Gy 85: Инерционный трекер на базе Arduino и GY-85 / Хабр
GY-85 или как я инерционный трекер для City Car Driving собирал
Валялся у меня руль Logitech G27 Racing Wheel, купленный давно с рук занедорого.
Хорошая штука в гонки поездить, но в City Car Driving (бывший 3D Инструктор) очень неудобно по сторонам смотреть.
Сначала я пытался при помощи камеры отслеживать движения головы, но это дело очень ненадежное. Постоянно координаты терялись.
И почитав это, это и это я принялся за сборку своего трекера.
Купил GY-85, купил самую дешевую Ардуино Nano на Ch440. Почему именно Nano? Да потому что она компактная по размеру и имеет на борту выход на 3.3В и 5В(да еще и micro-usb порт в придачу), в отличие от pro mini у которого только есть 5В выход.
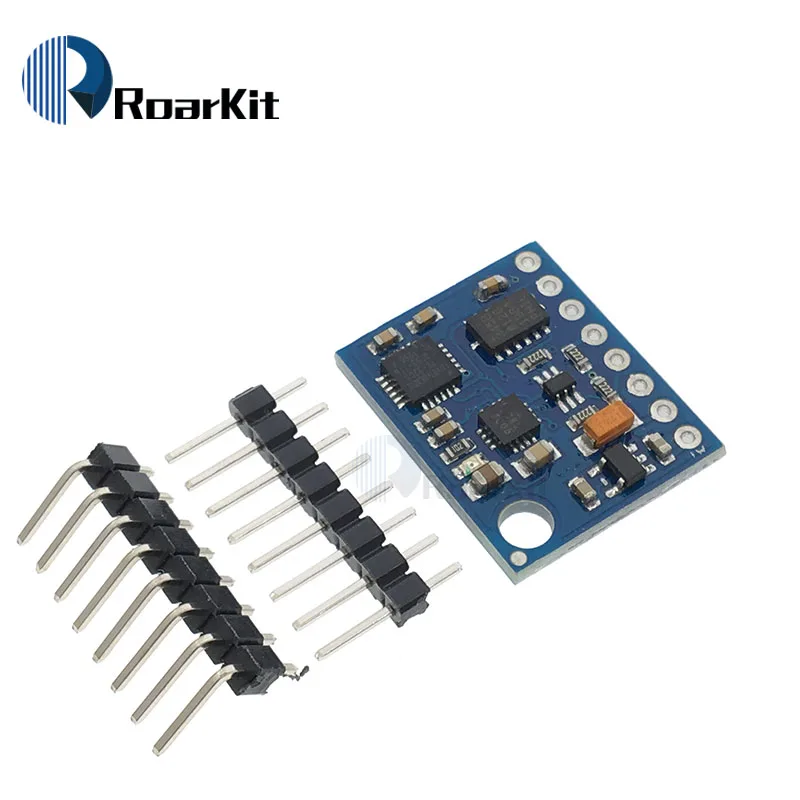
Спаиваются Arduino Nano и GY-85 следующими контактами:
GY-85 -> Arduino Nano
VCC_IN -> 3v3
GND -> GND
SCL -> A5
SDA -> A4
Спаял, присоединил mini-usb кабель к Nano.
Далее нужно скачать среду разработки для Arduino версии 1.0.6 — arduino.cc/download.php?f=/arduino-1.0.6-windows.exe. Качать надо именно 1.0.6, потому что 1.6.5 не компилирует скетч и вываливается с ошибкой.
Ссылка на скетч (исходный код для GY-85) — sourceforge.net/projects/gy80facetrack/files/DIY_headtracker_FTR_GY85.zip/download
Устанавливаем Arduino IDE версии 1.0.6, распаковываем куда-нибудь исходник для датчика.
Вместе со средой разработки у Вас установятся драйвера и система будет видеть новый COM-порт. Но это только если Вы купили оригинальную ардуино.
Если же Вы, как и я, купили китайский клон с чипом Ch440, то ставьте драйвер — smart-chip.ru/wp-content/uploads/2014/10/DRIVER-Ch440G.rar
Но если у Вас Windows 7 x64, то Вас ждет сюрприз с неподписанным драйвером, поэтому качаем драйвер отсюда и устанавливаем — www.winchiphead.com/download/Ch441/Ch441SER.ZIP (мне сразу помогло).
Запускаем Arduino IDE 1.0.6, в ней выбираем Файл — Открыть. Открываем папку, в которую мы распаковали исходники и выбираем файл DIY_headtracker.ino
Открываем папку, в которую мы распаковали исходники и выбираем файл DIY_headtracker.ino
Потом нам нужно выбрать тип платы: Сервис — Плата — Arduino Nano w/ATmega 328, а затем и COM-порт, к которому подключена плата: Сервис — Последовательный порт — COM(обычно самый нижний).
Затем нажать круглую кнопку со стрелкой, дождаться, пока исходный код скомпилируется и загрузится в плату.
Всё. Можно закрывать Arduino IDE.
Подготовка FaceTrackNOIR.
Качаем FaceTrackNOIR — sourceforge.net/projects/facetracknoir/files/latest/download и устанавливаем. Затем качаем dll-ки для того, чтобы программа видела наш инерционник — sourceforge.net/projects/hatire/files/FTNoIR_Tracker_HAT_V210.zip/download и распаковываем в ту папку, куда установился FaceTrackNOIR.
Прикручиваем, подключенную к компьютеру, получившуюся конструкцию к наушникам проволокой(можно скотчем, можно веревочкой).
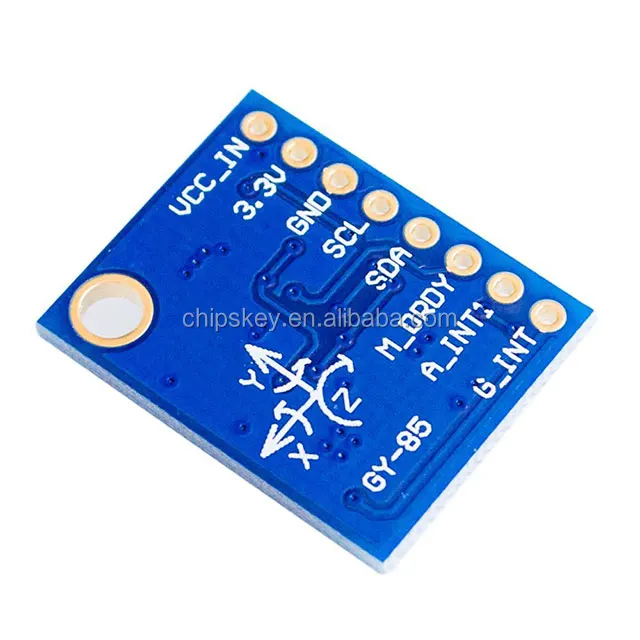
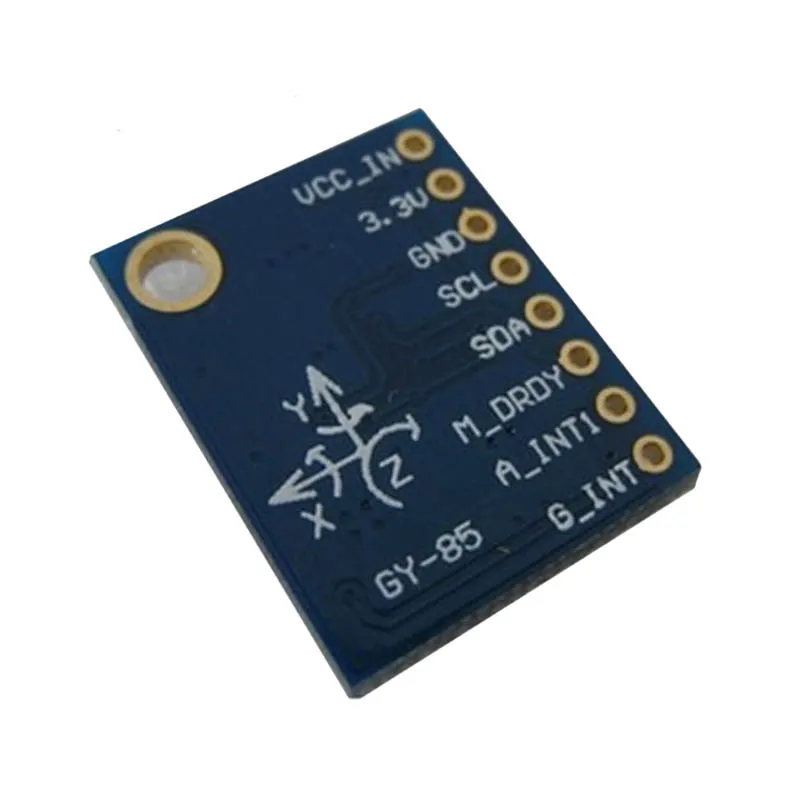
Ориентируем плату так, чтобы микросхемами она смотрела вверх, а стрелкой Y вперед.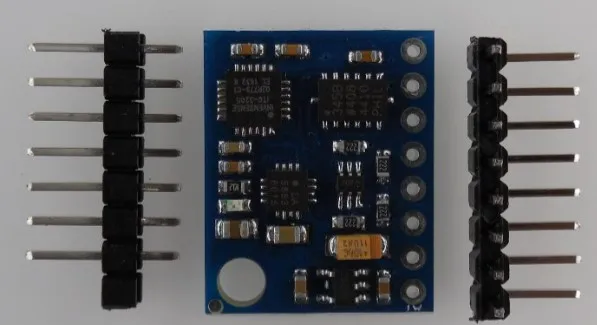
Получилось следующее:
Открываем программу, в разделе Tracker Source 1 выбираем «Hatire Arduino», в настройках (кнопка Settings) выбираем COM-порт, на котором находится Arduino, в закладке Command Serial parameters проверяем чтобы было 115200/8/none/1/CTS-RTS, устанавливаем Delay init 1000, delay start 1000 и нажимаем Start.
Головой не дергаем. Через пару секунд начнут приходить данные (зелёные и серые цифры начнут меняться), а лицо с желтым прицелом придёт в движение.
Запускаем City Car Driving, видим, что трекер вращает камерой.
Теперь можно настроить чувствительность и максимальное вращение камерой. В FaceTrackNOIR заходим в закладку Curves и настраиваем оси.
Я сделал примерно так:
но если Вы хотите оборачиваться назад, то придется оставить оси как есть.
Вобщем получилось вот такая конструкция:
Планирую купить
+29
Добавить в избранное
Обзор понравился
+38
+81
GY-85 — Быстрое изучение таблицы данных.
 ADXL345 Как это работает #arduSerie 34 | от J3 | Jungletronics
ADXL345 Как это работает #arduSerie 34 | от J3 | Jungletronics
В этом посте мы разблокируем акселерометр — ADXL345 — .
В этом другом посте мы уже работаем с компасом…
Вы спешите? Хочешь коды?
А плата GY-85 , что в ней особенного?
GY-85 Особенности: Модель : GY-85 — Несколько датчиков в микросхеме или на плате. 9DOF : Сенсорный модуль — Девять степеней свободы — 9 осевых модулей Сверхнизкое энергопотребление: от 23 мкА в режиме измерения Фиксированное 10-битное разрешение Полное разрешение, до 13-битного разрешения при ±16 g Обнаружение свободного падения Диапазон напряжения питания: Цифровые интерфейсы I2C от 2,0 до 3,6 В: эта плата подключает CS к 3,3 В, чтобы сообщить датчику, что мы будем использовать его как устройство I2C , а не как устройство SPI 3 чипа на плате: они (с соответствующими 7-битными адресами): ADXL345 — 0x53 — ускорение по трем осям
ITG3205 — 0x69 — гироскоп по трем осям
HMC5883L — 0x1E — магнитное поле по трем осям: для чипа ускорения альтернативный адрес IIC 0x53 можно выбрать, заземлив контакт SDO/ALT ADDRESS (контакт 12).Это именно то, что делает эта доска!
 Это именно то, что делает эта доска!
Это именно то, что делает эта доска! Адрес I2c: 0x53
Теперь вернемся к акселерометру… В техническом описании указано:
ADXL345 — ТЕОРИЯ РАБОТЫ
ADXL345 — это полноценная 3-осевая система измерения ускорения. ADXL345 имеет диапазон измерения не менее ±16 g.
Акселерометр может измерять статическое ускорение свободного падения в приложениях с датчиками наклона, а также динамическое ускорение, вызванное движением, ударами или вибрацией.
Датчик представляет собой структуру из поликремния с микромеханической обработкой поверхности, построенную поверх кремниевой пластины. Прогиб конструкции измеряется с помощью дифференциального конденсатора, состоящего из независимых неподвижных пластин и пластин, прикрепленных к движущейся массе.
ADXL345 — МЕХАНИЧЕСКИЙ ДАТЧИК
ADXL345 использует единую структуру для измерения осей X, Y и Z. В результате направления восприятия трех осей сильно ортогональны и имеют небольшую чувствительность к поперечной оси.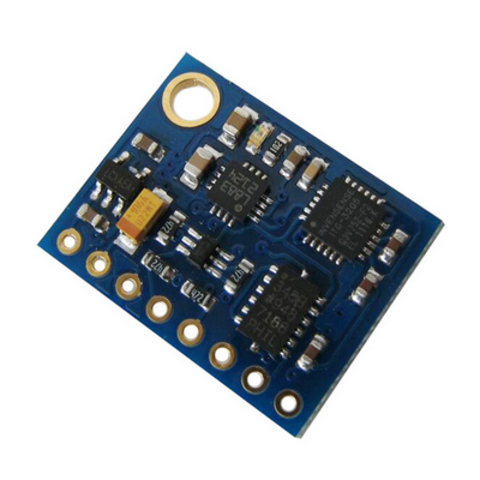
ADXL345 — ИНФОРМАЦИЯ ПО ПРИМЕНЕНИЮ — РАЗЪЕДИНЕНИЕ ИСТОЧНИКА ПИТАНИЯ
Для большинства приложений один конденсатор емкостью 0,1 мкФ, CDC, расположенный рядом с контактами питания ADXL345, обеспечивает достаточную развязку акселерометра от помех источника питания.
ADXL345 — ИСПОЛЬЗОВАНИЕ ПРИ РАБОЧЕМ НАПРЯЖЕНИИ, ОТЛИЧНОМ 3 В
ADXL345 испытан и рассчитан на VS = 3 В; однако он может питаться от напряжения VS от 1,8 В до 3,6 В. Обратите внимание, что некоторые рабочие параметры изменяются при изменении напряжения питания.
ADXL345 — ВЫХОД ЯВЛЯЕТСЯ РАЦИОМЕТРИЧЕСКИМ
Логометрическим ( Прилагательное )?
(электроника) Описание любой системы, в которой выход прямо пропорционален входу.
Выходной сигнал ADXL345 является логометрическим, поэтому выходная чувствительность (или масштабный коэффициент) изменяется пропорционально напряжению питания. При Vs = 2,5 В выходная чувствительность обычно составляет 256 LSB/g (см. код ниже).
код ниже).
Выход смещения при нулевой перегрузке также является логометрическим, поэтому выход при нулевой перегрузке номинально равен VS/2 при всех напряжениях питания.
ADXL345 — РЕГУЛИРОВКА МОЩНОСТИ И ОСИ УСКОРЕНИЯ
Таблица 16. Карта регистров — техническое описание ADXL345
Адрес
Hex Dec Название Тип Reset_Value Описание
0x2D 45 POWER_CTL R/W 00000000 Управление функциями энергосбережения.
(…)
0x32 50 DATAX0 R 00000000 X-Axis Data 0.
0x33 51 DATAX1 R 00000000 X-Axis Data 1.
0x34 52 DATAY0 R 00000000 Y-Axis Data 0.
0x35 53 DATAY1 R 00000000 Y-Axis Data 1.
0x36 54 DATAZ0 R 00000000 Данные оси Z 0.
0x37 55 DATAZ1 R 00000000 Данные оси Z 1.
Устройство перейдет в спящий режим при включении питания, так что это первый регистр, о котором мы должны беспокоиться: POWER_CTL!
ADXL345 — КАК ЭТО РАБОТАЕТ
Режим ожидания или измерение : При включении питания устройство находится в режиме ожидания, ожидая команды для входа в режим измерения, и все функции датчика отключены. После того, как устройство получит указание войти в режим измерения, все функции датчика будут доступны.
После того, как устройство получит указание войти в режим измерения, все функции датчика будут доступны.
Режим ожидания : Для работы с еще более низким энергопотреблением можно использовать режим ожидания. В режиме ожидания потребление тока снижается до 0,1 мкА (типично).
В этом режиме измерения не производятся. Режим ожидания включается очисткой бита измерения (бит 3) в регистре POWER_CTL (адрес 0x2D).
Перевод устройства в режим ожидания сохраняет содержимое FIFO.
FIFO : накапливает выборки, содержащие последние 32 выборки из измерений осей x, y и z.
Получение данных из FIFO : Данные FIFO считываются через регистры DATAX, DATAY и DATAZ (от адреса 0x32 до адреса 0x37). Когда FIFO в
FIFO, поток или режим триггера, чтение в регистры DATAX, DATAY и DATAZ чтение данных, хранящихся в FIFO. Каждый раз, когда данные считываются из FIFO, самые старые данные по осям x, y и z помещаются в регистры DATAX, DATAY и DATAZ.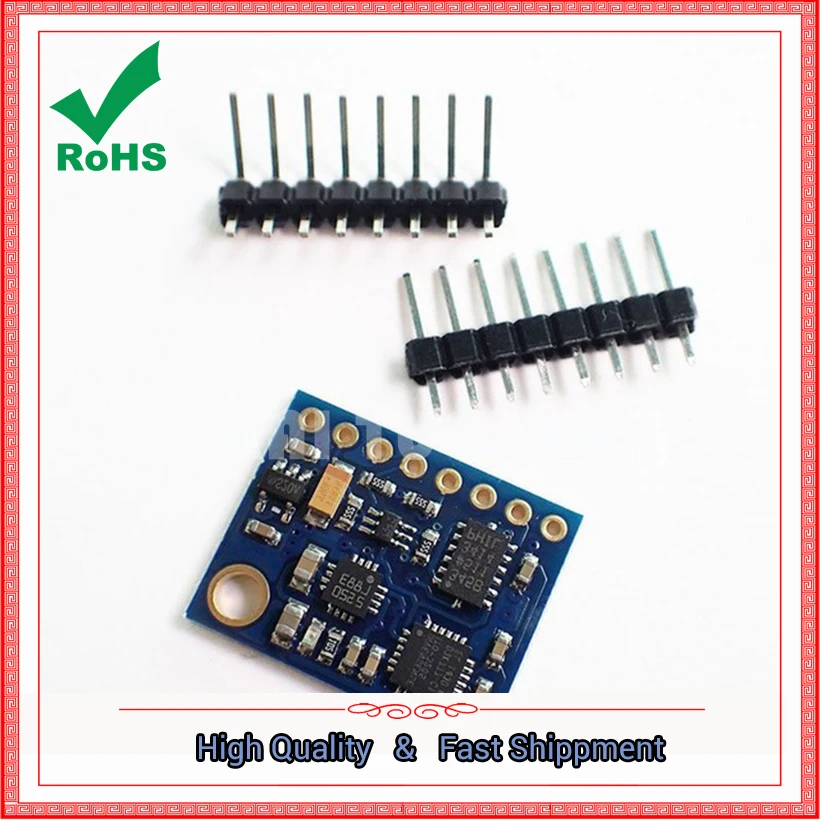
Бит измерения : Значение 0 в бите измерения переводит деталь в режим ожидания, а установка 1 переводит деталь в режим измерения. ADXL345 включается в режиме ожидания с минимальным энергопотреблением
.
ADXL345— [ПСЕВДО] КОДИРОВАНИЕ
Вот шесть шагов ПСЕВДОКОД для ADXL345:
Обратите внимание, что у нас есть 6 вопросов, на которые нужно ответить (на самом деле 5…):
1 — Какое устройство (адрес) вас интересует в ?
2 — С каким регистром вы хотите поговорить?
3 — Что вы хотите, чтобы регистр передал?
4 — Что вы хотите спросить о конкретном регистре?
5 — Теперь подождите, пока данные зациклятся через некоторое время…
6 — Теперь, как вам нужна конфигурация чисел по трем осям?
Рабочий код Вкус I; см. другие варианты в моем репозитории на github: проект 34 #arduSerie
Вот мой макет:
Теперь загрузите этот код в свою Arduino и получайте удовольствие!
ИНТЕРЕСНО ОБ УСКОРЕНИИ:
РОЛЛЕР ГОРКИ Отвратительные ощущения, которые вы испытываете на американских горках, возникают благодаря кратким перегрузкам до 5 g.
Ускорение обычно составляет 1,45 г (14,2 м/с2) до 200 км/ч (124 мили в час), что означает, что водитель толкается сиденьем с силой, ускорение которой в 1,45 раза превышает земное притяжение. Углеродные тормоза в сочетании с шинной технологией и аэродинамикой автомобиля обеспечивают поистине выдающееся тормозное усилие. Сила торможения при торможении обычно составляет 4 g (39 м/с2) и может достигать 5–6 g при торможении на экстремальных скоростях, например, на трассе Жиля Вильнёва или в Индианаполисе.
 Аттракционы должны быть спроектированы таким образом, чтобы люди не теряли сознание. Наша устойчивость к перегрузкам зависит не только от величины и продолжительности ускорения или замедления, но и от ориентации нашего тела. Мы наиболее уязвимы к силе, действующей на ноги, потому что это отталкивает кровь от мозга. От 5 до 10 секунд при нагрузке от 4 до 5 g по вертикали обычно приводит к туннельному зрению, а затем к потере сознания. ИСТРЕБИТЕЛИ Истребители могут тянуть до 9 g по вертикали, и чем больше пилот может выдержать без потери сознания, тем выше его шансы в воздушном бою. Некоторые пилоты носят «гидрокостюмы», которые помогают отводить кровь от ног к мозгу. Люди с самой высокой толерантностью к перегрузке известны как «перегрузочные монстры». «У нас были люди, которые были в полном сознании при 6 g», — говорит физиолог Алек Стивенсон из британской оборонной фирмы Qinetiq. Другие теряют сознание при 3 г, говорит он. Пилоты могут повысить свою естественную толерантность к гравитации, тренируясь в центрифугах, таких как центрифуги Qinetiq в Фарнборо в Хэмпшире.
Аттракционы должны быть спроектированы таким образом, чтобы люди не теряли сознание. Наша устойчивость к перегрузкам зависит не только от величины и продолжительности ускорения или замедления, но и от ориентации нашего тела. Мы наиболее уязвимы к силе, действующей на ноги, потому что это отталкивает кровь от мозга. От 5 до 10 секунд при нагрузке от 4 до 5 g по вертикали обычно приводит к туннельному зрению, а затем к потере сознания. ИСТРЕБИТЕЛИ Истребители могут тянуть до 9 g по вертикали, и чем больше пилот может выдержать без потери сознания, тем выше его шансы в воздушном бою. Некоторые пилоты носят «гидрокостюмы», которые помогают отводить кровь от ног к мозгу. Люди с самой высокой толерантностью к перегрузке известны как «перегрузочные монстры». «У нас были люди, которые были в полном сознании при 6 g», — говорит физиолог Алек Стивенсон из британской оборонной фирмы Qinetiq. Другие теряют сознание при 3 г, говорит он. Пилоты могут повысить свою естественную толерантность к гравитации, тренируясь в центрифугах, таких как центрифуги Qinetiq в Фарнборо в Хэмпшире.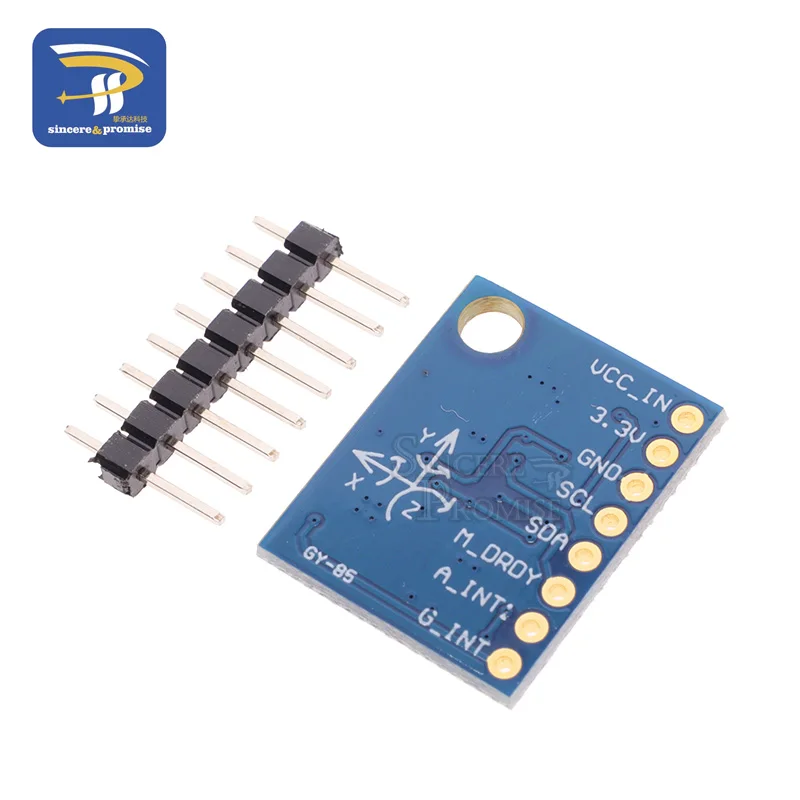 Они учатся напрягать ноги и мышцы живота, чтобы подтолкнуть кровь к верхней части тела, и дышать особым образом, сильно напрягаясь, как будто испражняясь при запорах, чтобы поднять кровяное давление. Самая большая вертикальная сила, которую кто-либо выдерживал, составляет 31,25 г, хотя для этого субъект, доктор НАСА Р. Фланаган Грей, находился в специальном резервуаре с водой, который создавал давление на его тело, чтобы помочь ему выдерживать перегрузки. воздух США. ПИЛОТЫ Ф1 Каково быть пилотом Ф1?
Они учатся напрягать ноги и мышцы живота, чтобы подтолкнуть кровь к верхней части тела, и дышать особым образом, сильно напрягаясь, как будто испражняясь при запорах, чтобы поднять кровяное давление. Самая большая вертикальная сила, которую кто-либо выдерживал, составляет 31,25 г, хотя для этого субъект, доктор НАСА Р. Фланаган Грей, находился в специальном резервуаре с водой, который создавал давление на его тело, чтобы помочь ему выдерживать перегрузки. воздух США. ПИЛОТЫ Ф1 Каково быть пилотом Ф1?  В 2007 году Мартин Брандл, бывший гонщик Гран-при, протестировал Williams Toyota FW29.Автомобиль Формулы-1, и заявил, что при резком торможении он чувствовал, как его легкие ударяются о внутреннюю часть его грудной клетки, заставляя его непроизвольно выдохнуть. автомобили поддерживают скорость от 265 до 285 км / ч (от 165 до 177 миль в час) (в 2006 г.) и испытывают перегрузку от 4,5 до 5,5 g в течение 7 секунд - самый продолжительный устойчивый крутой поворот в Формуле 1.
В 2007 году Мартин Брандл, бывший гонщик Гран-при, протестировал Williams Toyota FW29.Автомобиль Формулы-1, и заявил, что при резком торможении он чувствовал, как его легкие ударяются о внутреннюю часть его грудной клетки, заставляя его непроизвольно выдохнуть. автомобили поддерживают скорость от 265 до 285 км / ч (от 165 до 177 миль в час) (в 2006 г.) и испытывают перегрузку от 4,5 до 5,5 g в течение 7 секунд - самый продолжительный устойчивый крутой поворот в Формуле 1. Гипотетическая трехступенчатая ракета для достижения орбиты
РАКЕТНЫЕ УСТАНОВКИ
Какие перегрузки вызывают разные пусковые установки?
На приведенном выше рисунке показано, что современные устройства запуска спутников ограничивают пиковое ускорение примерно до 4g. STS (Шаттл) сделал то же самое. Во времена Аполлона они использовали цифры 6g и 8g для пиковых ускорений запуска или, возможно, пиковых сил входа в атмосферу.
Загрузить весь файл для этого проекта
Авторы и ссылки :
Прорыв — 3-осевой аналоговый акселерометр ADXL345
Максимум: Сколько gs вы можете тянуть?
Ускорения запуска: значения, история
xsens: акселерометры
madc/GY-85
Sparkfun ADXL345 Руководство по подключению
Нажмите, нажмите, отпустите. Акселерометр ADXL345 + Arduino с http://bildr.org
Акселерометр ADXL345 + Arduino с http://bildr.org
— — — — — — — — — — опубликовано в июне 2017 г. — — — — — — — — — —
9-осевой датчик GY-85 ITG3205 ADXL345 HMC5883L гироскоп 85, 18,41 €
Настройки конфиденциальности данных
Указанные здесь настройки сохраняются в «локальной памяти» вашего устройства. Настройки будут запомнены при следующем посещении нашего интернет-магазина. Вы можете изменить эти настройки в любое время (значок отпечатка пальца в левом нижнем углу).
Для получения дополнительной информации о сроке действия файлов cookie и необходимых основных файлах cookie см. Уведомление о конфиденциальности.
Выбрать/Отменить все
YouTube
Дополнительная информация
Чтобы просмотреть содержимое YouTube на этом веб-сайте,
вам необходимо дать согласие на передачу данных и хранение сторонних файлов cookie
Ютуб (гугл).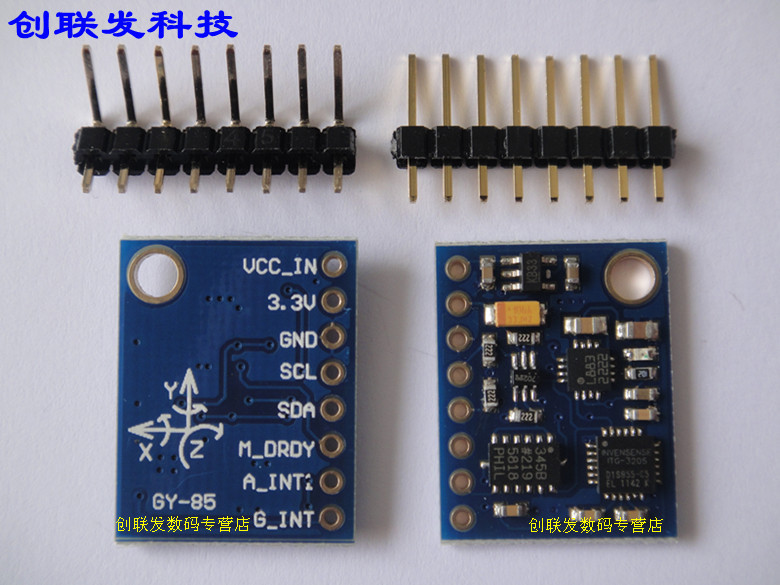
Это позволяет нам улучшить ваш пользовательский опыт и сделать нашу
сайт лучше и интереснее.
Без вашего согласия никакие данные не будут переданы на YouTube.
Однако вы также не сможете пользоваться услугами YouTube на этом веб-сайте.
Описание:
Встраивание видео
Процессинговая компания:
Google Inc.
Условия эксплуатации:
Ссылка
Vimeo
Дополнительная информация
Для просмотра контента Vimeo на этом веб-сайте вам необходимо согласиться с
передача данных и хранение сторонних файлов cookie Vimeo.
Это позволяет нам улучшить
опыт и сделать наш сайт лучше и интереснее.
Без вашего согласия никакие данные не будут
быть перенесены на Vimeo. Однако вы также не сможете пользоваться услугами Vimdeo на этом веб-сайте.
Описание:
Встраивание видео
Процессинговая компания:
Vimeo
Условия эксплуатации:
Ссылка
ReCaptcha
Дополнительная информация
Для отправки форм на этой странице вам необходимо дать согласие на передачу данных и хранение сторонних файлов cookie компанией Google.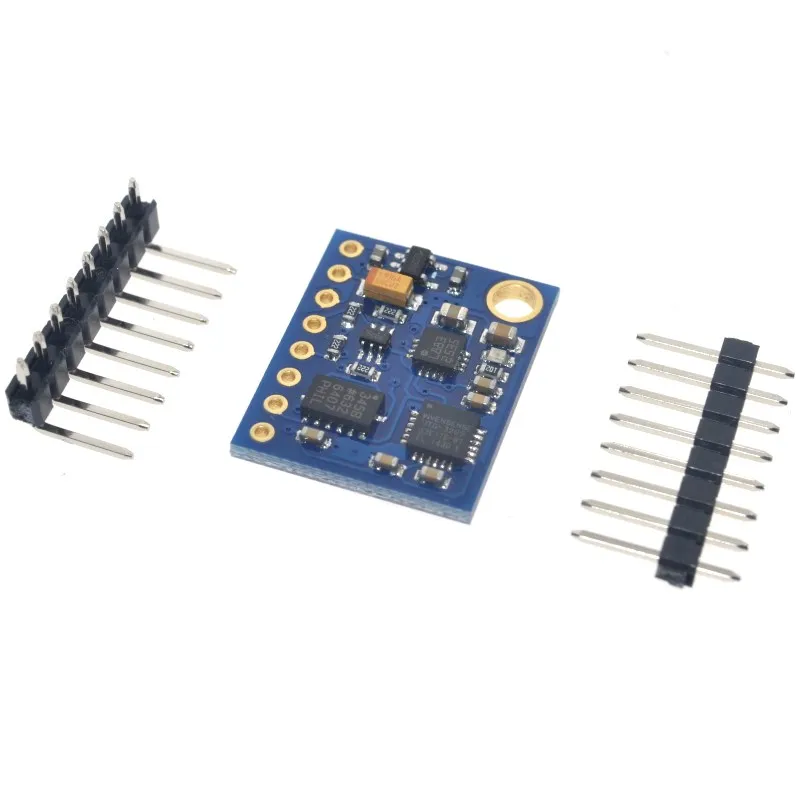
С вашего согласия будет встроена reCAPTCHA, служба Google, позволяющая избежать спам-сообщений через контактные формы.
Эта услуга позволяет нам предоставить нашим клиентам безопасный способ связаться с нами через онлайн-формы. В то же время сервис предотвращает компрометацию наших сервисов спам-ботами.
После того, как вы дали свое разрешение, вас могут попросить ответить на запрос безопасности для отправки формы.
Если вы не согласны, к сожалению, вы не можете использовать форму. Пожалуйста, свяжитесь с нами другим способом.
Описание:
Остановка спам-ботов
Процессинговая компания:
Google Inc.
Условия эксплуатации:
Ссылка
PayPal Express Checkout и Ratenzahlung
Дополнительная информация
Чтобы разблокировать предложения для расширенных вариантов оплаты, в частности экспресс-оплата и оплата в рассрочку, нам требуется ваше согласие на передачу данных и хранение сторонних файлов cookie платежной системы PayPal.![]() Это позволяет нам также предложить вам экспресс-оформление заказа и оплату в рассрочку. Без вашего согласия будет происходить только технически необходимая передача данных в PayPal, но тогда вы не сможете воспользоваться экспресс-оплатой или расширенными предложениями по оплате в рассрочку на этом сайте.
Это позволяет нам также предложить вам экспресс-оформление заказа и оплату в рассрочку. Без вашего согласия будет происходить только технически необходимая передача данных в PayPal, но тогда вы не сможете воспользоваться экспресс-оплатой или расширенными предложениями по оплате в рассрочку на этом сайте.
Описание:
Использование экспресс-кассы и Отображение предложений оплаты в рассрочку для отдельных товаров или всей покупки.
Процессинговая компания:
PayPal
Условия эксплуатации:
Ссылка
Выбрать/Отменить все
Настройки конфиденциальности данных
Хотите увидеть это содержимое? Активируйте желаемое содержимое только для одного сеанса или разрешите веб-сайту запомнить эти настройки. После того, как вы дали свое согласие, сторонние данные могут быть загружены. Для этого на вашем устройстве могут храниться сторонние файлы cookie.
Похожие записи
-
![Наушники на магните: Наушники на магните беспроводные в Нижнем Тагиле: 123-товара: бесплатная доставка, скидка-77% [перейти]](https://info-goods.ru/wp-content/themes/info-goods.ru/images/smallthumb.png)
![Наушники на магните: Наушники на магните беспроводные в Нижнем Тагиле: 123-товара: бесплатная доставка, скидка-77% [перейти]](data:image/svg+xml,%3Csvg%20xmlns=%22http://www.w3.org/2000/svg%22%20viewBox=%220%200%20210%20140%22%3E%3C/svg%3E) Наушники на магните: Наушники на магните беспроводные в Нижнем Тагиле: 123-товара: бесплатная доставка, скидка-77% [перейти]
Наушники на магните: Наушники на магните беспроводные в Нижнем Тагиле: 123-товара: бесплатная доставка, скидка-77% [перейти] - Маркер самопал: Пустые маркеры для краски — купить на Graffitimarket.ru
- Сила сцепления магнита это: Неодимовый магнит – суперсильный и суперполезный
- Synology dlna server: Пакеты | Synology Inc.