Cnc shield pinout: Песочница: CNC Shield v3.0 — Железо
Содержание
Плата расширения CNC Shield V4 для Arduino Nano
Плата расширения CNC Shield V4 используется для создания на основе контроллера Arduino Nano станков с числовым программным управлением, в том числе гравировальных, фрезерных, маркировальных, станков портальной резки, промышленных роботов, 3D принтеров.
Контроллер Arduino позволяет работать станку автономно или управлять с помощью компьютера через USB-порт.
Плата расширения CNC Shield v4.0 может работать с Arduino Nano и драйверами двигателей с помощью программного обеспечения Arduino GRBL. Прошивка (GRBL) внутри контролера обменивается информацией с ПК при помощи G-кодов.
Характеристики платы CNC Shield V4
Совместимые контроллеры: Arduino Nano
Количество осей: 3 (X, Y, Z)
Напряжение питания логической части: 3.3 — 5 В
Напряжение питания силовой части: 7.5-12 В
Совместимые драйверы: A4988 и DRV8825
Интерфейсы: UART, I2C
Программное обеспечение: Arduino GRBL
Размеры: 72 x 59 x 20 мм
Вес: 31 г.
Плата расширения CNC Shield v4.0 имеет три слота, по 16 контактов каждый, для подключения трех драйверов шаговых двигателей. Слоты, обозначены желтым цветом, и отвечают за оси X, Y, Z.
1 — Колодка для подключения биполярного шаговика (на 4 провода).
2 — Колодки управления микрошагом для драйверов шаговых двигателей.
Эти пины на плате никак не обозначены, условно назовем их M0, M1, M2, причем пара M0 верхняя.
В зависимости от выставленных перемычек, вы можете добиться вплоть до 1/32 шага на драйверах DRV8825 и 1/16 шага на драйверах A4988.
Перемычки устанавливаются в контакты М0, М1, М2, для определения режима работы драйвера A4988 согласно таблице.
3 — Колодки для подключения платы Arduino Nano. Для проверки подключения с обратной стороны CNC Shield V4 есть распиновка Arduino Nano – контакты должны совпадать.
4 — Разъемы для подключения концевых выключателей, их порядок следующий: X+ X- Y+ Y- Z+ Z-. Подключая концевики, необходимо соблюдая полярность.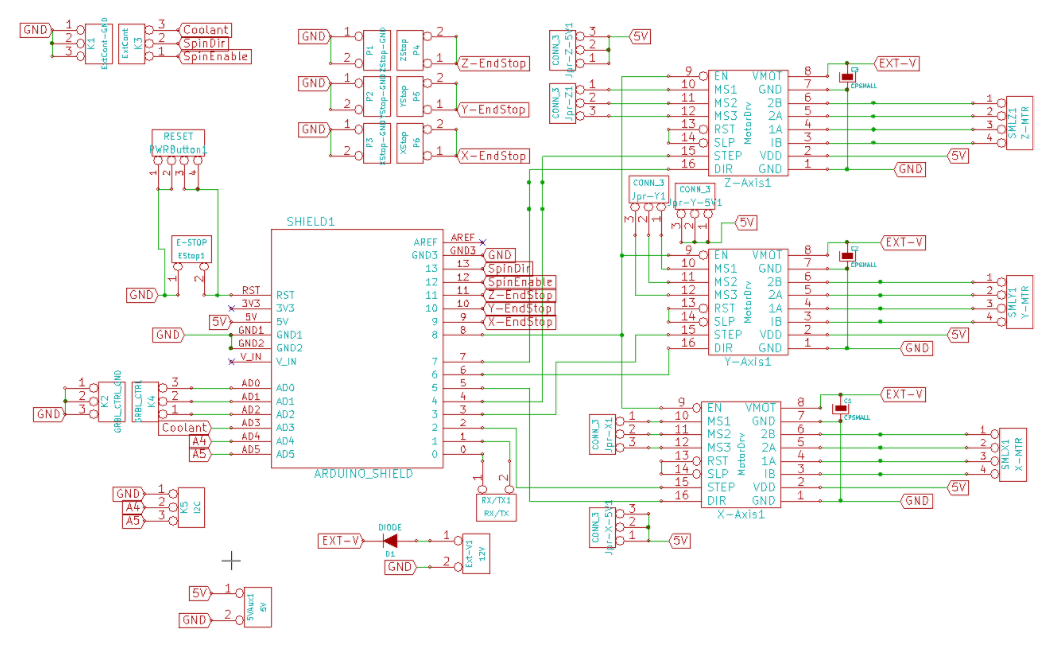
Колодка D12 замыкается для возможности управления шагом.
Колодка D13 замыкается для возможности управления направлением вращения.
5 — Кнопки и выключатели:
Кнопка возвращения на исходную позицию (Abort)
Кнопка паузы (Hold)
Кнопка продолжения (Resume)
Включения подачи охлаждения (CoolEn)
6 — Гнездо стандартного соединителя для подключения питания 7.5-12 В
7 — Кнопка перезагрузки. Под ней находится кнопка аварийной остановки (E-STOP)
8 — Контакты интерфейсов UART и I2C.
Контакты UART: Tx, Rx, «GND», «+5V»
Контакты I2C: SCL (Serial CLock), SDA (Serial DAta), «GND», «+5V».
Для подачи питания силовой части на двигатели нужно замкнуть джампером перемычку, обозначенную на плате Mot-VOT-Sel. Питание логической части происходит от контроллера Arduino Nano и составляет 5В. Напряжение логической части можно переключить на 3,3В. Для этого нужно замкнуть джампером перемычку, обозначенную на плате 3V3-GND.
Расширение Arduino CNC Shield V3.
 0 (A4988)
0 (A4988)
CNC Shield v3.0
Модель | CNC Shield v 3.0 (ЧПУ плата, версия 3.0) |
Размер | Arduino UNO и другие совместимые платы |
Количество осей | 4 (X, Y, Z, A) , из них оси X, Y и Z независимые, четвёртая ось A может дублировать любую из первых трёх либо работать независимо с управлением от 12 и 13 выходов Arduino |
Напряжение питания логической части | 5 В |
Напряжение питания силовой части | 12 – 36 В |
Драйверы | A4988, DRV8825 и другие совместимые |
Интерфейсы | UART, I2C |
Прошивка | GRBL — https://github. |
Размеры | 65 х 55 х 20 мм |
Вес | 32 г |
 com/grbl/grbl
com/grbl/grbl
Схема:
Плата CNC Shield v3.0 предназначена для создания оборудования, такого как 3D фрезерные станки, гравёры и, с некоторыми дополнениями, 3D-принтеры.
Для работы плата соединяется с Arduino Uno (или её аналогом того же размера). Драйверы А4988 устанавливаются в соответствующие слоты на плате таким образом, чтобы выходы питания двигателей на драйвере располагались возле разъёмов подключения двигателей на плате.
Плату Arduino надо прошить прошивкой GRBL. В настоящее время доступны версии 0.9j и 1.1. Настройки прошивки и управление работой двигателей производятся через интерфейс последовательного порта в Arduino IDE или с помощью отдельных программ, таких как Universal G-Code Sender. Управление производится через G-code — https://github.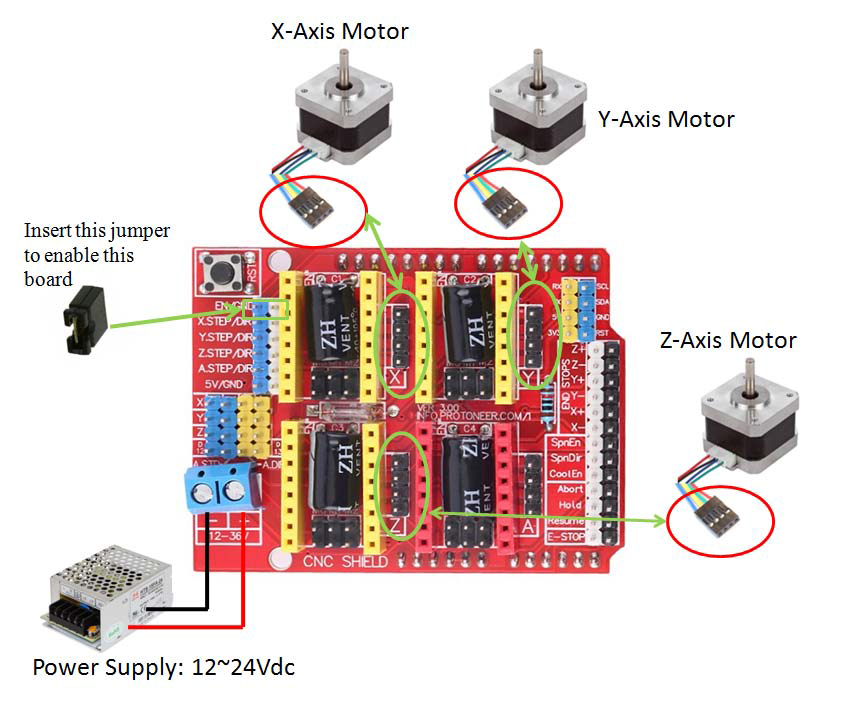 com/gnea/grbl/wiki/Grbl-v1.1-Commands
com/gnea/grbl/wiki/Grbl-v1.1-Commands
Видео:
Видео на канале «Ардуино проекты»:
Ссылки:
Самодельный фрезерный ЧПУ станок https://portal-pk.ru/news/132-nastroika-proshivki-grbl-chpu-stanka-kalibrovka-chpu.html
Прошивка GRBL (eng) https://github.com/gnea/grbl
Габариты (Д х Ш х В):
69мм х 54мм х 19мм
Вес:
32г.
Arduino-совместимый щит с ЧПУ Инструкции
Первый запуск
Важные моменты, которые следует учитывать перед началом работы:
1) Дважды проверьте полярность входного питания («+» и «-»)
2) Обратите внимание на ориентацию драйверов шаговых двигателей.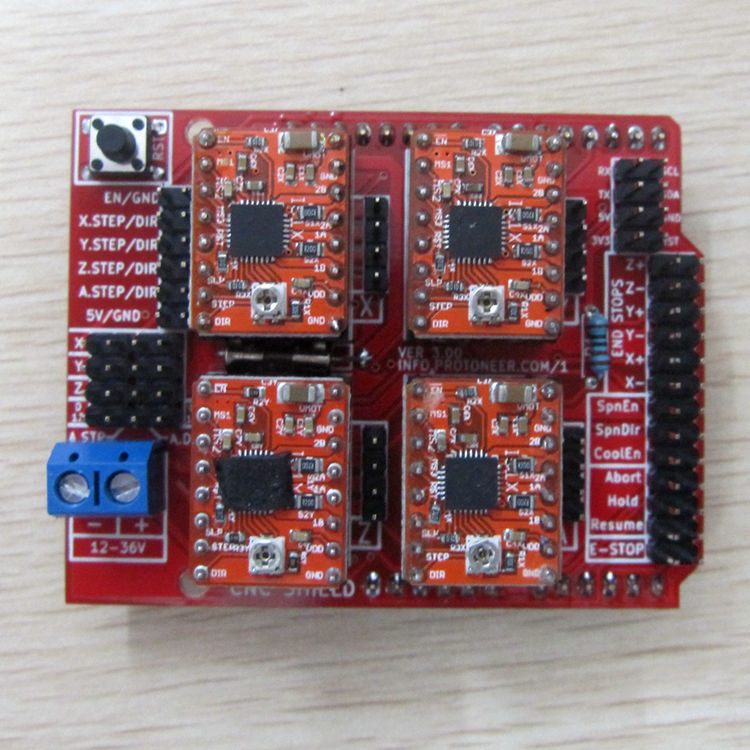 Обратите внимание, что потенциометр (потенциометр) на A4988 и DRV8825 находится на противоположной стороне
Обратите внимание, что потенциометр (потенциометр) на A4988 и DRV8825 находится на противоположной стороне
Предполетный контрольный список
1. Визуально проверьте все точки пайки на новой плате
2. Подключите экран к плате Arduino и загрузите прошивку GRBL, выполнив следующие шаги:
- Загрузите исходный код GRBL. Скачать здесь
- Разархивируйте загрузку, и у вас будет папка с именем «grbl-master»
- Запустите Arduino IDE. (Пожалуйста, убедитесь, что вы используете самую последнюю версию Arduino IDE.)
- Загрузите GRBL в Arduino IDE как библиотеку. (Нажмите раскрывающееся меню «Эскиз», затем перейдите к «Включить библиотеку» и выберите «Добавить библиотеку .ZIP»)
- ВАЖНО: выберите папку «Grbl» внутри папки «grbl-master», которая содержит только исходные файлы и пример каталога. (Если вы случайно выбрали файл .zip или неправильную папку, вам нужно будет перейти в библиотеку Arduino, удалить ошибку и повторить этот шаг.
 )
) - Откройте пример Arduino «GrblUpload». (Нажмите раскрывающееся меню «Файл», перейдите к «Примеры-> Grbl» и выберите «GrblUpload»)
- Скомпилируйте и загрузите GRBL на Arduino. (1. Подключите Arduino Uno к компьютеру. 2. Убедитесь, что ваша плата настроена на Arduino Uno в меню «Tool->Board», а последовательный порт правильно выбран в «Tool->Serial Port». 3 . Нажмите «Загрузить», и GRBL должен скомпилироваться и прошить на ваш Arduino!0020
 )
)
3. Откройте последовательное соединение с платой Arduino и проверьте, запущен ли GRBL. (Мы используем универсальный отправитель G-кода для подключения к GRBL)
4. Драйверы шаговых двигателей A4988 нуждаются в настройке для опорного напряжения. Мы рассмотрим это подробно позже.
5. Тестирование каждого разъема контроллера шагового двигателя по отдельности имеет решающее значение.
- Убедитесь, что внешний источник высокого напряжения не включен и не подключен
- Подключите шаговый двигатель к разъему контроллера шагового двигателя, который вы хотите проверить. Это очень важно, потому что драйверы Pololu Stepper предназначены для увеличения тока до тех пор, пока он не достигнет необходимого для работы тока. Без подключенного шагового двигателя нечему будет потреблять ток, и вы можете повредить драйвер шагового двигателя, если он перегреется в процессе.
- Затем установите драйвер шагового двигателя, убедившись, что контакт включения на драйвере совмещен с контактом включения на экране.
- Подключите внешний источник питания к экрану, убедившись, что вы подключили питание правильно. Неправильное подключение может привести к повреждению экрана, драйверов шагового двигателя и платы Arduino.
- Отправьте g-код на тестируемую ось. Шаговый двигатель должен двигаться, если все работает. (Пример GCode: «G1 X5?» или «G1 X0?» или «G1 Y5?»)
- Повторите вышеуказанный процесс с каждой осью, используя один и тот же шаговый драйвер. (Тестирование с одним драйвером снижает риск одновременного повреждения нескольких шаговых драйверов. )
 Это очень важно, потому что драйверы Pololu Stepper предназначены для увеличения тока до тех пор, пока он не достигнет необходимого для работы тока. Без подключенного шагового двигателя нечему будет потреблять ток, и вы можете повредить драйвер шагового двигателя, если он перегреется в процессе.
Это очень важно, потому что драйверы Pololu Stepper предназначены для увеличения тока до тех пор, пока он не достигнет необходимого для работы тока. Без подключенного шагового двигателя нечему будет потреблять ток, и вы можете повредить драйвер шагового двигателя, если он перегреется в процессе.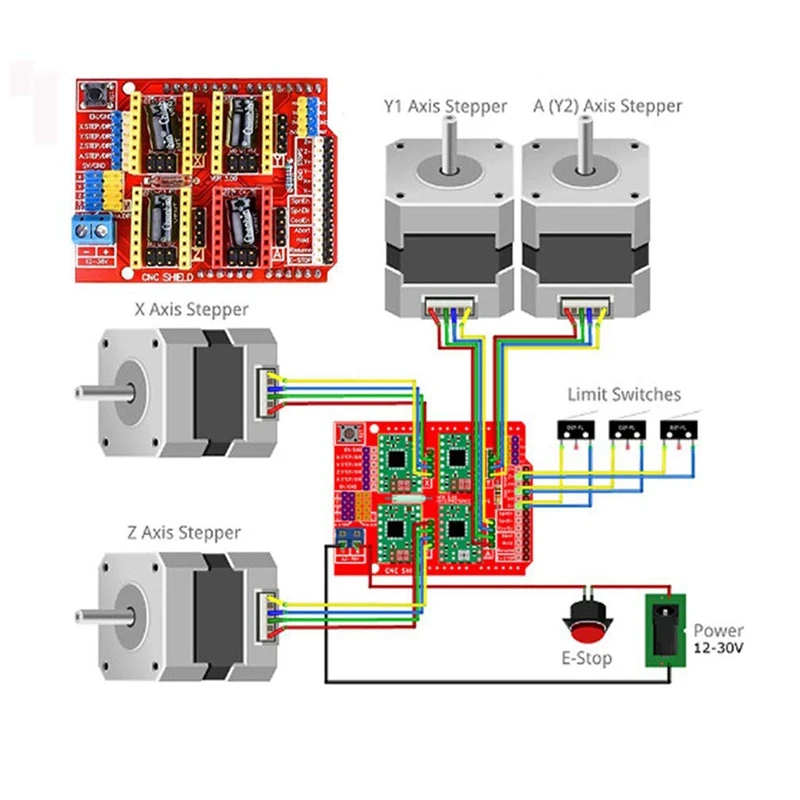 )
)6. После проверки всего вышеперечисленного подключите все драйверы и включите систему.
Регулировка предела тока (опорного напряжения) для драйвера шагового двигателя
A4988, продаваемый Zyltech, Rs = 0,1 Ом. Таким образом, максимальный ток равен Vref/0,4
Vref (опорное напряжение) измеряется с помощью мультиметра в точках, указанных
Drv 8825 продается Zyltech. Максимальный ток = Vref x 2
Опорное напряжение регулируется маленькой отверткой в точке, указанной белой стрелкой на рисунке справа. Мы предлагаем регулировать опорное напряжение небольшими шагами — не более четверти оборота за раз. Для начала вы можете установить максимальный ток 1А. Если двигатель перегревается, уменьшите Vref. Если двигатель не двигается или пропускает шаги, увеличьте Vref.
Настройки перемычек
Перемычки используются для настройки конфигурации 4-й оси, микрошага и конечной остановки.
Конфигурация 4-й оси
С помощью двух перемычек можно настроить 4-ю ось для клонирования оси X, Y или Z.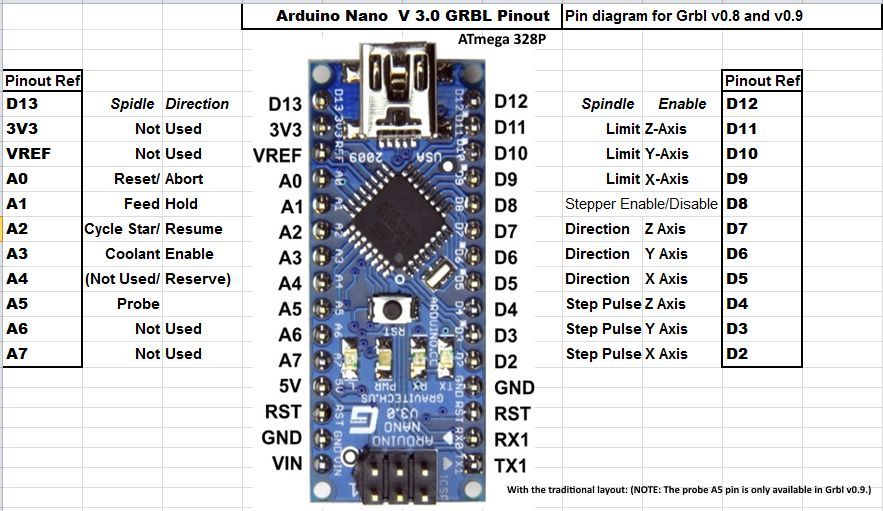 Он также может работать как отдельная ось, используя цифровой контакт 12 для шагового сигнала и цифровой контакт 13 в качестве сигнала направления. (на данный момент GRBL поддерживает только 3 оси)
Он также может работать как отдельная ось, используя цифровой контакт 12 для шагового сигнала и цифровой контакт 13 в качестве сигнала направления. (на данный момент GRBL поддерживает только 3 оси)
Клонировать ось X на 4-й шаговый драйвер | Клонировать ось Y для 4-го шагового привода | Клонировать ось Z для 4-го шагового привода | Используйте D12 и D13 для управления драйвером 4-го шагового двигателя |
Настройка микрошага для каждой оси
*В приведенных ниже таблицах высокий уровень означает, что перемычка установлена, а низкий уровень означает, что перемычка не установлена.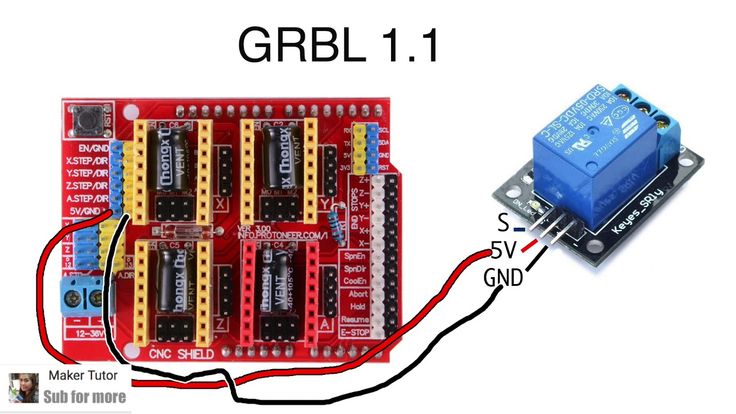
Конфигурация драйвера шагового двигателя Pololu A4988:
MS0 MS1 MS2 Разрешение микрошага
Низкий Низкий Низкий high Low Четверть шага
High High Low Восьмой шаг
High High High Шестнадцатый шаг
Pololu Конфигурация драйвера шагового двигателя DRV8825:
MODE0 MODE1 MODE2 Microstep Разрешение
Низкий Полный шаг
Высокий Низкий Низкий Половина шага Высокий Низкий 1/8 шага
Низкий Высокая Высокая 1/ 32 шага
Высокий Высокий Высокий 1/32 шага
По умолчанию GRBL настроен на срабатывание предупреждения, если конечный упор становится низким (становится заземленным). Это обсуждалось, и некоторые люди просили иметь активные верхние конечные упоры. | Концевые выключатели — это стандартные «всегда открытые» выключатели. Концевой упор активируется, когда контакт конечного упора соединяется с землей (при настройке с настройками GRBL по умолчанию). |
 Перемычки на картинке выше предоставляют варианты для обоих. Левое изображение указывает на подключение, необходимое для работы с настройкой GRBL по умолчанию. (Эта перемычка появилась только в версии 3.02)
Перемычки на картинке выше предоставляют варианты для обоих. Левое изображение указывает на подключение, необходимое для работы с настройкой GRBL по умолчанию. (Эта перемычка появилась только в версии 3.02)Конфигурация конечной остановки
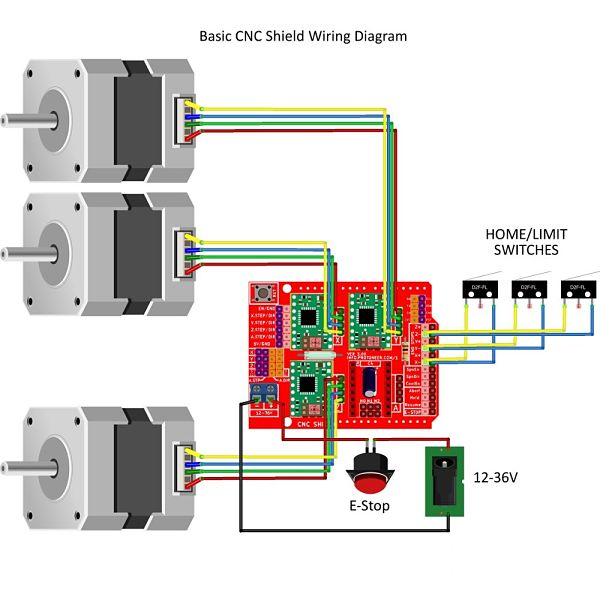
Концевые выключатели, входящие в комплект ZYLtech, имеют три провода. Такие концевики просты в использовании, контроле и установке, особенно по сравнению с простыми механическими переключателями. Однако, в отличие от экрана RAMPS, экран CNC предоставляет только 2 PIN-заголовка. Существует два способа установки концевых упоров:
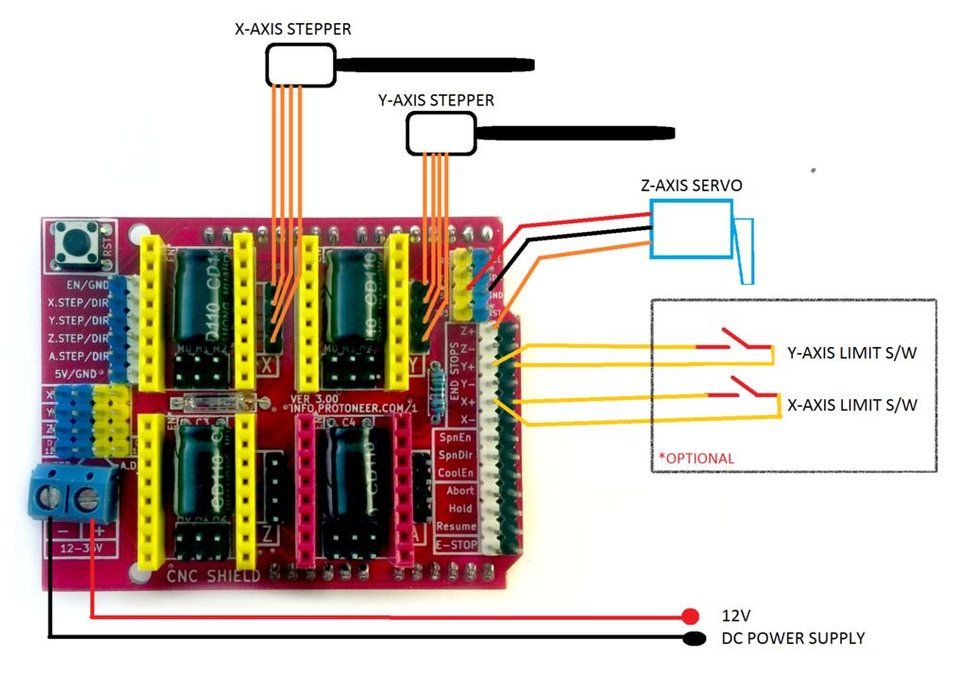
Подключение двигателей
Подключение шаговых двигателей ZYLtech Nema 17 очень просто. Подключите разъемы к заголовкам для каждой оси. Если двигатель вращается в неправильном направлении, просто поверните заглушку на 180 градусов.
Если двигатель вращается в неправильном направлении, просто поверните заглушку на 180 градусов.
Базовая плата OSOYOO + CNC Shield V3.0+A4988 Руководство по установке « osoyoo.com
Время публикации: 2017-04-07 01:04:44
Категория: Детали и проекты для Arduino IDE с открытым исходным кодом
Обзор
CNC Shield V3.0 можно использовать в качестве платы расширения привода для гравировального станка, 3D-принтера и других устройств. На плате есть 4 слота для модулей привода шагового двигателя, они могут управлять 4 шаговыми двигателями, и каждому шаговому двигателю требуется только два порта ввода-вывода, то есть 6 портов ввода-вывода вполне могут управлять тремя шаговыми двигателями, это очень удобно. удобно использовать. После того, как вы вставите CNC Shield V3.0 в базовую плату OSOYOO и установите прошивку GRBL, вы сможете быстро сделать гравировальный станок с ЧПУ своими руками.
Схема платы
Схема контактов GRBL:
Схема контактов GRBL
особенности :
Дополнительные штифты:
- Штифты концевого выключателя удвоены, так что каждая ось имеет «Верх/+» и «Низ/-». Это упрощает установку двух концевых выключателей для каждой оси. (Для использования с нормально разомкнутым выключателем)
- EStop — эти контакты можно подключить к выключателю аварийной остановки. Это делает то же самое, что и кнопка RESET на плате Arduino. (Мы советуем также установить дополнительную аварийную кнопку, которая отключает питание всего оборудования. НАСТОЯЩАЯ АВАРИЙНАЯ КНОПКА )
- Управление шпинделем и подачей СОЖ имеет собственные контакты.
- внешних командных контактов GRBL были разорваны, что позволяет добавлять кнопки для паузы/удержания, возобновления и отмены.
- (D0-1) и выводы I2C (A4-5) имеют собственные выводы для будущих расширений. Позже I2C можно будет реализовать с помощью программного обеспечения для управления такими вещами, как скорость вращения шпинделя или контроль нагрева.
- В версии 3.00 на плате добавлены перемычки для настройки 4-й оси (клонирование другой оси или запуск от контакта D12-13), разъема связи (RX+TX, I2C) и разъема управления шаговым двигателем (все контакты необходимы для запуска 4 шаговых двигателей). )
 Это упрощает установку двух концевых выключателей для каждой оси. (Для использования с нормально разомкнутым выключателем)
Это упрощает установку двух концевых выключателей для каждой оси. (Для использования с нормально разомкнутым выключателем)Последовательные выводы
 )
)Установка оборудования
Подсоедините компоненты в соответствии с фактическим положением, такие как двигатели, концевые выключатели, лазеры, моторные приводы и т.д.
При установке оборудования обратите внимание на следующие моменты:
1) Неправильное подключение +/- может привести к поломке ваших устройств и даже к возгоранию.
2) Пожалуйста, убедитесь, что вставляете драйверы в правильном направлении, иначе это может сжечь материнскую плату и драйверы, особое направление установки, пожалуйста, интегрируйте Arduino CNC Shield V3.0, см. техпаспорт электропривода. На картинке показано подключение драйверов моторов A4988 и Arduino CNC Shield V3.0.
A4988 опора 1 сегмент, 1/2 сегмента, 1/4 сегмента, 1/8 сегмента, 1/16 сегмента. Каждый сегмент задается контактным разъемом M0, M1, M2 в плате Arduino CNC Shield V3.0, заглушка перемычки соответствует высокому уровню, не закрывайте перемычку — низкому уровню.
Для повышения точности гравировки используйте сегмент 1/16, необходимо 3 перемычки для покрытия M0, M1, M2. Как показано на рисунке:
Как показано на рисунке:
3) Входное напряжение Arduino CNC Shield V3.0 составляет 12–36 В постоянного тока, входное напряжение не должно превышать 36 В. Хотя входное напряжение поддерживает блоки питания до 36 В, это не означает, что вы можете использовать 36 В ни при каких обстоятельствах, потому что напряжение питания некоторых драйверов двигателей (VMOT) меньше 36 В, таких как A4988, его напряжение питания составляет 8-35 В, если вы используете источник питания 36 В, он сожжет драйвер двигателя. Поэтому, когда вы выбираете источник питания, пожалуйста, обратитесь к соответствующему техническому паспорту драйвера двигателя. Вот несколько параметров напряжения питания для обычного драйвера двигателя:
A4988
DRV8824/DRV8825
TMC2100
Установка программного обеспечения
1)
3
BL Library Installation
Загрузите и разархивируйте файл grblmain.zip, поместите его в папку с библиотеками каталога установки Arduino IDE.
Похожие записи
-

 Автомобильный фильтр циклон: Предварительные фильтры циклоны Donaldson. Технические характеристики и каталог фильтров циклонов
Автомобильный фильтр циклон: Предварительные фильтры циклоны Donaldson. Технические характеристики и каталог фильтров циклонов - Microscope set детский инструкция на русском: Учебный микроскоп Celestron в кейсе — купить в магазине Селестрон
- Homtom ht17 pro: Обзор смартфона HOMTOM HT17 Pro / Смартфоны и мобильные телефоны / iXBT Live
- Лазерный гравер форум чпушников: Лазерный гравер для печатей — Страница 2 — Газовые лазеры