Blheli 32: Releases · blheli-configurator/blheli-configurator · GitHub
Содержание
Hobbywing XRotor Micro 60A 4in1 ESC BLHeli-32 DShot1200 (3~6S)
JavaScript seems to be disabled in your browser.
You must have JavaScript enabled in your browser to utilize the functionality of this website.
Proceed to Checkout
Итоговая цена
0,00 A$
Корзина
0
Хотите бесплатную доставку? кликните сюда Узнать больше!
{{/findAutocomplete}}
SKU:
{{sku}}
{{#isFreeshipppingEnabled}}
Бесплатная доставка подходящих заказов
{{/isFreeshipppingEnabled}}
{{#isDiscountFlag1Enabled}}
{{/isDiscountFlag1Enabled}}
{{#isDiscountFlag2Enabled}}
{{/isDiscountFlag2Enabled}}
{{#isDiscountFlag3Enabled}}
{{/isDiscountFlag3Enabled}}
{{#isDiscountFlag4Enabled}}
{{/isDiscountFlag4Enabled}}
{{#isDiscountFlag5Enabled}}
{{/isDiscountFlag5Enabled}}
{{#isDiscountFlag6Enabled}}
{{/isDiscountFlag6Enabled}}
{{#isDiscountFlag7Enabled}}
{{/isDiscountFlag7Enabled}}
{{#isDiscountFlag8Enabled}}
{{/isDiscountFlag8Enabled}}
{{#isDiscountFlag9Enabled}}
{{/isDiscountFlag9Enabled}}
{{#list_image_url}}{{/list_image_url}}
{{^list_image_url}}{{/list_image_url}}
{{#isFreeshipppingEnabled}}
Бесплатная доставка подходящих заказов
{{/isFreeshipppingEnabled}}
{{#isAddToCartEnabled}}
{{#isWarehouseAddToCartEnabled}}
{{^is_combo_product}}
Количество:
{{#isAgerestrictionEnabled}}
{{/isAgerestrictionEnabled}}
{{^isAgerestrictionEnabled}}
{{/isAgerestrictionEnabled}}
{{/is_combo_product}}
{{/isWarehouseAddToCartEnabled}}
{{/isAddToCartEnabled}}
{{#availableInOtherWarehouses}}
{{{availableInOtherWarehouses}}}
{{/availableInOtherWarehouses}}
{{#is_combo_product}}
{{^isProhibited}}
Подробнее
{{/isProhibited}}
{{/is_combo_product}}
{{#isProhibited}}
We are sorry, this product is not available in your country
{{/isProhibited}}
{{#hbk_price. stock_2_group_0_original_formated}}
stock_2_group_0_original_formated}}
{{hbk_price.stock_2_group_0_original_formated_label}}
{{hbk_price.stock_2_group_0_original_formated}}
{{/hbk_price.stock_2_group_0_original_formated}}
{{#is_combo_product}}
{{hbk_price.stock_2_group_0_combo_price_label}}
{{/is_combo_product}}
{{hbk_price.stock_2_group_0_formated}}
{{#hbk_price.stock_2_group_0_original_formated}}
{{hbk_price.stock_2_group_0_you_save_formated_label}}
{{hbk_price.stock_2_group_0_you_save_formated}}
{{/hbk_price.stock_2_group_0_original_formated}}
Регулятор T-Motor F35A 3-6S BLHeli-32 для мультикоптеров
Регулятор T-Motor F35A 3-6S BLHeli-32 для мультикоптеров
— оптом в Прямые дистрибьюции
Артикул:
TM-F35A-32B-6S
Штрихкод:
2722375351522
Бренд:
T-MOTOR (Ти Мотор)
Регулятор T-Motor F35A 3-6S BLHeli-32 для мультикоптеров
- Похожие
Регулятор T-Motor F55A PRO II 4-в-1 3-6S 4x55A 32 BIT
TM-F55APII-4IN1
5700 грн
ОжидаетсяРегулятор хода T-Motor FLAME 280A HV 12-24S для мультикоптеров
TM-FLAME280A
80250 грн
Нет в наличииРегулятор хода LittleBee 30A 2-6s для мультикоптеров (не оригинал)
FVT-30A-COPY
570 грн
Нет в наличииРегулятор T-Motor F45A 4-в-1 3-6S 4x45A BLHELI_32
TM-F45A-4IN1
3150 грн
Нет в наличии
Регулятор T-Motor F35A 3-6S BLHeli-32 для мультикоптеров
Характеристики
- Производитель: T-Motor
- Тип: Регулятор бесколлекторный
- Назначение: Мультикоптеры
- Напряжение питания: 11,1-22,2 В
- Номинальный ток: 35 А
- Тип управления двигателем: ШИМ
- Протоколы управления: DSHOT300; DSHOT600; DSHOT1200
- Охлаждение: Пассивное, воздушное
- Контроллер: STM32F051
- Прошивка: BLHeli 32bit
- Размеры: 30x16x5 мм
- Вес: 8,1 г
Комплектация
- Регулятор — 1 шт
Все характеристики:
Регулятор
- Производитель
- T-Motor
- Тип
- Бесколлекторный
- Назначение
- Мультикоптеры
- Питание
- 11.
 1 — 22.2 В
1 — 22.2 В - Номинальный ток
- 35 А
- Наличие BEC
- Нет
- Влагозащита
- Нет
- Сенсорный
- Нет
- Тип управления двигателем
- ШИМ
- Протоколы управления
- DSHOT300 | DSHOT600 | DSHOT1200
- Охлаждение
- Пассивное, воздушное
- Контроллер
- STM32F051
- Прошивка
- BLHeli 32bit
- Размеры
- 30x16x5 мм
- Вес
- 8.1 г
 1 — 22.2 В
1 — 22.2 ВСведения о товаре:
- Страна бренда
- Китай
- Страна производства
- Китай
- Рекомендованный возраст
- Не для дітей
- Материалы
- пластик нетокс., метал, гума
- Гарантия
- 1 місяць. Зберігайте етикетку.
- Срок хранения
- Необмежений
- Содержит литиевый аккумулятор
- Ні
- Условия хранения
- у місці, що захищене від прямих сонячних променів; подалі від вогню, вологи та дітей; при температурі -10°C — +30°C.
- Предупреждение
- оберігати від механічних ударів; використовуйте сумісну електроніку; не перевантажуйте.
- Инструкция
- Під’єднайте регулятор до двигуна, батареї та приймача. Перший запуск виконуйте без пропеллера. Для зміни напрямку обертання — переставте будь-які два фазні дроти.
- Единица измерения
- 1 шт
Весогабаритные характеристики
- Вес товара
- 8.1 г
- Длина товара
- 30 мм
- Ширина товара
- 16 мм
- Высота товара
- 5 мм
- Размеры товара
- 3х1,6х0,5 см
- Тип упаковки
- Пакет
- Вес в упаковке
- 0.015 кг
- Длина упаковки
- 14.5 см
- Ширина упаковки
- 9 см
- Высота упаковки
- 1 см
- Размеры упаковки
- 14,5х9х1 см
- Объём упаковки
- 0.0001 м. куб.
- Количество в ящике
- 1 шт
Регуляторы BLHeli32 и BLHeli_S — документация к коптеру
Прошивка и приложения для настройки BLHeli были разработаны для настройки регуляторов скорости и предоставления дополнительных функций. Регуляторы скорости с этой прошивкой позволяют настраивать синхронизацию, направление двигателя, светодиоды, частоту привода двигателя и т. д. Прежде чем пытаться использовать BLHeli, следуйте инструкциям по настройке DShot.
Регуляторы скорости с этой прошивкой позволяют настраивать синхронизацию, направление двигателя, светодиоды, частоту привода двигателя и т. д. Прежде чем пытаться использовать BLHeli, следуйте инструкциям по настройке DShot.
На этой странице приведены инструкции по настройке следующих функций
Поддержка сквозного подключения позволяет использовать приложение BLHeli для настройки регуляторов скорости, оставаясь при этом подключенным к автопилоту
Реверсивный DShot (режим 3D) позволяет вращать двигатель в любом направлении
Двунаправленный DShot позволяет ESC отправлять RPM обратно на автопилот без необходимости дополнительного подключения телеметрии
Телеметрия ESC позволяет ESC отправлять информацию об оборотах, напряжении и токе обратно на автопилот, чтобы ее можно было зарегистрировать, просмотреть в режиме реального времени или даже разрешить удаление монитора батареи
«BLHeli» охватывает несколько (иногда конкурирующих) проектов, предоставляющих прошивку ESC и сопутствующее программное обеспечение для настройки.
BLHeli32 имеет закрытый исходный код и основан на 32-битных микроконтроллерах ARM. Все современные регуляторы скорости BLHeli используют BLHeli32
.
BLHeli_S с открытым исходным кодом и 16-битной версией. Это больше не поддерживается активно, но последняя опубликованная версия, 16.7, устанавливается по умолчанию на регуляторы «BLHeli_S» при отправке с завода
BLHeli_S JESC — платное программное обеспечение с закрытым исходным кодом и 16-разрядная версия, позволяющая работать на более низком оборудовании
BLHeli_S BlueJay — бесплатное программное обеспечение с открытым исходным кодом и 16-разрядная версия
Поддержка Pass-Through
Функция Pass-Through позволяет обновлять и настраивать ESC BLHeli32 и BLHeli_S с помощью соответствующего приложения BLHeliSuite32 или BLHeliSuite (работающего на ПК пользователя), в то время как ESC остаются подключенными к автопилоту. Чтобы использовать эту функцию, выполните следующие действия
Загрузите и установите BLHeliSuite32 (для использования с регуляторами BLHeli32), BLHeliSuite (для регуляторов BLHeli_S) или конфигуратор JESC (для использования с регуляторами BLHeli_S JESC) на свой ПК
Подключите компьютер к автопилоту с помощью USB-кабеля, а затем подключите его к наземной станции (например, Mission Planner, QGC).
Установите для SERVO_BLH_AUTO значение 1, чтобы автоматически включить сквозной режим на всех выходах, сконфигурированных как двигатели (например, SERVOx_FUNCTION = «Motor1», «Motor2» и т. д.) для мультикоптеров и квадропланов или газа (например, для тех, у которых SERVOx_FUNCTION установлен на 70 («дроссель» ), 73 («дроссель влево») или 74 («дроссель вправо»)) на вездеходах. Для большинства мультикоптеров, квадропланов и марсоходов это будет правильно, но для самолетов установите SERVO_BLH_MASK, чтобы включить сквозную передачу на соответствующих выходах сервоприводов.
Если ваш ПК подключен к автопилоту с помощью радиотелеметрии (вместо использования USB-кабеля, как рекомендовано выше), установите SERVO_BLH_PORT на порт автопилота, подключенный к радиотелеметрии. Имейте в виду, что это НЕ указывает порт, используемый для обратной связи телеметрии ESC с вашим автопилотом!
При использовании защитного выключателя убедитесь, что он нажат (или отключен, установив BRD_SAFETY_DEFLT = 0).
(BRD_SAFETYENABLEв старых версиях прошивки)Отключите наземную станцию (но оставьте кабель USB подключенным)
Запустите программу настройки ESC и подключитесь к COM-порту автопилота, выбрав «BLHeli32 Bootloader (Betaflight/Cleanflight)» в меню интерфейсов. Нажмите «Подключиться» и «Читать настройки». Вы должны иметь возможность обновить и настроить все подключенные ESC
.

 (
(Примечание
Прошивка ArduPilot поддерживает сквозной протокол только с последней версией прошивки BLHeli32 и BLHeliSuite32 или прошивкой BLHeli_S и BLHeliSuite.
Предупреждение
Для работы сквозной передачи автопилот должен быть настроен на использование одного из протоколов DShot. Если вы хотите в конечном итоге использовать один из других протоколов (например, PWM, OneShot125), которые поддерживает ESC, вы все равно можете настроить ESC с использованием Pass-Through (например, изменить направление двигателя, установить минимальные/максимальные значения и т. д.), но затем, наконец, — настроить автопилот на , а не на , использовать DShot. Как только автопилот и ESC перезагрузятся, ESC должен автоматически определить, что ESC больше не используют DShot.
д.), но затем, наконец, — настроить автопилот на , а не на , использовать DShot. Как только автопилот и ESC перезагрузятся, ESC должен автоматически определить, что ESC больше не используют DShot.
Реверсивные ESC DShot
Реверсивный DShot (режим 3D) позволяет вращать двигатель в любом направлении, что важно для вездеходов, лодок и самолетов с обратной тягой.
В настоящее время поддерживаются только реверсивные регуляторы DShot с поддержкой BLHeli32 и BLHeli_S. Чтобы использовать его, выход, который управляет им, должен быть обозначен соответствующим битом в параметре битовой маски SERVO_BLH_3DMASK. Это сопоставит выходные значения 1000-1500-2000 с правильными цифровыми значениями для ESC, чтобы обеспечить работу диапазона FullReverse-Idle-FullForward, соответственно.
Если команды DShot включены, то ArduPilot автоматически настроит ESC в реверсивный режим (режим 3D) при запуске в соответствии с SERVO_BLH_3DMASK. Включение команд DShot позволит отправлять другие команды DShot на любой другой ESC, настроенный как DShot, с помощью параметров маски DShot, описанных в инструкциях по настройке DShot.
Включение команд DShot позволит отправлять другие команды DShot на любой другой ESC, настроенный как DShot, с помощью параметров маски DShot, описанных в инструкциях по настройке DShot.
В противном случае вы должны вручную настроить «Motor Direction» ESC на «Bidirectional 3D», как показано ниже.
Примечание
В настоящее время ArduPilot поддерживает использование реверсивных ESC только для самолетов и вездеходов, но не для коптеров.
Телеметрия ESC
Если ESC имеет эту возможность, он позволяет отслеживать и регистрировать данные о производительности, для которых ранее требовались дополнительные датчики (например, силовые модули и датчики оборотов). Подробные данные, предоставляемые каждым ESC, позволяют принимать решения в режиме реального времени, а также настраивать работу отдельных ESC или двигателей и анализировать отказы. Обратите внимание, что данный ESC может иметь или не иметь данные определенного датчика, передаваемые через телеметрию. Для esc 4 в 1 характерно наличие датчиков напряжения и тока, но передача данных осуществляется не посредством телеметрии, а путем прямого подключения к автопилоту. Для получения подробной информации см. техническое описание ESC и информацию о подключении.
Для esc 4 в 1 характерно наличие датчиков напряжения и тока, но передача данных осуществляется не посредством телеметрии, а путем прямого подключения к автопилоту. Для получения подробной информации см. техническое описание ESC и информацию о подключении.
Примечание
В настоящее время ArduPilot не поддерживает опрос регуляторов скорости для получения данных телеметрии посредством сообщений о холостом ходу дроссельной заслонки по сигнальной линии в протоколах, отличных от DShot.
Подключение проводов телеметрии ESC
Подсоедините все провода телеметрии ESC к одному контакту RX последовательного порта на автопилоте (на приведенной выше схеме в качестве примера используется Serial5). На большинстве регуляторов BLHeli32 штифт или провод для телеметрии ESC предварительно припаян. Если провод не припаян заранее, вам придется припаять его самостоятельно. Распиновку последовательного порта CubePilot можно найти здесь.
Установите следующие параметры, чтобы включить обратную связь телеметрии BLHeli32 с последовательным портом автопилота:
SERIALx_PROTOCOL 16 (= телеметрия ESC), где «x» — номер последовательного порта автопилота, подключенного к проводу телеметрии ESC.
Сопоставление нумерации последовательных портов и физических портов UART для вашего автопилота должно быть задокументировано на его странице описания, ссылка на которую приведена здесь.SERVO_BLH_TRATE по умолчанию равно 10 и обычно не требует изменения. это позволяет телеметрию с частотой обновления 10 Гц от ESC. При использовании функции гармонического выреза это значение может быть увеличено до 100.
SERVO_BLH_POLES по умолчанию имеет значение 14, которое применяется к большинству бесколлекторных двигателей и обычно не требует изменения. При необходимости отрегулируйте, если вы используете двигатели с числом полюсов, отличным от 14, чтобы рассчитать истинные обороты вала двигателя на основе оборотов электронного поля ESC.
 Сопоставление нумерации последовательных портов и физических портов UART для вашего автопилота должно быть задокументировано на его странице описания, ссылка на которую приведена здесь.
Сопоставление нумерации последовательных портов и физических портов UART для вашего автопилота должно быть задокументировано на его странице описания, ссылка на которую приведена здесь.Настройка
Сначала убедитесь, что на ваших регуляторах установлена соответствующая версия BLHeli32 или BLHeli_S. Большинство ESC не поставляются предварительно установленными в этих версиях. Официальная версия 32.7 BLHeli32 поддерживает двунаправленный DShot. Официальные версии BLHeli_S не поддерживают двунаправленный DShot, вам нужно будет либо купить версию у BLHeli_S JESC, либо использовать BLHeli_S BlueJay. Если вы попытаетесь включить двунаправленный DShot с неправильной версией прошивки, может произойти непредсказуемая работа двигателя.
Официальная версия 32.7 BLHeli32 поддерживает двунаправленный DShot. Официальные версии BLHeli_S не поддерживают двунаправленный DShot, вам нужно будет либо купить версию у BLHeli_S JESC, либо использовать BLHeli_S BlueJay. Если вы попытаетесь включить двунаправленный DShot с неправильной версией прошивки, может произойти непредсказуемая работа двигателя.
Установите следующие параметры для включения двунаправленного DShot BLHeli32 и BLHeli_S:
SERVO_BLH_BDMASK: растровое изображение, используемое для включения поддержки двунаправленного DShot BLHeli32 или BLHeli_S. На полетных контроллерах без IOMCU обычно устанавливается значение 15, чтобы указать четыре активных канала. На полетных контроллерах с IOMCU можно установить значение 3840, чтобы указать четыре активных канала AUX (двунаправленный DShot будет работать только на выходах AUX).
SERVO_BLH_POLES по умолчанию имеет значение 14, которое применяется к большинству бесколлекторных двигателей и обычно не требует изменения.
Отрегулируйте по мере необходимости, если вы используете двигатели с числом полюсов, отличным от 14, чтобы рассчитать истинное число оборотов вала двигателя из числа оборотов электронного поля ESC (маленькие двигатели могут иметь 12 полюсов).
 Отрегулируйте по мере необходимости, если вы используете двигатели с числом полюсов, отличным от 14, чтобы рассчитать истинное число оборотов вала двигателя из числа оборотов электронного поля ESC (маленькие двигатели могут иметь 12 полюсов).
Отрегулируйте по мере необходимости, если вы используете двигатели с числом полюсов, отличным от 14, чтобы рассчитать истинное число оборотов вала двигателя из числа оборотов электронного поля ESC (маленькие двигатели могут иметь 12 полюсов).BLHeli_32 версия 32.9 выпуск
от montis 04.10.2022 | 10:33
0
Опубликовано в Руководстве
Выпущена новая версия 32.9 модуля BLHeli_32 . В этой версии есть несколько интересных новых функций и исправлений.
BLHeli_32 Rev32.9 журнал изменений
- Добавлена поддержка регулируемой частоты вращения двигателя с регулируемой частотой вращения двигателя
- Добавлена поддержка для очень высокой компенсации демагничивания
- Добавлена поддержка адаптивной защиты питания на низких оборотах
- Модифицированный режим защиты от опрокидывания без форсирования запуска
- Значительно сниженный уровень шума в данных Dshot erpm в реальном времени
- Улучшенная последовательность разгона y, что помогает, например, флип-стопы более точные
- Исправлена ошибка, из-за которой микроконтроллеры MM32SPIN160 иногда зависали
- Некоторые мелкие исправления
BLHeli_32 Rev32.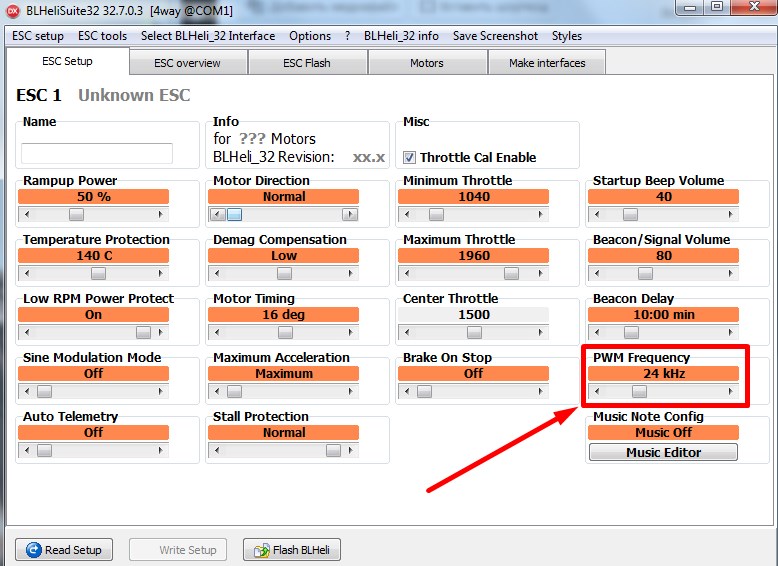 9 изменения в деталях
9 изменения в деталях
Частота ШИМ:
Редакции кода от Rev32.9 и на поддержке переменная частота PWM управляется двигателем 1 RPM5. Этот режим называется « By RPM ».
Этот режим можно активировать, установив высокую частоту ШИМ на максимум.
Если разрешить частоте ШИМ управлять частотой вращения, а не дроссельной заслонкой, некоторые артефакты, которые могут
, возникающие из-за управления дроссельной заслонкой, можно облегчить.
Компенсация демагирования:
Редакции кода, начиная с Rev32.9 и далее, также поддерживают настройку под названием « Very High », для которой мощность
отключается еще более агрессивно.
Как правило, чем выше значение параметра компенсации, тем лучше защита.
Если установлена слишком высокая компенсация демагничивания, для некоторых двигателей
максимальная мощность может быть несколько снижена.
Защита мощности при низких оборотах:
Редакции кода, начиная с Rev32.9 и далее, имеют режим, который называется « On Adaptive ». Эта настройка
предназначена для больших двигателей с низким кВ, работающих от довольно низкого напряжения батареи. Но его можно использовать,
и действительно подходит для любого двигателя кВ и напряжения батареи. В этом режиме код вычисляет
кВ*напряжение и соответствующим образом регулирует защиту мощности при низких оборотах.0162 и более поздние версии имеют режим ослабленной защиты от опрокидывания , где
при запуске для этого режима не требуется ускорение. Поэтому, если вы летите с очень низким дросселем, а двигатели
останавливаются, например. за счет обратного потока, то они просто плавно снова заведутся на низком дросселе
.
Вы можете скачать комплект BLHeli_32 отсюда: https://github.
