. Последовательный интерфейс — это коммуникационный интерфейс, в котором данные передаются побитно. Высокое логическое напряжение представлено как «1», а низкое логическое напряжение представлено как «0».
Среди всех последовательных интерфейсов на рынке RS-232 и RS-485 являются старейшими и до сих пор широко используются .
RS-232
RS-232 означает рекомендуемые стандарты 232. Он был создан в 1960 году Ассоциацией электронной промышленности (EIA) и широко используется для соединения компьютеров и их периферийных устройств. Он обеспечивает скорость передачи данных 1,42 кбит/с и может передавать данные на расстояние до 50 футов.
- Работа RS-232: RS-232 используется для подключения и передачи данных между оборудованием передачи данных (DTE) и оборудованием передачи данных (DCE). DTE в основном действуют как передатчики, а DCE — как приемники. Используются следующие контакты:
 DTE в основном действуют как передатчики, а DCE — как приемники. Используются следующие контакты:
DTE в основном действуют как передатчики, а DCE — как приемники. Используются следующие контакты:| ТХД | ПЕРЕДАТЧИК |
| РСД | ПРИЕМНИК |
| РТС | ЗАПРОС НА ОТПРАВКУ |
| КТС | УДОБНО ОТПРАВИТЬ |
| Земля | ЗАЗЕМЛЕНИЕ |
От DTE RTS формирует запросы на отправку данных в DCE. Из DCE CTS очищает путь для получения данных, и данные отправляются. Точно так же RTS генерирует запросы и разрешается CTS для передачи данных от DCE к DTE.
- Электрические характеристики RS-232: Ниже приведены электрические характеристики RS-232:
- Уровни напряжения: Уровень напряжения в RS-232 находится в диапазоне от -25В до +25В. Уровни напряжения подразделяются на сигнальное напряжение и управляющее напряжение.
Напряжение сигнала от -3 В до -25 В соответствует логическому «0», а напряжение сигнала от +3 В до +25 В соответствует логической «1». Напротив, управляющее напряжение от -3 В до -25 В представляет собой логическую «1», а сигнальное напряжение от +3 В до +25 В представляет собой логический «0». Напряжение от -3В до +3В считается неопределенным.
Напротив, управляющее напряжение от -3 В до -25 В представляет собой логическую «1», а сигнальное напряжение от +3 В до +25 В представляет собой логический «0». Напряжение от -3В до +3В считается неопределенным.
- Скорость нарастания: Скорость нарастания — это скорость изменения уровней сигнала. RS-232 поддерживает скорость нарастания до 30 В/мкс 90 162
- Рабочее напряжение: Рабочее напряжение: макс. 250 В переменного тока
- Номинальный ток: Номинальный ток: макс. 3 А
- Скорость передачи: RS-232 поддерживает скорость передачи от 110 до 230400. Обычно используются 1200, 4800, 9600 и 115200
- Применение RS-232:
- ПК предыдущего поколения для подключения принтеров, модемов, мышей и т. д.
- Станки с ПЛК, станки с ЧПУ и сервоконтроллеры
- Платы микроконтроллеров, принтеры чеков, системы точек продаж (PoS) и т. д.
 д.
д.RS-485
RS-485 также известен как TIA-485/EIA-485. Он широко использовался для подключения одного DTE к одному DCE и обеспечивал максимальную скорость 20 кбит/с. По мере того как времена менялись, а спрос на скорость и стоимость рос, индустрия начала искать интерфейс, который мог бы удовлетворить следующие потребности:
- Более высокая скорость связи
- Междугородняя связь
- Подключение напрямую к DTE
- Подключение нескольких DTE
С учетом вышеизложенного был разработан и представлен интерфейс RS-485. RS-485 является наиболее универсальным и широко используемым отраслевым стандартом связи, поскольку он удовлетворяет всем вышеперечисленным требованиям.
Используя RS-485, можно передавать данные со скоростью 10 Мбит/с на расстояние до 15 метров. Можно отправлять данные на расстояние до 4000 футов, но скорость постепенно снижается.
Передача данных в RS-485
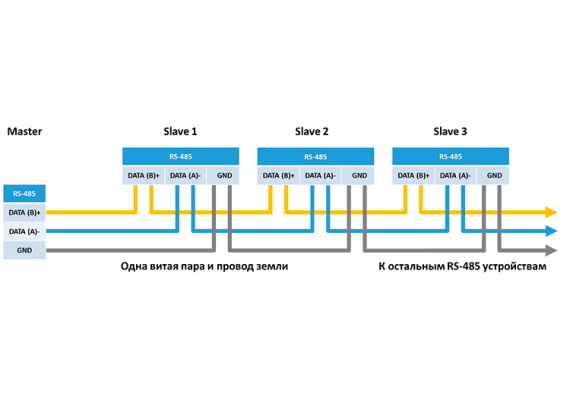
В RS-485 для передачи данных используется витая пара. Это означает, что есть два провода (кроме земли) для отправки и получения данных.
Это означает, что есть два провода (кроме земли) для отправки и получения данных.
RS-485 следует схеме передачи данных ведущий-ведомый. Ведущее устройство отвечает за передачу данных между двумя или более ведомыми устройствами. Это ведущее устройство расположено в центре, с двумя ведомыми на каждом конце, и весь поток данных и передача координируются ведущим устройством.
Основные различия между RS-232 и RS-485
Между RS-232 и RS-485 нет большой разницы. Несмотря на то, что они похожи по внешнему виду и дизайну, между ними мало различий в технических характеристиках и функциях. Вот они:
- RS-232 имеет одного отправителя и несколько получателей, тогда как установка RS-485 может иметь несколько отправителей и несколько получателей. Используя RS-485, несколько слушателей и передатчиков могут общаться друг с другом, что невозможно при настройке RS-232. Таким образом, RS-485 поддерживает полнодуплексную и полудуплексную связь, тогда как RS-232 поддерживает только дуплексную связь 9. 0162
- Проектирование и подключение RS-485 проще, поскольку в нем используется два провода, тогда как типичная конструкция RS-232 включает четыре провода
- Программирование RS-485 сложнее по сравнению с RS-232. Это связано с тем, что RS-485 дает только два провода для отправки и получения данных, в то время как в RS-232 у нас есть четыре провода для передачи данных
- RS-232 может передавать данные на расстояние до 15 метров, а RS-485 может передавать данные на расстояние до 1200 метров
- RS-232 поддерживает топологию «точка-точка», а RS-485 поддерживает многоточечную топологию
 0162
0162Применение RS-485
- Широко используется в компьютерных системах и системах автоматизации
- Автобус с салоном коммерческого самолета
- ПЛК, заводские цеха и внедрение АСУ ТП
- Театры и спектакли, для управления освещением
Вопросы безопасности
До разработки Ethernet безопасность систем RS-232 и RS-485 не вызывала большого беспокойства.
Похожие записи
-

 Калимба слушать: Музыка в исполнении инструмента калимба — Лицензирование музыки без оплаты роялти
Калимба слушать: Музыка в исполнении инструмента калимба — Лицензирование музыки без оплаты роялти - Шланг пылесос самсунг: Трубки, фитинги, шланги для пылесосов – купить запчасти для пылесосов SAMSUNG с доставкой по Москве, СПб, Смоленску, России
- Пневматический пистолет umarex glock 17 gen5: Пневматический пистолет Umarex Glock 17 (5.8361) купить в Москве, СПБ, цена в интернет-магазине «Pnevmat24»
- Ac 5v: AC/DC блоки питания 5V — DemiLed.ru